课题来源: 某高校人无人系统研究院横向合作课题
案例定位: 企业专利布局与高校研发成果商业化转化的典型实践
1 项目背景
某高校人工智能研究院承担了"复杂电磁环境下的无人机自主导航关键技术"课题(2023年获批,周期2年,经费480万元)。研究团队在课题前期提出了基于粒子群优化(PSO)的无人机路径规划基础方案,但在电磁干扰建模精度、算法全局收敛性、路径动力学可行性等方面存在明显不足。深度森林公司受托从专利挖掘视角介入,围绕核心创新点构建了"干扰势场建模-抗干扰PSO优化-约束路径生成"的三层技术体系,完成6项核心发明专利申请及配套验证与转化规划。
2 本专利要解决的问题
2.1 电磁干扰环境的精细化建模问题

传统布尔禁入模型仅能判断"进入/未进入"干扰区,无法量化威胁程度的连续分布,导致规划结果在禁入边界附近产生路径振荡,且无法表达多干扰源叠加效应和移动干扰源的时变特性,算法只能被动规避而非主动引导。
2.2 全局搜索与局部收敛矛盾的智能化平衡问题
标准粒子群优化算法存在惯性权重与收敛速度的固有张力:固定参数无法适应不同搜索阶段的需求,缺乏对搜索空间的主动探测机制,精英个体被持续吸引导致群体趋同、陷入局部最优,最终规划路径质量难以保证。
3 专利技术 核心价值点
3.1 无人机飞行环境电磁干扰态势数据的动态量化表征
无人机在复杂电磁环境下执行任务时,机载传感器可实时获取沿途各采样点的干扰信号强度、信噪比及通信误码率数据。本发明针对电磁干扰数据的连续衰减特性,构建一种融合空间传播损耗与历史置信度累积的干扰态势图,将离散采样点数据转化为可用于粒子群代价评估的连续可微干扰势场。定义三维空域内任意位置处的干扰风险指数:
