很多做计算机视觉的同学,常年被困在同一个瓶颈里:看得懂论文,看不懂模型;跑得通Demo,训不好模型;会调用开源代码,却完全不会落地定制。
网上视觉教程五花八门,YOLO检测、语义分割、图像分类的入门资料随处可见,但绝大多数人的学习状态始终停留在"浅层套用"阶段。想深耕前沿的自监督视觉,更是处处碰壁:外文论文晦涩难懂,技术文档碎片化不成体系,网上代码残缺不全、版本冲突严重,跟着教程一步步操作,最后依然报错不断、无法复现。

在学习过程中大多数同学会遇到三道难关:一是搞不懂自监督学习底层逻辑,只会跟风用模型;二是没有完整实战流程,不会从零搭建训练环境;三是不懂模型调优与场景适配,无法落地遥感、工业检测、3D匹配等细分业务。学了很久,始终停留在"会调用、不会创造"的阶段,技术壁垒和核心竞争力完全无法建立。
接下来从几个方面为大家介绍一些学习自监督视觉小窍门,希望可以帮助大家!
01 从"调用模型"到"自主训练",计算机视觉学习逻辑正在重构
过去,多数人学习计算机视觉,就像拿着别人做好的工具包:可以直接调用YOLO做检测、用开源模型做分类,能完成基础任务,但底层原理模糊,模型无法根据业务场景优化,更谈不上自主预训练与微调。面对遥感图像、工业缺陷检测、三维特征匹配等细分场景,通用模型往往效果不足,却不知道该从哪里改进。
DINOv3的出现,跨越了"只会使用、不会训练"的技术鸿沟。作为当下最受关注的自监督视觉模型之一,它凭借无需人工标注、泛化能力强、特征提取精度高的优势,快速成为零样本识别、目标检测、语义分割、3D视觉任务的基础底座。
想象一个普通算法学习者的日常:以往想要训练一个自监督视觉模型,需要翻阅大量外文论文、拼凑零散代码、适配复杂环境,调试数周才能跑通基础流程。
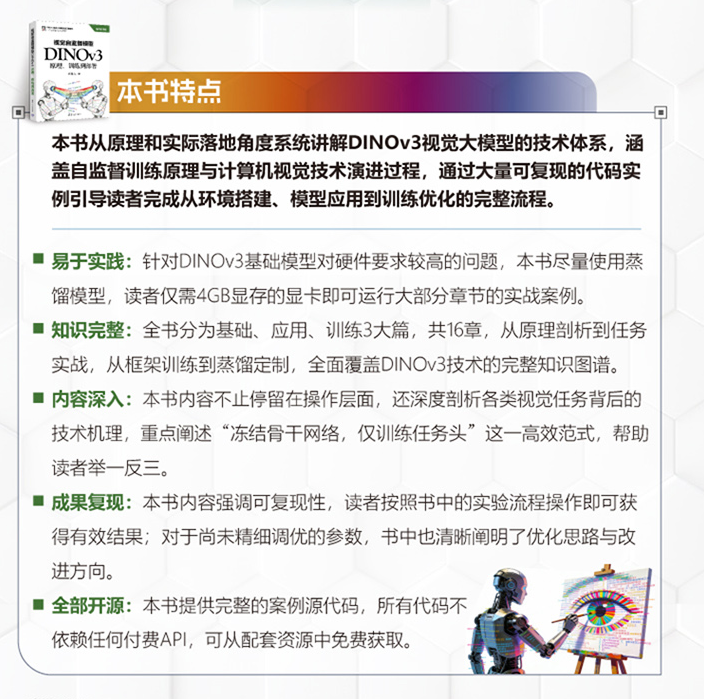
而按照《视觉自监督模型DINOv3:原理、训练到部署》体系化内容学习,从环境搭建、模型调用,到特征提取、下游任务适配,再到自定义数据集训练、知识蒸馏、模型融合,一步步跟着可复现代码实操,普通家用显卡、轻量化服务器即可完成全流程。
这种转变,意味着计算机视觉从业者的能力边界被重新拓宽。我们不再只是被动使用开源工具,而是能够理解模型核心逻辑,根据业务需求自主训练、优化模型,把前沿自监督技术落地到真实项目中。能力提升之外,更深层的变化是技术竞争力的重塑------自监督学习不再是科研人员的专属领域,而是普通开发者也能掌握的核心工程能力。
02 重新定义视觉技术能力:落地与工程化比理论堆砌更重要
随着DINOv3这类自监督模型快速普及,真正拉开从业者差距的,不再是背诵多少网络结构、记住多少理论公式,而是能否把前沿模型落地到真实业务场景,完成从使用到训练、从通用到定制的工程实践。
自监督学习最大的优势,就是摆脱大量人工标注数据的限制,在无标注图像上完成预训练,再迁移到分类、检测、分割、遥感、三维匹配等下游任务。
DINOv3进一步强化了特征一致性、全局建模能力,让模型在小样本、跨领域、零样本任务上表现远超传统模型。借助这套技术,普通开发者也能完成过去只有大厂实验室、高校课题组才能开展的视觉项目,实现小团队、个人开发者的技术突围。
