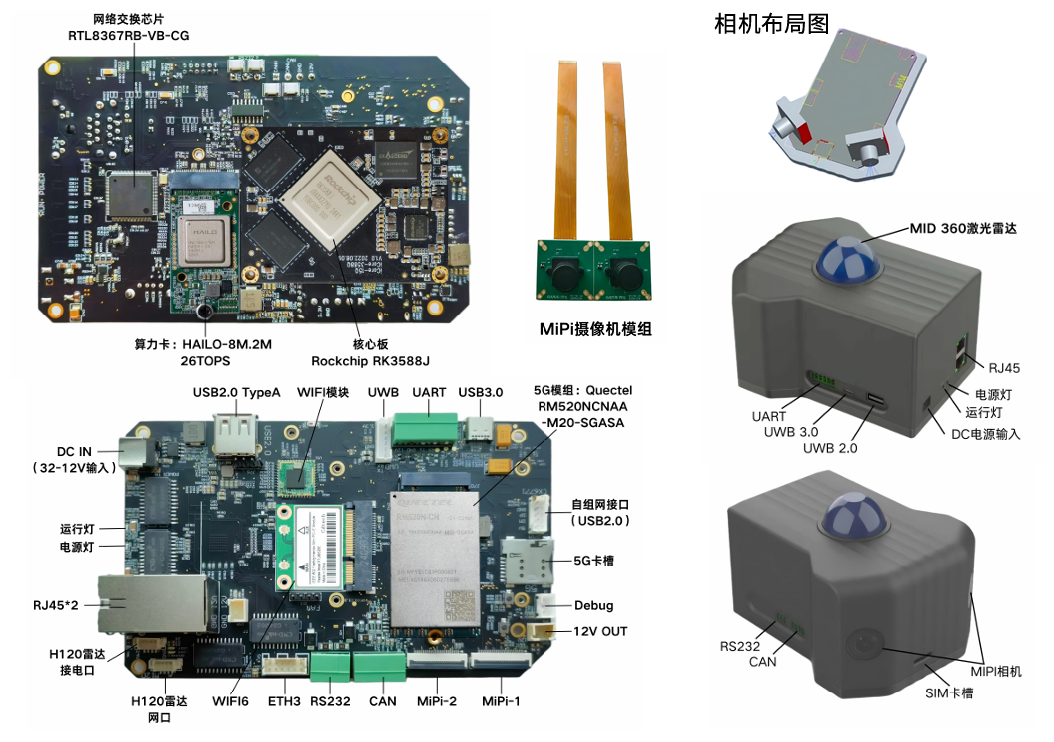
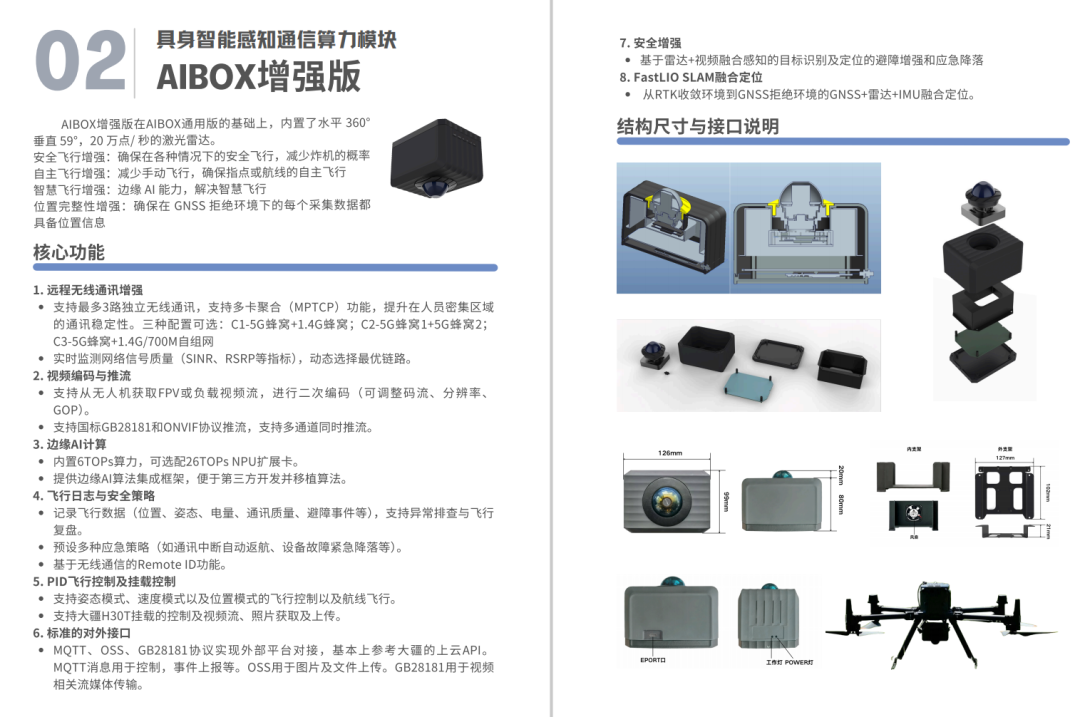
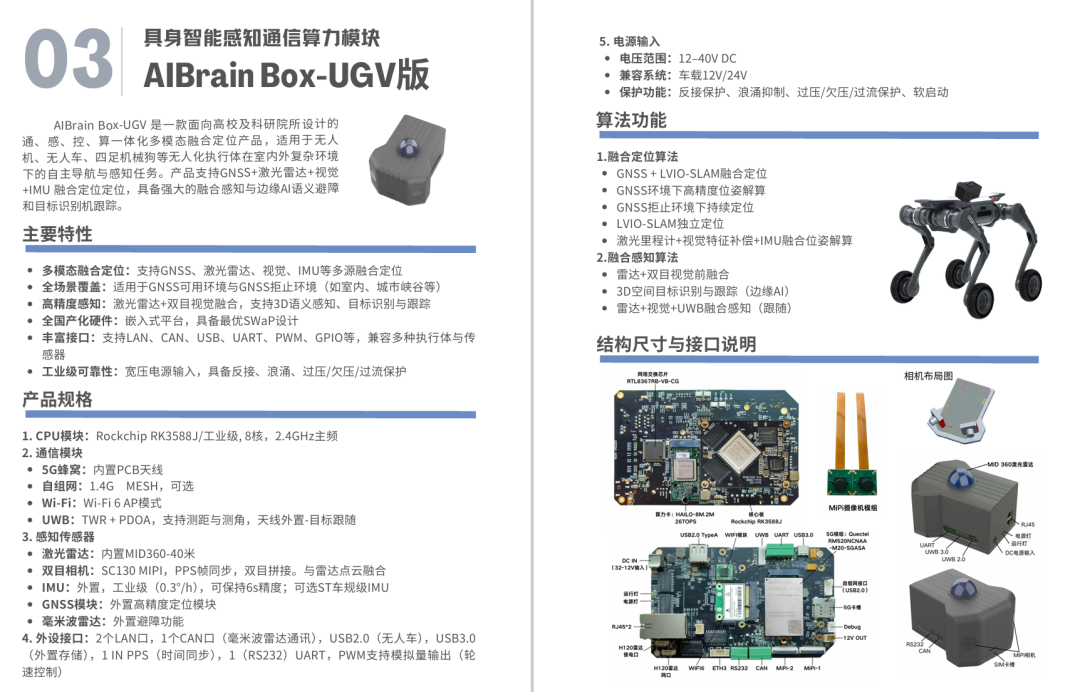
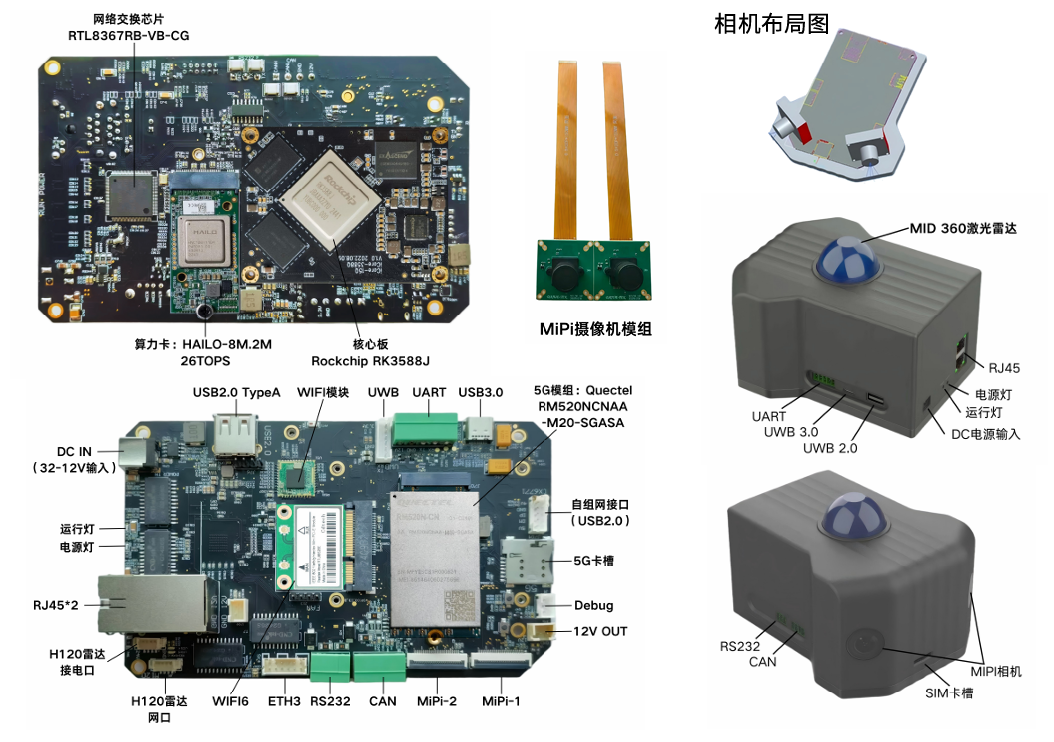
全国产通、感、算、控一体化AIBrainBox:5G+自组网 双C2链路、多模态融合定位、国产化高帧率全局曝光MIPI相机、边缘AI;工业级INS模块

双MIPI相机接口(高帧率、全局曝光)
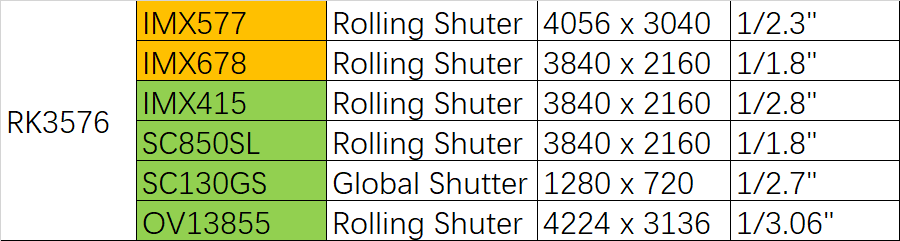
国产化Sensor、130万像素,全局曝光、高帧率(最高可达240、推荐60-100帧)