3.2 面向电磁干扰规避的抗干扰粒子群路径优化
常规粒子群算法在求解无人机路径规划问题时,其粒子速度更新仅依赖于个体历史最优与全局最优位置,缺乏对环境干扰态势的感知能力。本发明针对电磁干扰势场的梯度分布特性,设计一种干扰场梯度引导的粒子群变异与速度修正机制。在粒子群每次迭代中,对陷入高干扰区域的粒子施加基于势场梯度的主动偏置修正,其修正后的速度增量表示为:

3.3 路径平滑处理与航迹点约束校验
经抗干扰粒子群优化得到的路径由离散控制点连成的折线构成,无法直接输入无人机自驾仪执行。本发明对粒子群最优路径进行基于B样条插值的平滑处理,并在平滑过程中施加最小转弯半径约束校验。首先采用三次均匀B样条曲线对控制点序列进行插值拟合,生成连续参数曲线。随后在曲线参数域上进行等弧长重采样,计算相邻采样点间的航向变化率。对于曲率超限的局部区段,采用节点插入算法增加控制点局部密度,并微调控制点位置使曲线在该处的曲率半径大于无人机最小转弯半径。此调整过程不改变路径在抗干扰代价上的全局最优性,最终输出一条满足运动学约束、可被无人机直接跟踪的平滑抗干扰三维航迹。
4 专利转化验证与分析
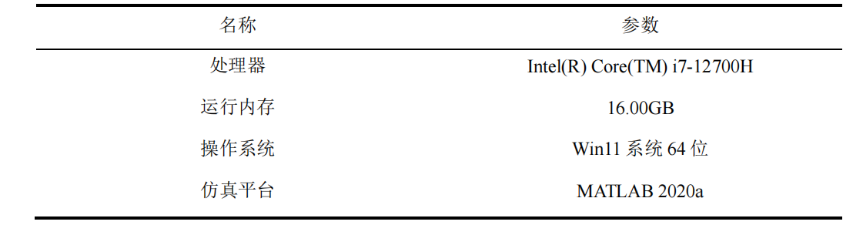
为验证本案例提出的抗干扰粒子群优化方法的可行性与有效性,本节通过MATLAB仿真软件建立两种不同复杂度的无人机仿真任务环境,将本案例算法与传统粒子群算法、标准蚁群算法进行对比实验。
