以 Hadoop 为例,深入理解分布式系统的核心设计
2003 年到 2004 年间,Google 连续发表了三篇论文------GFS (分布式文件系统)、MapReduce (分布式计算框架)、Bigtable(分布式结构化存储)------直接奠定了一个时代的基础设施蓝图。Hadoop 正是这三篇论文的开源实现,至今仍是大数据领域的基石。
本文以 Hadoop 为例,用「写文件」「读文件」「跑一个 MapReduce 作业」「NameNode 故障切换」这四个真实操作,解读背后运转着哪些分布式系统的核心设计------租约机制、管道复制、数据局部性、Shuffle、状态转移、复制状态机、脑裂仲裁------全部串起来。
一、HDFS 架构:GFS 的开源实现
在 Hadoop 生态中,HDFS (Hadoop Distributed File System)负责存储,MapReduce / YARN 负责计算。先看存储层。
1. 核心组件
| 组件 | 角色 | 对应 GFS 概念 |
|---|---|---|
| NameNode | 管理元数据(文件→Block 的映射、Block 所在 DataNode 列表) | GFS Master |
| DataNode | 存储实际数据块,定期向 NameNode 汇报心跳和块信息 | GFS Chunk Server |
| Secondary NameNode | 定期合并编辑日志和文件系统镜像,不是热备(早期版本) | --- |
注意:NameNode 不存储实际数据,也不参与数据读写。客户端向 NameNode 获取 Block 位置后,直接与 DataNode 通信。
2. 文件分块与副本
- Block 大小 :HDFS 默认 128MB(自 Hadoop 2.0 起,GFS 是 64MB)。大块意味着更少的元数据、更少的寻址开销。
- 副本数 :默认 3 个副本 。NameNode 根据机架感知策略决定副本放置位置------当客户端运行在 DataNode 上时,第一个副本直接写入本地节点;否则随机选择一个同机架节点。第二个副本必放在与第一个不同机架 的节点上,第三个副本则放在与第二个副本同一机架的另一个节点上。这种分层策略在写入开销和可靠性间取得了良好平衡:尽快将一个副本送到远程机架以防止机架级故障,同时在远程机架内部再做一次冗余。
为什么不是 5 个或 10 个副本?三个副本是一个经典的平衡点:既能容忍两个节点同时故障,又不至于让存储成本失控。
二、写文件:租约、管道与副本一致性
这是第一个真实操作。假设客户端要向 HDFS 写入一个 300MB 的文件。我们来看背后发生了什么。
1. 整体流程
2. 租约机制(Lease)
在 HDFS 中,租约是 NameNode 授予客户端的一种临时锁,用于保证同一个文件在同一时刻只有一个客户端能够写入。客户端在打开文件进行写入时获得租约(通常 60 秒),并通过定期心跳来续租。若租约过期,NameNode 将收回写入权限并将其授予其他客户端,从而防止客户端崩溃导致的"死锁写入"。
GFS 的传统做法 :GFS 论文中的租约机制略有不同。在 GFS 中,Master 将租约授予某个 Chunk 的一个副本,将其指定为"主副本(Primary)"。主副本负责确定该 Chunk 所有副本的写入顺序,其他副本则听从主副本的协调。这种"指定一个主副本来序列化突变"的设计,保证了即使有多个客户端并发追加,所有副本也能以相同的顺序执行操作。HDFS 没有沿用这种"主副本"租约,而是采用了更简洁的客户端锁方案,将写入控制权完全交给客户端,由客户端根据 NameNode 返回的 DataNode 列表直接建立管道。
3. 管道复制(Pipeline Replication)
数据不是由客户端分别发送给三个 DataNode,而是由客户端按 NameNode 返回的列表顺序建立管道:
客户端 → DataNode 1 → DataNode 2 → DataNode 3这意味着:
- 客户端只消耗一份上行带宽,由 DataNode 之间完成剩余的复制工作。
- 每个 DataNode 收到一个 Packet(默认 64KB),先写入本地,再转发给管道中的下一个节点。
- ACK 沿管道反向回流:DataNode 3 → DataNode 2 → DataNode 1 → 客户端。
这种设计的优势在于:客户端不需要知道副本拓扑,NameNode 在背后做了这些工作;网络负载可以被分散到各 DataNode 之间,而非全部集中在客户端。
4. 一致性问题:部分写入
考虑一种故障场景:Block 正在写入,管道中的 DataNode 3 突然宕机。
- 客户端收到的 ACK 链断裂,感知到写入失败。
- DataNode 1 和 DataNode 2 上已经有了部分数据(可能不完整)。
- 客户端向 NameNode 报告写入失败,NameNode 会:
- 将未完成的 Block 标记为无效。
- 重新分配新的 DataNode 列表(替换掉故障的 DataNode 3)。
- 客户端从新的管道重新写入。
这里有一个设计权衡:保证强一致性的成本过于高昂,HDFS 并不保证副本的强一致性写入,依赖失败重试来最终达到一致。在故障之后的一段时间内,不同 DataNode 上可能存在不一致的数据。
为什么 HDFS 不实现强一致性写入?