ISP定制
可选MIPI相机模组:
-
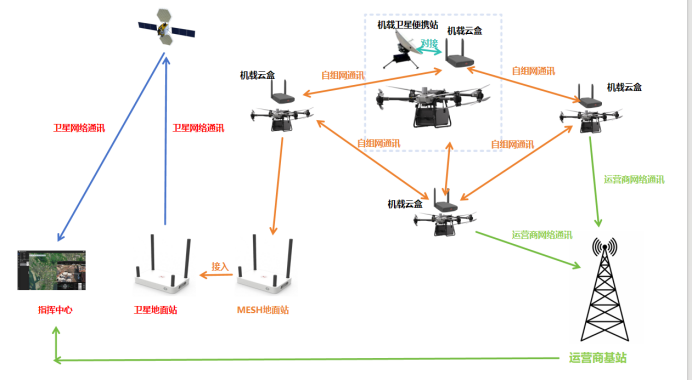
双5G+MESH自组网
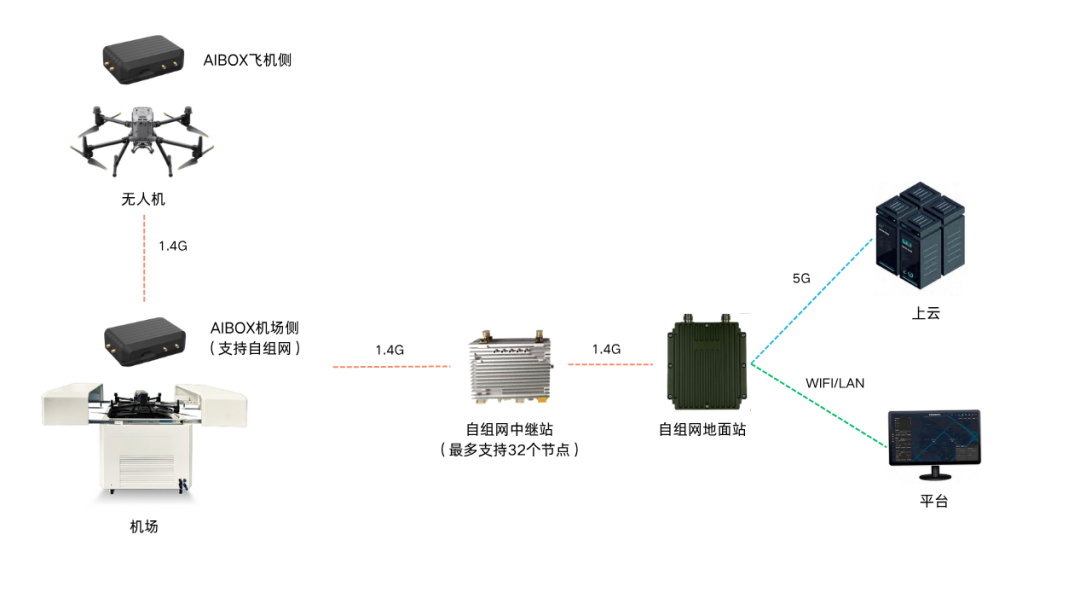
1、5G+1.4G LTE
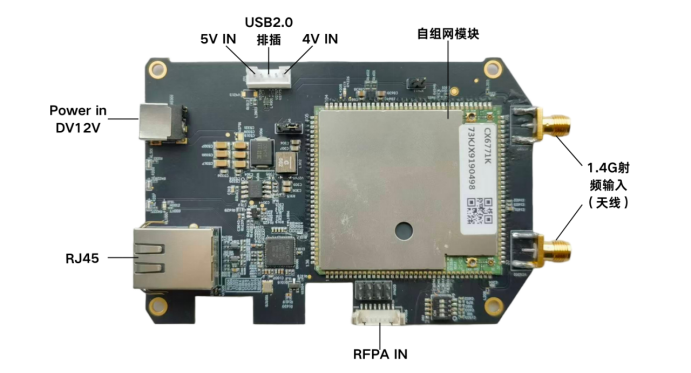
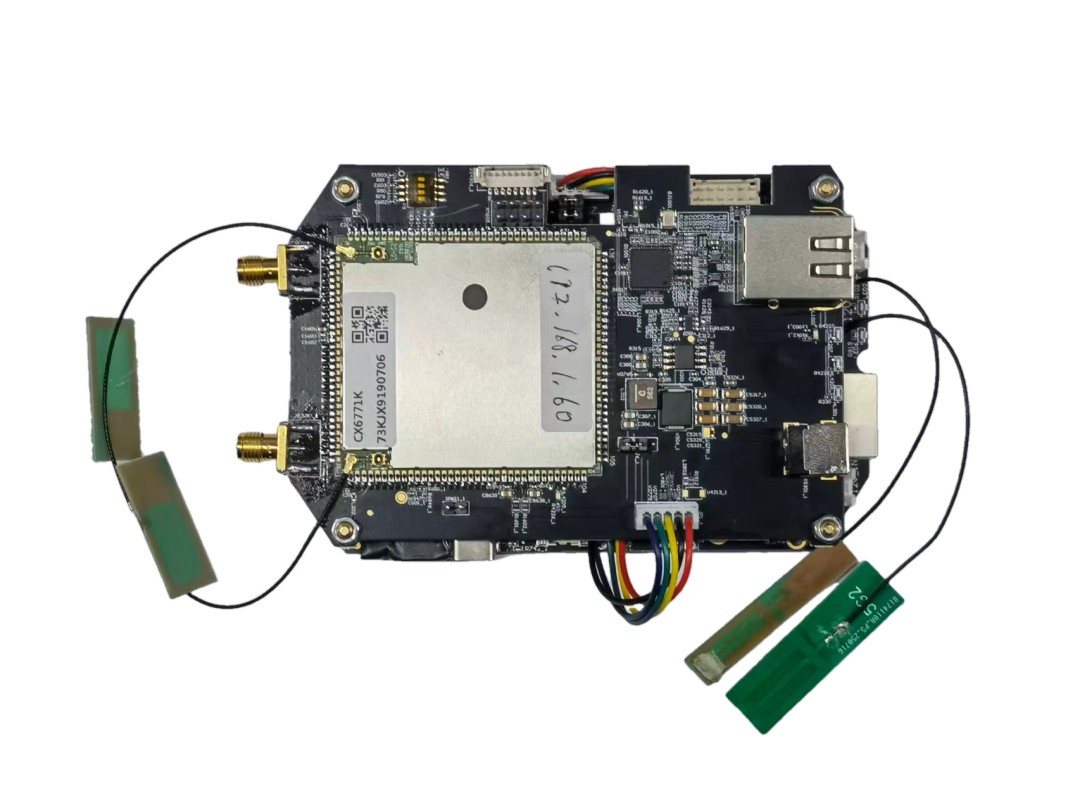
2、5G+1.4G 自组网
3、双5G
MPTCP多链路捆绑和多发选收两种机制

- 5G+自组网双链路捆绑MPTCP-无人化集群通算一体化

空侧5G和1.4G自组网天线都是内置PCB天线,地面端5G采用内置PCB天线,1.4G采用外置天线。
自组网子卡:
- 激光雷达-FAST-LIO
- GNSS+LiDAR+双目+工业级IMU-适用无人车、机械狗
复杂环境自主驾驶

GNSS+LiDAR+双目+工业级IMU 多模态室内外SLAM融合定位
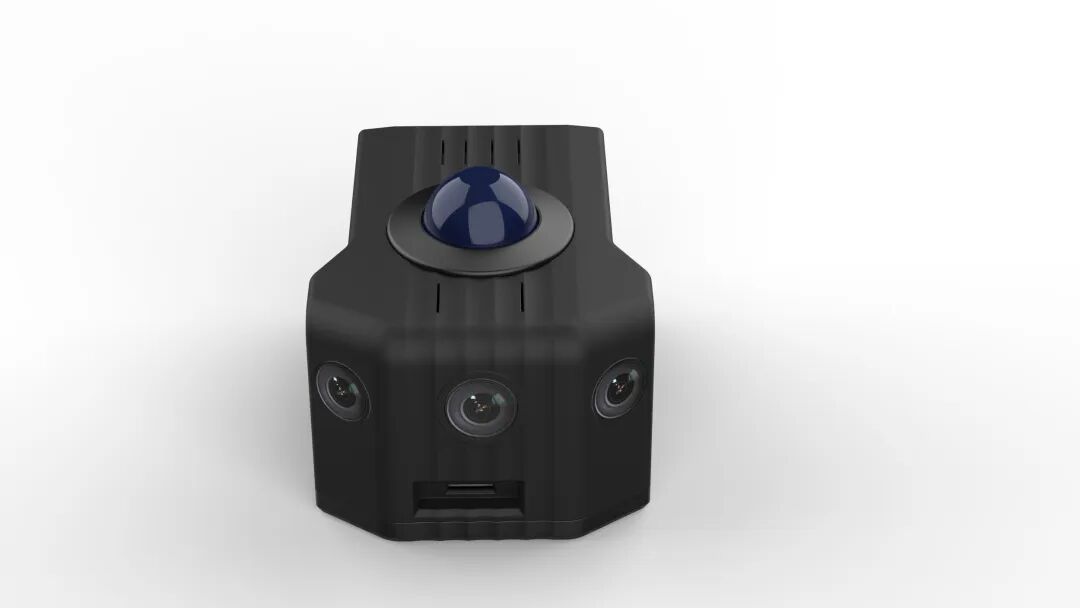
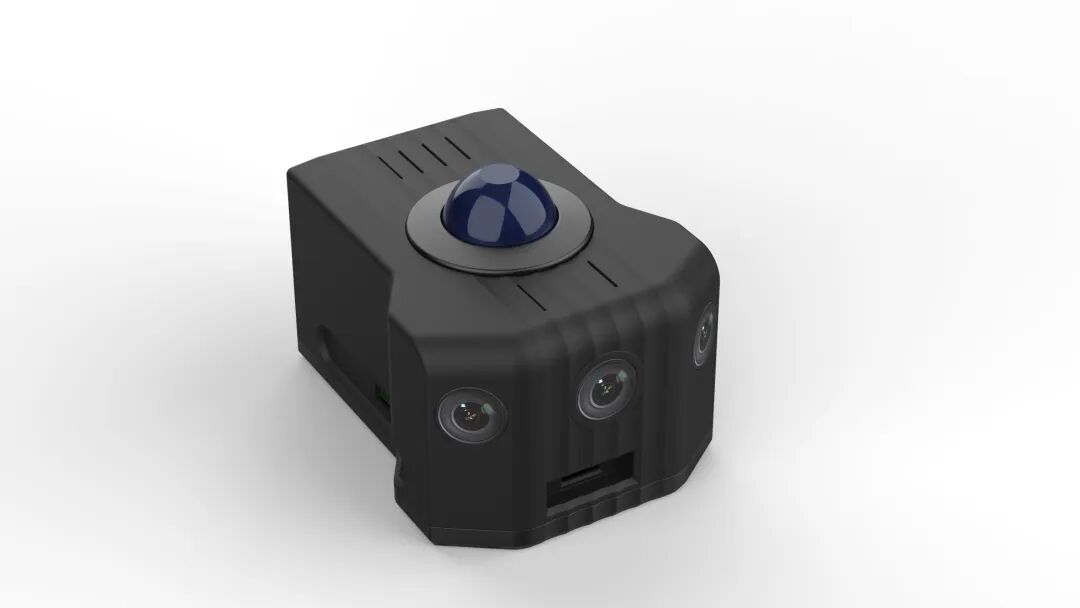
- AiBrainBox-V:非对称多目相机系列-无人机


AiBrainBox-V
Engineering Platform for Spatial AI and SLAM
AiBrainBox-V Series
| 产品 | 传感器 |
|---|---|
| V1L | SC850(可选面阵固态激光雷达-Z) |