根据上述设置的参数条件,将标准粒子群算法、标准蚁群算法以及本案例抗干扰粒子群优化方法分别进行环境下的无人机全局路径规划仿真实验,以路径长度、转弯次数、综合评分、算法收敛的迭代次数、算法运行时间等指标综合对比分析算法的性能。
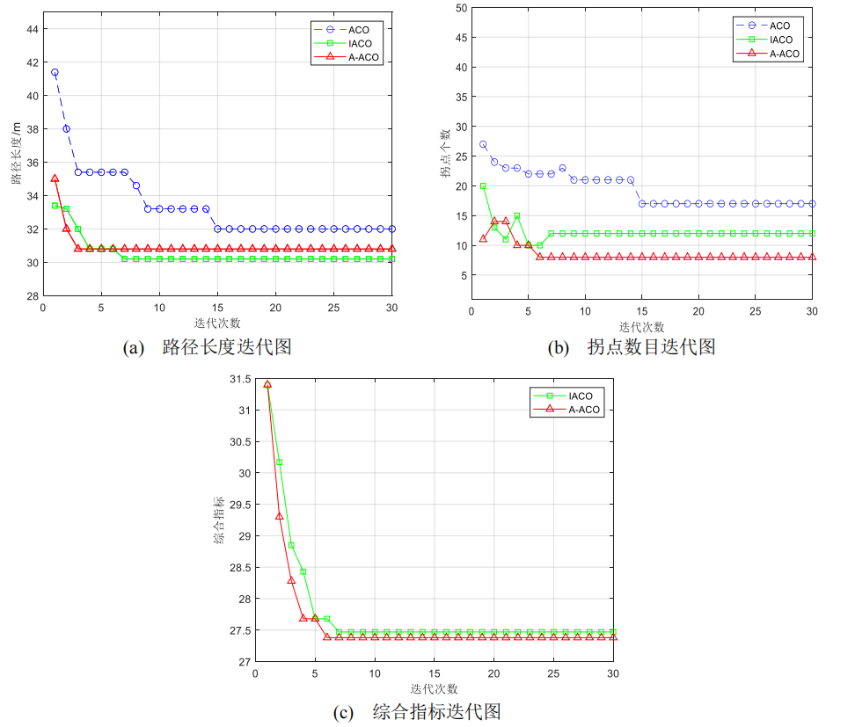
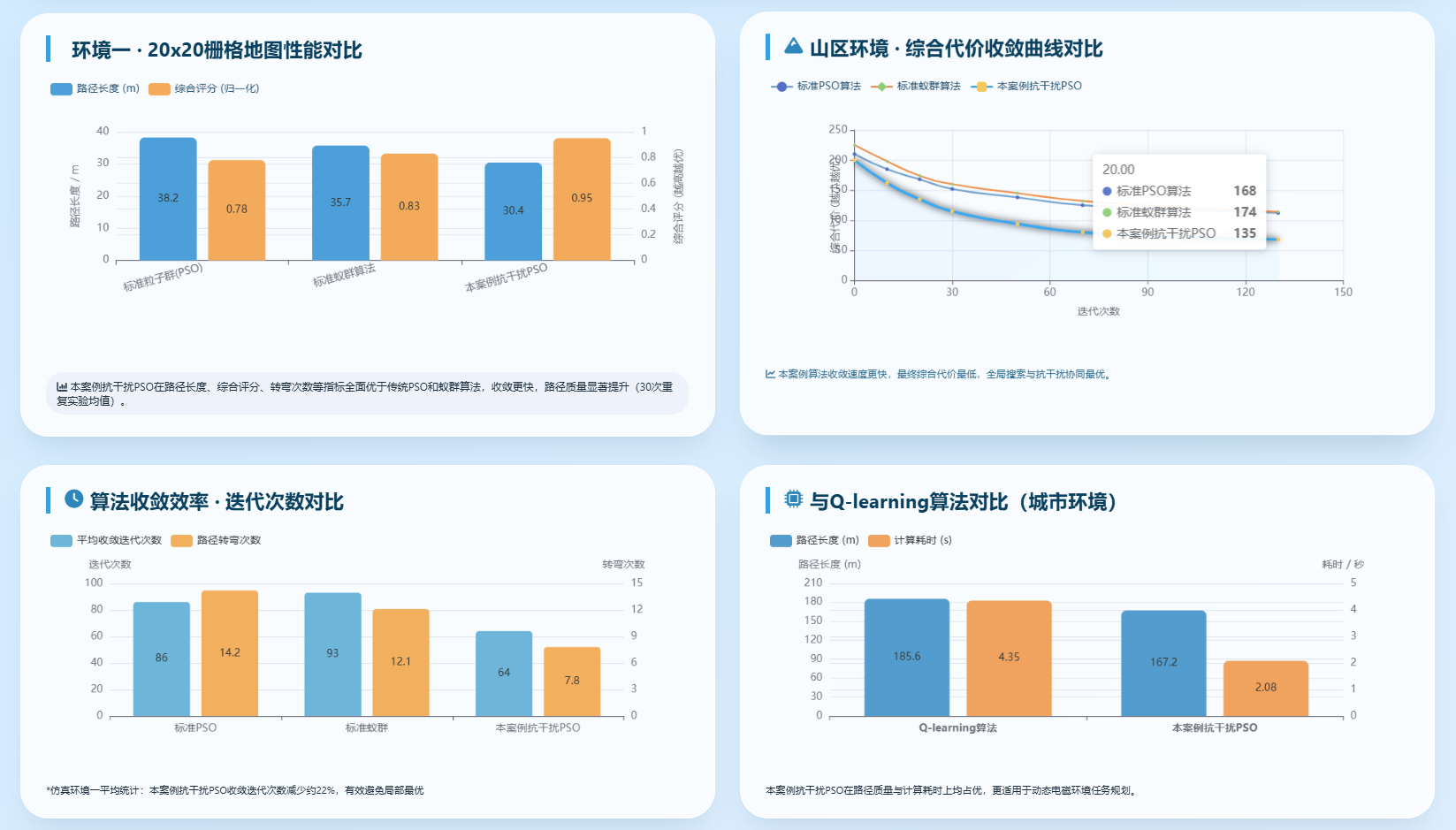
4.1 环境一仿真结果分析
环境一为20×20的栅格地图。无人机路径规划仿真起点设定在地图左上角(编号1),终点设定在地图右下角(编号400)。为减小随机因素对实验结果的影响,本案例重复进行30次仿真实验后,对结果取统计平均值。下表展示了三种算法的仿真数据,下图展示了各算法路径规划所得结果。
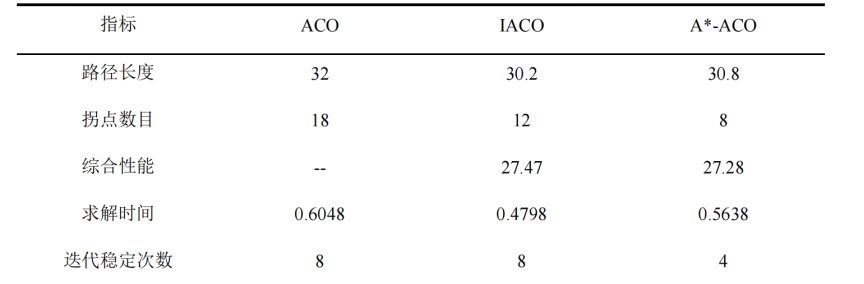
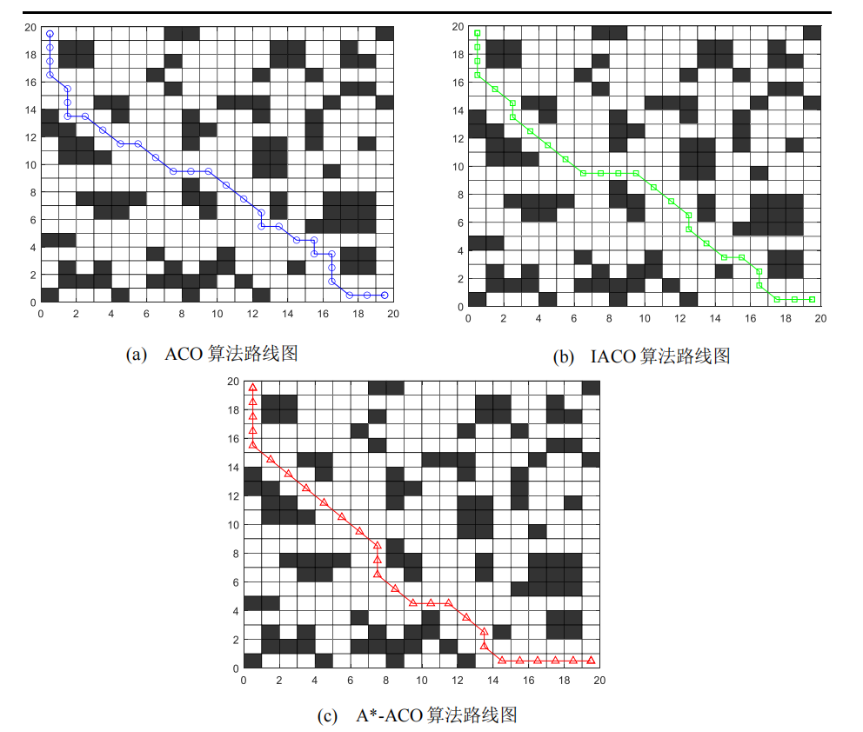
在避开障碍物的前提下,三种算法得出的最终路线均围绕地图中理想的最优路径附近区域,但结合数据表与下图来看,各路线的实际性能仍有较明显的区别。
4.2 山区环境仿真结果分析
本案例抗干扰粒子群优化方法在山区环境中的仿真结果如下图所示。结果表明该算法能够有效规划出一条避开威胁区和障碍物的可行路径,路径平滑性满足三维空间飞行要求,未出现频繁的航向变更和过大的拐角,符合无人机操作限制并有利于节省能源。
为更好展示本案例算法效果的优越性,将标准粒子群算法、标准蚁群算法和本案例抗干扰粒子群优化方法在相同环境中进行仿真对比实验。山区环境中三种算法的仿真结果如下图所示。