要实现所有副本原子的「要么全写入、要么全不写入」,需要更多的通信和IO来保障,例如二阶段提交:
- 一轮 Prepare RPC(询问所有 DataNode 是否就绪)
- 一轮 Commit RPC(确认写入)
- 每次写入至少 2 次网络往返和多次刷盘
对于 HDFS 的典型负载(批量大文件写入、追加写),这种开销是不合理的。HDFS 的假设是:写操作失败的概率很低,重试成本可以接受;并且上层应用(如 MapReduce)的框架本身就在输出阶段做了幂等保证。
三、读文件:数据局部性与机架感知
读文件是 HDFS 最常见的操作。以读取一个 300MB 文件为例:
1. 读取流程
2. 机架感知(Rack Awareness)
NameNode 维护了每个 DataNode 的机架位置信息(通过管理员配置或拓扑脚本获取)。当客户端请求读取某个 Block 时,NameNode 返回的 DataNode 列表按网络距离排序:
| 距离 | 位置关系 | 说明 |
|---|---|---|
| 0 | 同一节点 | 客户端和副本在同一台机器上 |
| 2 | 同一机架 | 跨节点但不跨交换机 |
| 4 | 不同机架 | 跨交换机,延迟最高 |
客户端总是优先访问距离最近的副本,从而最大限度减少跨机架的网络流量。
3. 数据局部性(Data Locality)与 MapReduce 的关联
MapReduce 框架会主动利用数据局部性来消除读取。
当 YARN 调度一个 Map 任务时,它会优先将该任务分配到输入数据所在的节点上执行:
- 如果需要处理的数据在 DataNode A 上,调度器就将 Map 任务发到 DataNode A 所在的机器。
- Map 任务直接读取本地磁盘,完全不需要网络传输。
这意味着:「移动计算,而非移动数据」------代码被送到数据所在的位置,而不是把数据搬到代码所在的位置。Google 在设计 MapReduce 时就发现这是提升性能最有效的手段:一个 Map 任务处理一个 128MB 的本地 Block,磁盘顺序读取可达 100+ MB/s,而如果通过网络读取,受限于交换机带宽,整体吞吐量会急剧下降。
这就是为什么 HDFS 的分块大小(128MB)不是随意设定的------它要足够大,使得 Map 任务的本地计算量足够「值得」调度开销,同时不能太大导致单任务执行时间过长、容错粒度过粗。