但前沿技术在带来能力提升的同时,也对工程能力提出更高要求。模型训练参数调优、框架适配、硬件资源利用、与YOLO等检测模型融合、知识蒸馏压缩部署,每一个环节都需要扎实的工程经验。如果只懂理论不懂实操,很容易出现模型训练不稳定、特征提取效果差、部署困难等问题。
因此,学习DINOv3不只是掌握一个新模型,更是系统构建自监督视觉完整技术栈,培养理论理解、代码实现、模型调优、项目落地的综合能力。这些工程化、体系化的实战能力,才是未来计算机视觉领域最稀缺、最核心的竞争力。
03 用前沿模型放大能力,而非被动跟风技术热点
很多学习者容易陷入一个误区:一味追逐最新模型,不断下载新开源代码,却不懂底层逻辑,最终只会做简单调用,无法真正掌握技术。其实DINOv3这类自监督模型的价值,在于放大开发者的项目能力,而非替代独立思考与工程实践。
业务场景的需求、数据集的选择、下游任务的适配、模型调优方向,永远需要人来判断;模型只是工具,负责提供强大的特征提取与泛化能力。思路清晰、目标明确,DINOv3就能快速落地为可用的检测、分割、匹配模型;如果盲目跟风技术热点,只跑通简单demo,最终只能停留在浅层应用。理解自监督学习的本质,搞懂DINOv3的核心创新,学会按需定制模型,才能在视觉技术浪潮中站稳脚跟。
《视觉自监督模型DINOv3:原理、训练到部署》正是围绕这一核心逻辑展开,为不同基础的学习者提供全景式学习路径。全书兼顾理论深度与工程落地,详细梳理自监督学习的技术演进,拆解DINOv3的核心创新、训练机制与技术细节;同时配套大量可直接运行的完整代码,降低硬件门槛,让普通学习者不用依赖高端算力,就能完成环境搭建、模型调用、下游任务实战与自定义训练。

全书按照基础、应用、训练三大篇章,搭建完整知识体系,层层递进、干货满满,适配零基础入门、进阶实战、项目落地全场景。
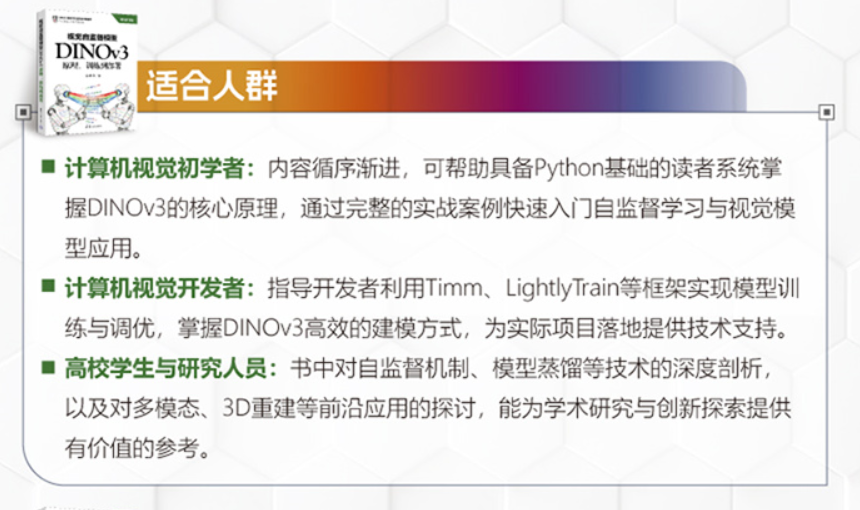
基础篇(第1~3章)作为入门基石,精准解决新手"看不懂原理、配不好环境"的问题。系统讲解自监督学习发展背景、DINOv3核心思想与迭代优势,拆解专属训练机制,手把手指导读者完成全套环境配置,打好理论与实操基础,彻底告别零基础无从下手的困境。
应用篇(第4~9章)聚焦场景落地,主打即学即用、实战变现。结合完整代码与对照实验,逐一讲解DINOv3在核心视觉任务中的落地方法,覆盖特征提取、零样本分类、语义分割、目标检测、特征匹配、3D视觉赋能等主流方向,手把手教读者将模型能力对接各类业务场景。
训练篇(第10~16章)主攻高阶能力,突破普通开发者"不会训、调不好、难定制"的痛点。基于Timm、LightlyTrain等主流框架,详解图像分类、遥感分割、目标检测等多任务完整训练流程,同时延伸知识蒸馏、DINOv3与YOLO模型融合、模型轻量化调优、自定义数据集训练等进阶实战,帮助读者搭建从模型使用、参数调优到专属模型定制的完整技术闭环。
同时,书中理性分析自监督模型的泛化边界、训练难点、落地bug与优化方案,清晰界定技术应用场景与边界,引导学习者结合业务需求合理调优、高效落地。本书始终强调:技术模型越强大,开发者的场景判断力、工程落地能力、问题解决能力就越重要。学会驾驭前沿视觉模型,搭建属于自己的技术体系,是面向未来的关键能力。
在视觉技术快速迭代的当下,选对学习路径,吃透前沿自监督模型,就能在技术浪潮中稳步前行。
本文部分内容摘自《视觉自监督模型DINOv3:原理、训练到部署》,具体内容请以书籍为准。