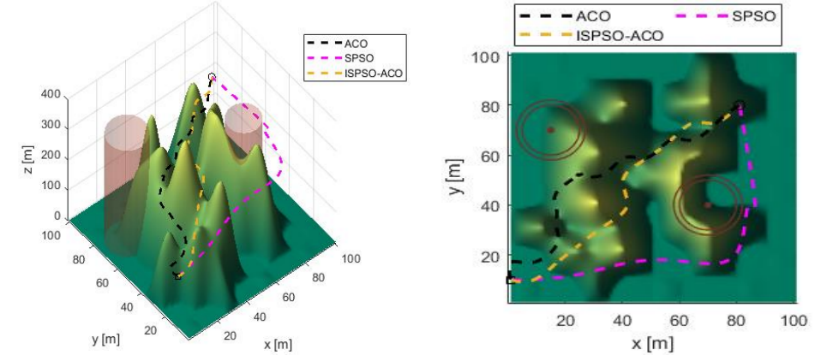
从上图可以看出,虽然三者均能在三维山区任务空间中找到从起始到达终点的安全无碰撞路径,但路径质量存在一定差距。标准蚁群算法路径拐点较多,包含较多不必要的转弯;标准粒子群算法虽找到可行路径,但路线非最优,陷入局部最优,且部分航段距离威胁区较近,增加了飞行风险。综合对比,本案例抗干扰粒子群优化方法规划的路径避免了不必要的弯曲,路线质量较高,与威胁区保持了更安全的距离。
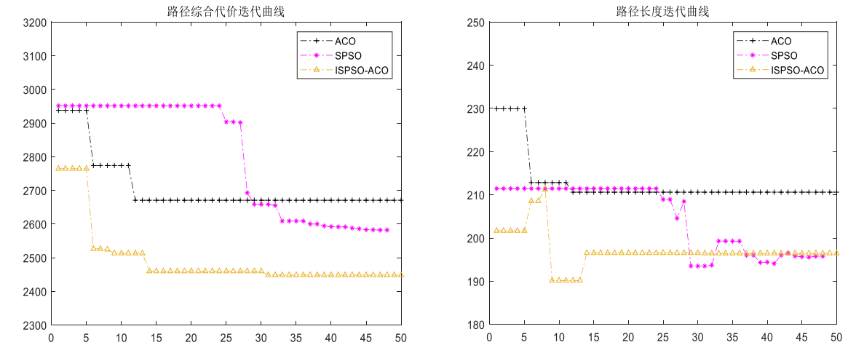
选取综合代价与路径长度作为算法的评估指标。综合代价即为本案例所建立的总体目标函数值。下图展示了三种算法在迭代过程中路径综合代价与路径长度的变化情况。
将本案例抗干扰粒子群优化方法与Q-learning算法在基本城市环境中进行路径规划仿真实验,起点为(6,40,40),终点为(196,150,160),结果如下图所示。
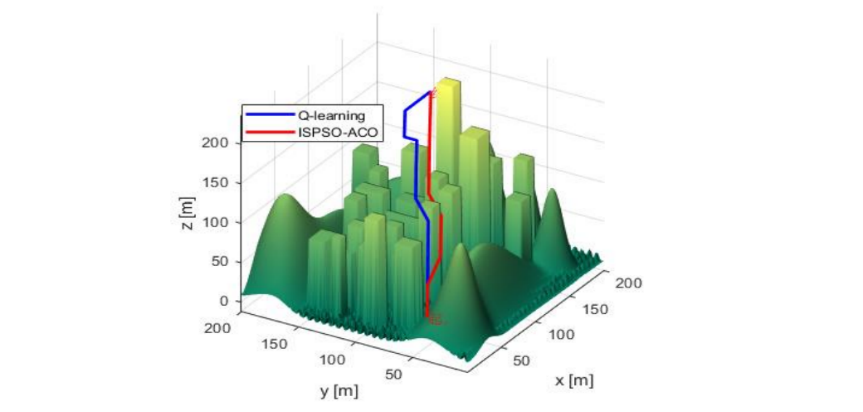
从结果图来看,两种算法均成功避开所有障碍物并找到到达目标点的安全路径。就路径质量而言,本案例抗干扰粒子群优化方法略优于Q-learning算法,且在计算耗时方面优势更为明显。
5 专利转化 成效
相关技术成果已进入实质转化与权属固化阶段。
山东深度森林信息科技有限公司是一家面向高质量专利"挖掘-设计-转化"的技术服务团队。