四、MapReduce 作业:从提交到完成的全流程
现在进入计算层。以一个经典的 WordCount 作业为例------统计一个 1GB 文本文件中每个单词的出现次数。让我们追踪它从提交到完成的每一步。
1. 作业提交
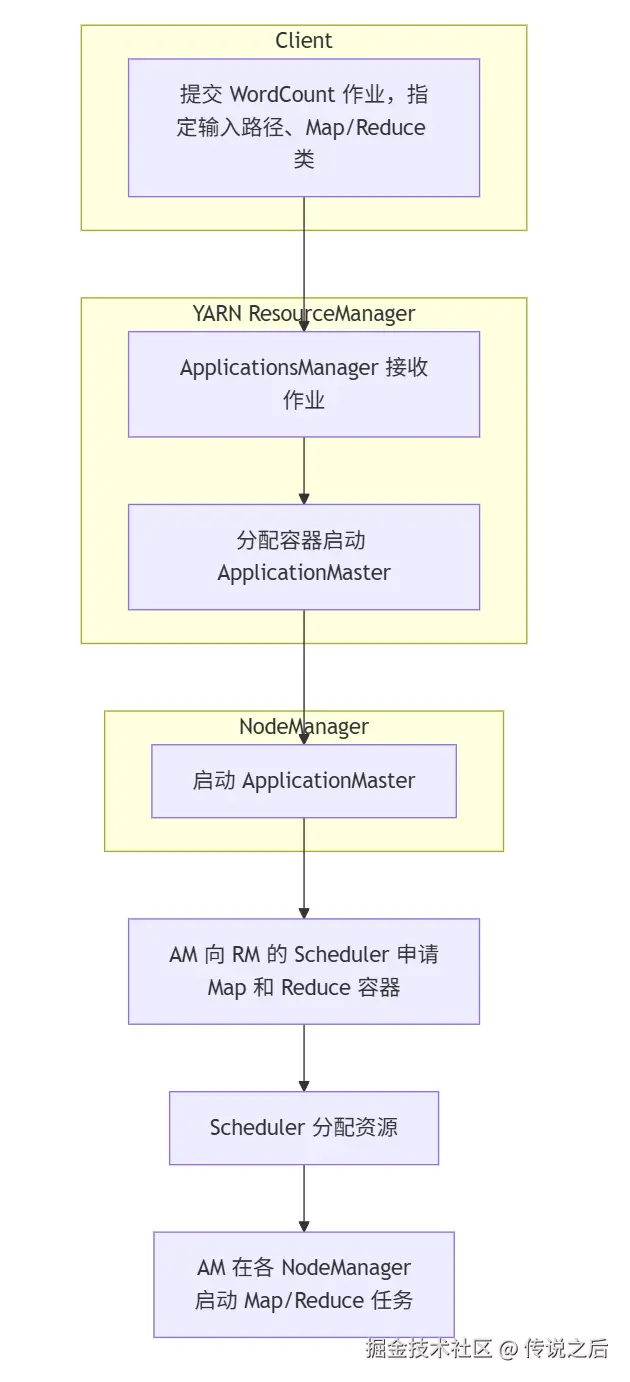
Hadoop 1.x 时代由 JobTracker 统一管理,存在严重的单点瓶颈。Hadoop 2.x 引入 YARN,将资源管理和作业调度分离为 ResourceManager 和 ApplicationMaster,大幅提升了可扩展性。
2. Map 阶段
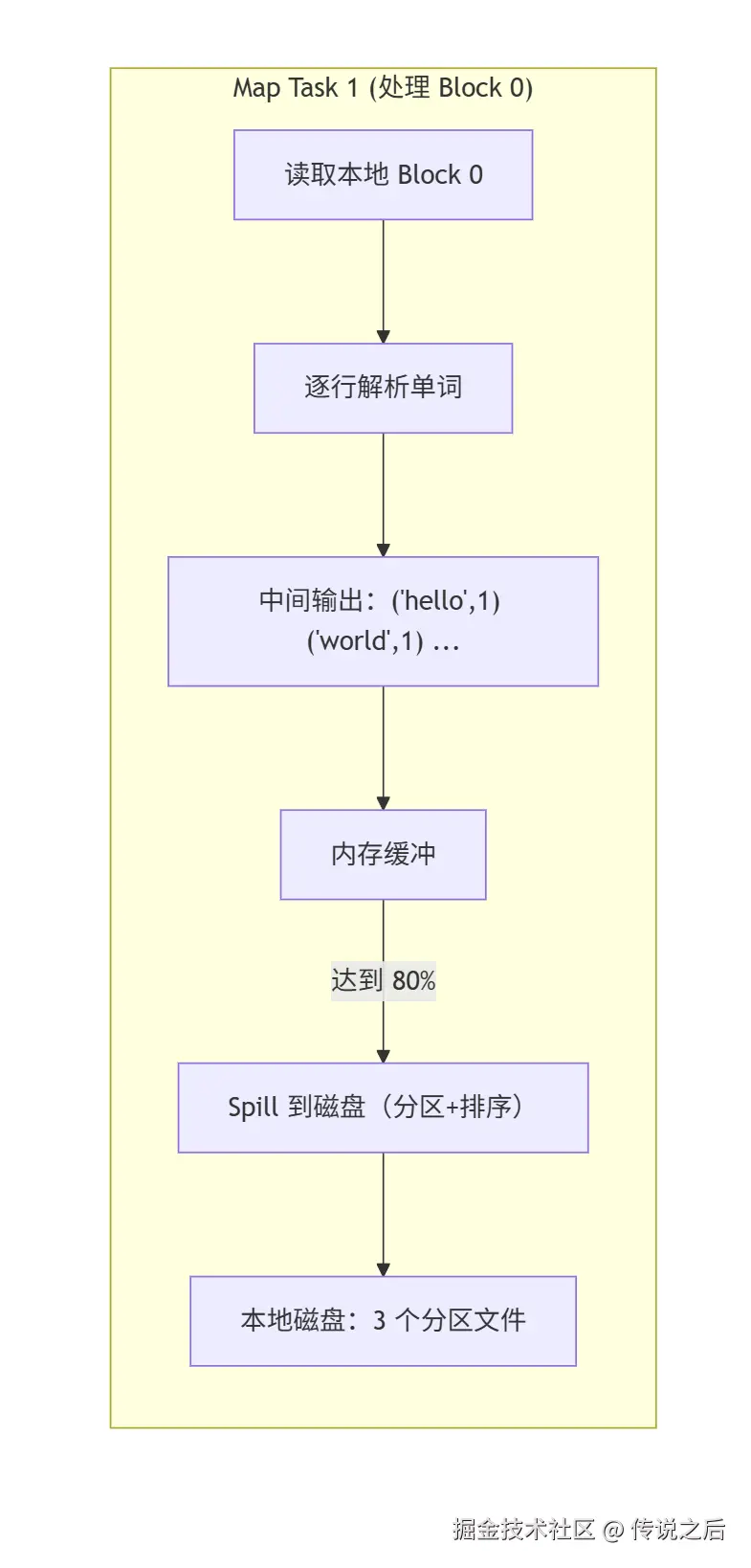
WordCount 的输入文件(1GB)被 HDFS 自动切分为 8 个 128MB 的 Block(假设没有恰好对齐,最后一个 Block 略小),对应 8 个 Map 任务。
每个 Map 任务:
- 读取本地 Block(利用数据局部性,避免网络传输)。
- 按行解析文本,提取每个单词。
- 输出中间键值对:
("hello", 1),("world", 1),("hello", 1)... - 中间结果先缓存在内存缓冲区 (默认由
mapreduce.task.io.sort.mb控制,典型值 100MB),缓冲区达到阈值(80%)后,启动一个后台线程 Spill 到本地磁盘。 - 在 Spill 过程中对数据进行分区 (Partition)和排序(Sort)------按 Reduce 任务数量(假设为 3)取哈希模,将数据切为 3 个分区分别对应 3 个 Reduce 任务。
3. Shuffle 阶段(数据重分布)
Map 任务全部完成后,Reduce 任务进入 Shuffle 阶段------这是整个 MapReduce 流程中最耗网络带宽的环节。
每个 Reduce 任务要从所有 Map 任务的本地磁盘上拉取属于自己的分区数据。假设有 8 个 Map 任务和 3 个 Reduce 任务:
- 每个 Reduce 任务发起 8 次 HTTP 请求。
- 总共 24 次网络传输。
- 如果某个 Map 任务所在的节点宕机,Reduce 任务会感知到连接断开,等待 Map 任务在其他节点上重新执行完成后再拉取。