| V2N | SC130 + SC850+IMU(可选Airy或面阵固态激光雷达LVIO) |
| V3I | SC130 + SC850 + SC635+IMU(可选面阵固态激光雷达-定高飞行) |
| V4I | SC130 + SC850 + SC635*2+IMU(可选面阵固态激光雷达-定高飞行) |
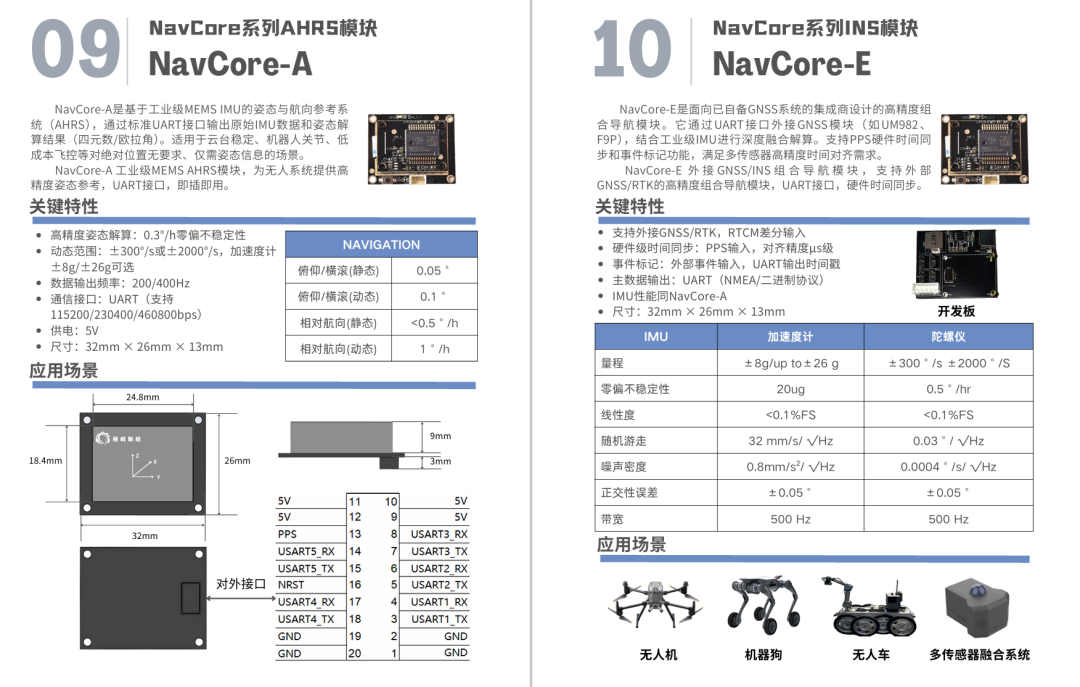
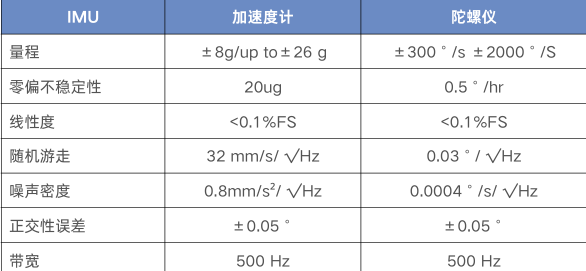
- 工业级AHRS/INS模块
- GB28181+MQTT+OSS
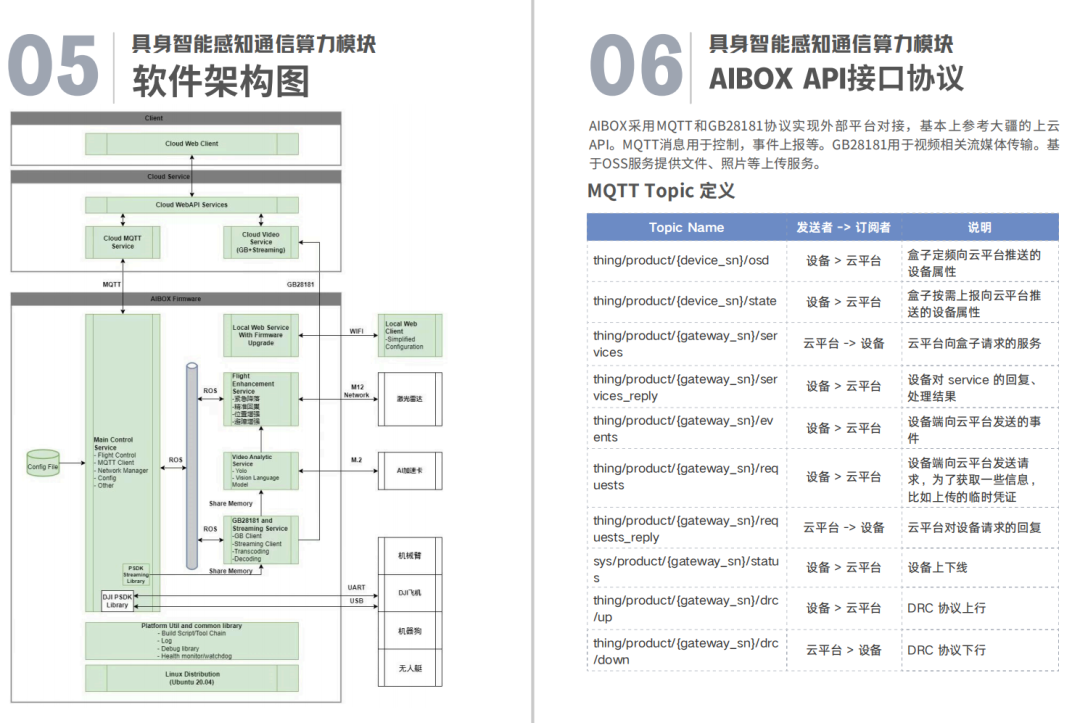
-
实时/历史视频流媒体+飞行服务+远程调式云服务
开发调试版和商用版