Shuffle 是 MapReduce 的主要性能瓶颈 。一个 Map 任务可能产生数百 MB 的中间数据,8 个 Map 就是 GB 级别,全部通过网络传输并被 Reduce 端排序、合并。这也是为什么后续的计算框架(如 Spark)试图通过内存缓存中间结果来避免 Shuffle 的磁盘 IO 和网络开销。
4. Reduce 阶段
Reduce 任务将来自所有 Map 的、属于同一 key 的数据合并后执行用户定义的 reduce() 函数:
java
// WordCount 的 Reduce 函数
void reduce(Text key, Iterable<IntWritable> values, Context ctx) {
int sum = 0;
for (IntWritable val : values) {
sum += val.get(); // 对每个单词的 [1,1,1,...] 求和
}
ctx.write(key, new IntWritable(sum)); // ("hello", 156)
}每个 Reduce 任务将最终结果写入 HDFS(生成 part-r-00000、part-r-00001 等文件)。所有这些输出文件的合集就是完整的词频统计结果。
5. 容错:推测执行(Speculative Execution)
如果某个 Map 或 Reduce 任务运行得异常缓慢(可能是所在机器负载高、磁盘故障、网络抖动),由 ApplicationMaster 负责监控任务进度,当检测到明显落后于平均进度的任务时,会在另一个节点上启动一个推测执行副本:在另一个节点上同时运行相同的任务,谁先完成就用谁的结果。
这是一种「宁可浪费计算资源,也不让一个慢节点拖垮整个作业」的乐观冗余策略。它与 GFS/HDFS「依赖重试而非回滚」的设计思路是一样的------在分布式环境下,时间成本被认为是高昂的
五、NameNode 高可用:从状态转移到复制状态机
到目前为止,我们讲的都是「Happy Path」。但分布式系统真正的难点在异常场景------尤其是 NameNode 挂了怎么办。
1. 单点故障的后果
在 Hadoop 1.x 时代,NameNode 是整个集群的单点故障(Single Point of Failure)。一旦 NameNode 宕机:
- 所有客户端无法定位 Block,读写全部中断。
- 所有 DataNode 的心跳和块报告无处可去。