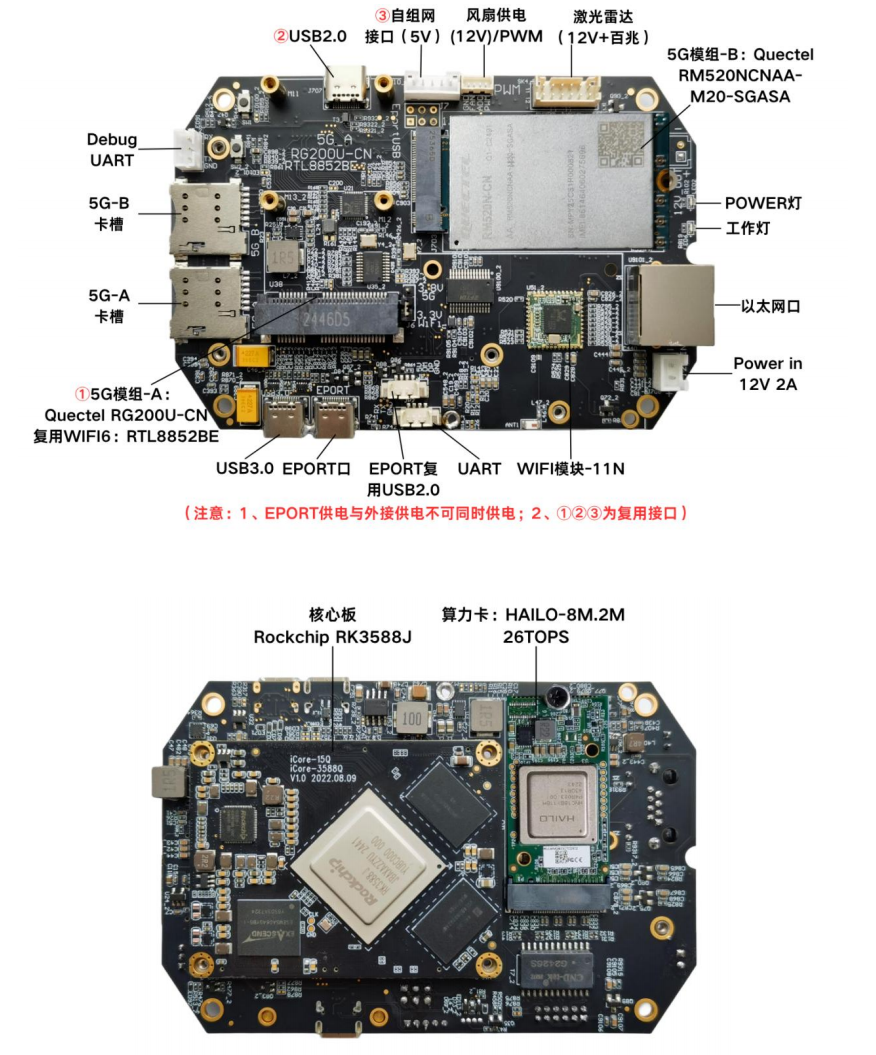
NPU-6T+26T
-
支持6.0T 算力(核心板自带)
-
可选配26T 算力(HAILO-8M.2M 26TOPS)


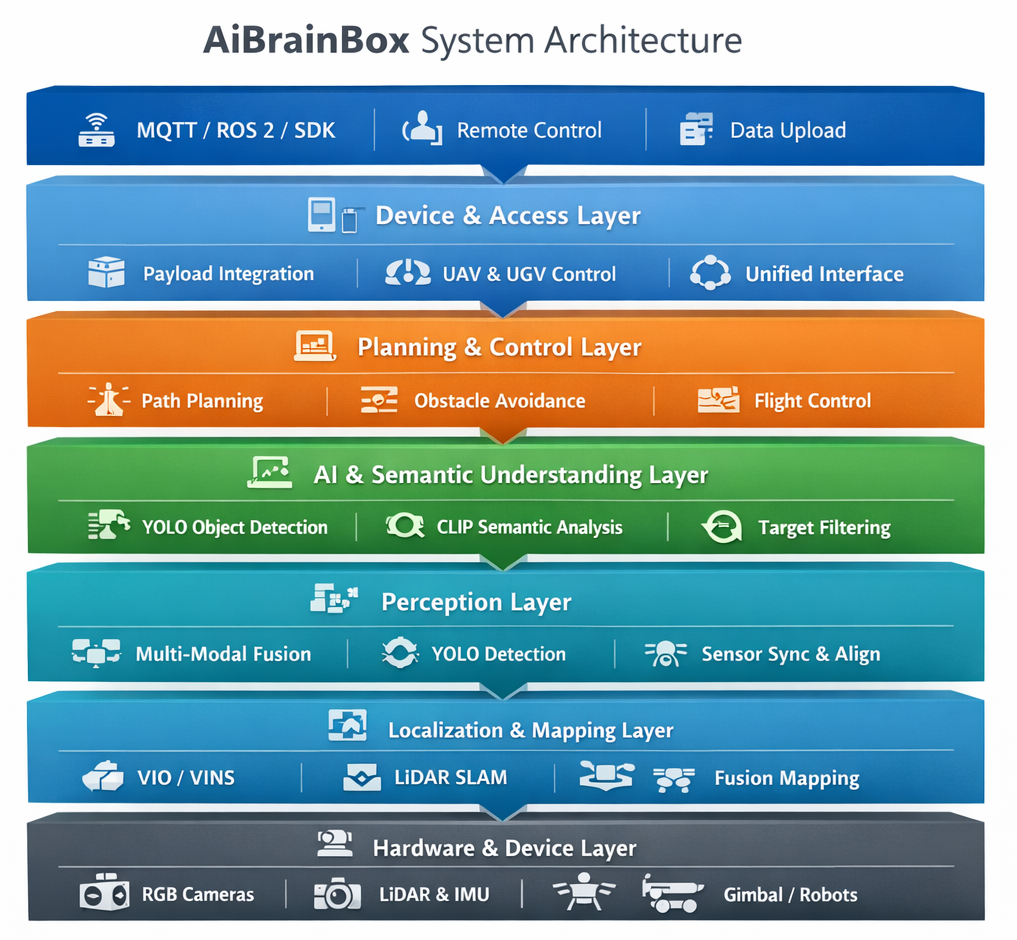
1️⃣ 感知模块(Perception Layer)
标准能力:
-
多目RGB相机接入(MIPI)及硬件级帧同步
-
LiDAR点云处理及PTP时间同步
-
工业级IMU数据采集与预处理
-
多传感器统一时间同步与数据记录
核心能力:
-
多模态数据对齐(视觉+雷达+惯导)
-
RGB图像拼接与多视角融合
-
雷视融合标定与空间对齐
AI能力:
- 目标检测(YOLO系列)
👉 输出:统一时空对齐的多模态感知数据
2️⃣ 定位与建图模块(Localization & Mapping)
标准能力:
-
VIO / VINS视觉惯导定位
-
LiDAR SLAM三维建图
-
LIO融合建图(视觉+雷达+IMU)
-
地图匹配与重定位
核心能力:
-
多传感器融合定位(视觉+LiDAR+IMU)
-
GNSS拒止环境稳定运行
👉 输出:高精度位姿 + 地图
3️⃣ 决策与控制模块(Planning & Control)
标准能力:
-
路径规划(全局 / 局部)
-
动态避障
-
目标跟踪与行为控制
-
航线飞行 / 指点飞行 / 远程操控
系统能力:
-
飞控接口(MAVLink / Offboard控制)
-
本地任务执行与日志记录
👉 输出:可执行控制指令(面向飞控/执行体)
4️⃣ 通信与协同模块(Communication & Collaboration)
标准能力:
-
5G / WiFi / Mesh自组网通信
-
多链路融合(MPTCP)
-
链路质量感知与动态切换(LQSR + FSM)
核心能力:
-
空地通信(UAV ↔ 地面)
-
多机协同通信(Swarm)
👉 输出:稳定可靠的数据与控制链路
5️⃣ 边缘AI与语义模块(AI Understanding Layer)
标准能力:
-
边缘AI推理框架
-
多模型调度(视觉模型 / 语义模型)
核心能力:
-
目标检测与识别(YOLO)
-
语义理解(CLIP)
-
目标过滤 / 去重 / 检索
👉 输出:结构化"语义信息"(而非原始数据)
6️⃣ 外设接入模块(Device Access Layer)
吊舱接入:
- 支持多类型吊舱(如H30T / C3-C5)控制与数据接入
执行体接入:
-
无人机(DJI / PX4 / ArduPilot体系)
-
地面机器人(如机器狗/UGV)
核心能力:
-
统一设备抽象层
-
异构平台兼容
👉 输出:统一控制接口(屏蔽硬件差异)
7️⃣ 应用与接口模块(Application & Interface Layer)
通信与接口:
-
MQTT设备管理与远程控制
-
REST / SDK接口(建议补充)
-
ROS 2 / DDS实时通信
数据服务:
-
图像/数据上传(OSS)
-
视频流(GB28181)
运维能力:
-
OTA远程升级
-
远程调试(RTTY)
-
参数配置管理
👉 输出:面向客户系统的标准接口能力