- 恢复方式通常是人工介入------从 Secondary NameNode 合并最新的元数据镜像和编辑日志,耗时数十分钟。
对于一个承载着 PB 级数据、数千台机器的生产集群来说,数十分钟的不可用是不可接受的。
2. NameNode HA 的两种思路
解决单点故障的通用思路是引入备用节点(Standby)。但备用节点如何保持与主节点的状态同步?这就回到了分布式系统中两个最基础的同步范式:
| 范式 | 同步什么 | 网络开销 | 优点 | 缺点 |
|---|---|---|---|---|
| 状态转移(State Transfer) | 主节点定期将完整的内存状态(整个命名空间镜像)拷贝给备用节点 | 大(状态可达几十 GB) | 实现简单 | 拷贝间隔内的增量丢失、网络负担重 |
| 复制状态机(Replicated State Machine) | 主节点将所有「操作」(编辑日志条目)转发给备用节点,备用节点重放 | 小(操作日志远小于完整状态) | 实时性好、网络开销小 | 需要处理非确定性操作 |
就像做操:状态转移是「我拍一张照片发给你,你照着摆姿势」(完整状态快照);复制状态机是「我做一节你模仿一节」(操作序列),只要我们起点相同、动作相同,最终姿态必然相同。
Hadoop 2.x 的 NameNode HA 方案采用的是复制状态机思想------但并非原封不动照搬,而是在此基础上做了工程化改进。
3. NameNode HA 架构:JournalNode 仲裁
核心组件:
- Active NameNode :唯一处理客户端请求的主节点。将所有命名空间操作(创建文件、删除文件、追加写)记录为编辑日志(Edit Log) ,写入一组 JournalNode。
- Standby NameNode :从 JournalNode 持续读取编辑日志,在自己的内存中重放相同的操作,从而保持与 Active NameNode 几乎完全一致 的命名空间状态。注意,Standby 与 Active 之间没有直接的网络通信,所有状态同步都通过 JournalNode 集群中转完成。
- JournalNode(一组奇数个节点):充当编辑日志的可靠存储。Active 写入、Standby 读取。
- ZooKeeper + ZKFC:负责故障检测和自动切换。
4. 为什么是 JournalNode 仲裁而不是 1:1 直连?
如果 Active NameNode 直接向 Standby NameNode 推送日志,存在一个严重问题:
- 如果 Active 发出一条日志后立即崩溃,Standby 可能没有收到。此时发生切换,这条操作就永久丢失了。
- 同时,Active 可能在日志未复制完成时就向客户端返回了成功------一旦崩溃,客户端会认为操作已完成,但 Standby 接管后无法重现该操作。
这就是 VMware FT 论文中讨论的 Output Rule 问题。Hadoop 的解决方案是引入 Quorum(多数派)机制:
Active NameNode 必须将编辑日志写入大多数 JournalNode(Quorum),才认为该操作已提交,才能向客户端返回成功。
假设有 3 个 JournalNode,Quorum 为 2。只要 2 个 JournalNode 存活并记录了日志,即使 Active NameNode 崩溃,Standby NameNode 也能从 Quorum 中读到该日志并重放,不会丢失。
这实质上是将复制状态机 与 Paxos/Raft 的多数派提交做了组合------Active NameNode 是「操作发出者」,JournalNode 集群是「日志的可靠存储」,Standby NameNode 是「状态机副本」。
5. 故障切换(Failover)流程
关键步骤 Fencing(隔离) :切换前必须确保原 Active NameNode 不可能再向 JournalNode 写入日志 。这通过在 JournalNode 上设置一个 epoch number(递增的版本号)来实现:
- 新的 Active 写入时附带更高的 epoch。
- JournalNode 拒绝任何使用旧 epoch 的写入请求。
- 即使原 Active 只是网络隔离而非真的宕机(脑裂场景),它也无法继续写入------保证只有一个写入者。
这与 VMware FT 中的 Test-and-Set(TAS)仲裁 殊途同归。VMware FT 用共享存储上的原子操作来防止脑裂,Hadoop 用 JournalNode 上的 epoch 递增来同理------「谁拿到更新的版本号,谁就是合法的主节点」。本质上都是通过一个外部仲裁者来打破对称性。
六、CAP 在 Hadoop 中的体现
CAP 定理告诉我们,一致性(Consistency)、可用性(Availability)、分区容忍性(Partition Tolerance)三者不可兼得。Hadoop 各组件在这三者之间做出了不同的取舍:
| 组件 | 一致性 | 可用性 | 分区容忍性 | 取舍策略 |
|---|---|---|---|---|
| HDFS 读写 | 弱(最终一致,依赖重试) | 高(多副本确保可读) | (默认 3 副本跨机架) | 牺牲强一致性换取写入吞吐量和可用性 |
| NameNode HA | 强(JournalNode 多数派提交) | 高(自动切换) | (JournalNode Quorum) | 用 Quorum 机制保证元数据一致性,以 Quorum 节点数为代价 |
| MapReduce | 最终一致(输出在作业完成时可见) | 相对高(推测执行兜底) | (任务可在任意节点重跑) | 计算无状态,容错靠重跑 |
Hadoop 对数据层(HDFS 文件内容)选择了最终一致性 ------写失败就重试,副本暂时不一致的代价是可以接受的,因为MapReduce 的输出是幂等的。但是元数据层(NameNode 状态)要求强一致------因为元数据一旦损坏或分裂,整个文件系统将不可用。
七、总结
回顾本文覆盖的四个操作及其背后的分布式知识:
| 操作 | 核心流程 | 背后的分布式设计 |
|---|---|---|
| 写文件 | 客户端获租约→建立管道→ACK 回流 | 客户端租约(防并发写)、管道复制(减客户端压力)、最终一致性(牺牲强一致换吞吐) |
| 读文件 | NameNode 按机架距离排序返回副本列表 | 机架感知(拓扑感知调度)、数据局部性(移动计算而非数据) |
| MapReduce | Map→Shuffle→Reduce,容器由 YARN 调度 | 分而治之、数据局部性、推测执行(乐观冗余)、Shuffle 全互联 |
| NameNode 故障切换 | JournalNode 多数派提交 → Standby 重放 → Fencing → 接管 | 复制状态机、Quorum(多数派)、Fencing(epoch 隔离)、脑裂预防 |
分布式系统的设计,本质上是在故障不可避免的前提下,做出一系列关于「什么该强一致、什么可以最终一致、什么该牺牲来换取什么」的权衡。Hadoop / GFS / MapReduce 这套体系选择了「简单优先、重试兜底」的路径------事实证明,这条路径在批量数据分析领域极为成功。
延伸阅读
- Google:《The Google File System》(2003)------ GFS 论文,HDFS 的设计原型
- Google:《MapReduce: Simplified Data Processing on Large Clusters》(2004)------ MapReduce 论文
- VMware FT:《The Design of a Practical System for Fault-Tolerant Virtual Machines》(2010)------ 状态转移与复制状态机的工程实践
- Hadoop 官方文档:HDFS Architecture、YARN