三、模糊控制器的设计举例
1、流量控制的模糊控制器设计
(1)模糊化过程:
选择输入量为误差(以e表示)和误差变化(以de表示),控制器的输出为阀门流量的校正量(以u表示)
把误差划分成"负大"、"负小"、"零"、"正小"、"正大"五个等级------语言变量的语言值
把输出量,即阀门的开关的状态划分为"关"、"半开"、"中等"、"开"四个等级
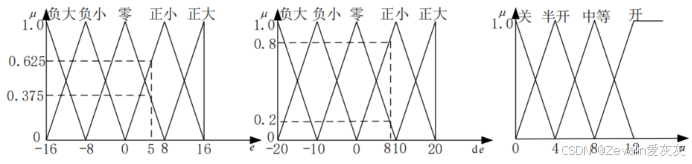
选择模糊隶属函数如下图所示
(2)模糊控制规则的建立:
根据专家经验建立模糊控制规则,这里有5*5=25条(输入量的不同组合)规则,以下列出其中两条
规则1:如果(IF)误差为零,或者(OR)误差变化为正小,则(THEN)阀门半开
规则2:如果(IF)误差为正小,或者(OR)误差变化为正小,则(THEN)阀门中等
(3)精确化计算:
使用重心法计算出模糊控制输出的精确量
(4)模糊控制器的运行举例:
①假定系统误差e的量化值为5,误差变化de的量化值为8。
②模糊化过程:
由隶属度函数图可以得到:
误差属于"零"的程度即隶属度为0.375,属于"正小"的程度为0.625
误差变化属于"零"的程度即隶属度为0.2,属于"正小"的程度为0.8
③模糊逻辑推理:
④精确化计算:
由"削顶"推理法,可得阀门流量的隶属度函数图
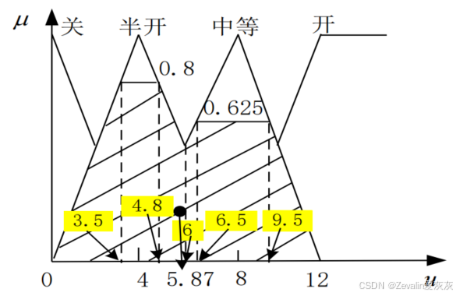
选择重心法计算,首先得到图中的各拐点的坐标(0,0)、(3.5,0.8)、(4.8,0.8)、(6,0.5)、(6.5,0.625)、(9.5,0.625)、(12,0),套用精确化过程重心计算法积分公式,得到
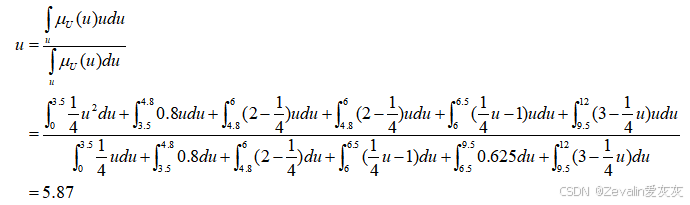
即阀门的确切开度为5.87
2、直流调速系统的模糊控制器设计
(1)模糊化过程:
讨论由晶闸管控制的直流电动机,由直流传动驱动模块可知,此对象为一个纯延时的惯性环节
设传递函数已知,要求设计一个模糊控制器,对此调速系统进行控制,允许转速误差为
控制输入量为误差和误差变化
,控制输出增量为
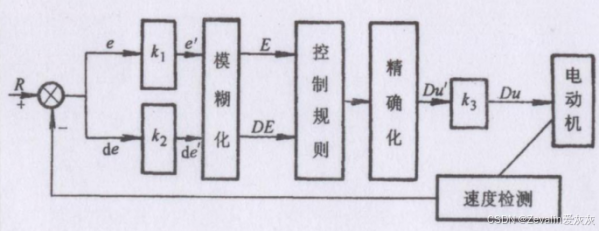
由于对系统控制精度要求不高,允许有一定的误差裕度,所以误差变量可以取两个语言值------负偏差(NZ)、正偏差(PZ),误差变化变量也取两个语言值------负偏差变化率(NZ)、正偏差变化率(PZ),控制量取三个语言值------正增量(PS)、零增量(ZE)、负增量(NS)
三者的隶属度函数如下图所示

(2)模糊控制规则的建立:
根据专家经验建立模糊控制规则,这里有2*2=4条规则(输入量的不同组合),以下列出其中两条
规则1:如果(IF)误差为NZ,且(AND)误差变化为NZ,则(THEN)控制输出增量为ZE
规则2:如果(IF)误差为NZ,且(AND)误差变化为PZ,则(THEN)控制输出增量为NS
规则3:如果(IF)误差为PZ,且(AND)误差变化为NZ,则(THEN)控制输出增量为PS
规则4:如果(IF)误差为PZ,且(AND)误差变化为PZ,则(THEN)控制输出增量为ZE
(3)精确化计算:
使用重心法计算出模糊控制输出的精确量
(4)模糊控制器的运行举例:
①假定系统误差的量化值为3,误差变化
的量化值为1。
②模糊化过程及模糊逻辑推理:
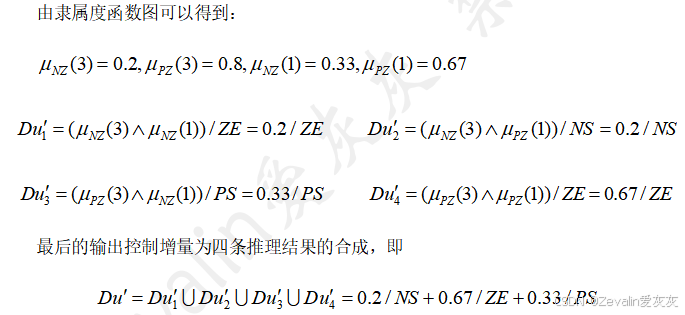
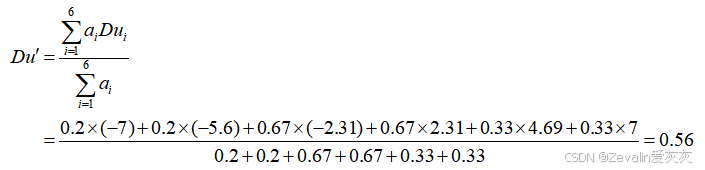
③精确化计算:
由隶属度函数图及"削顶"法得到拐点
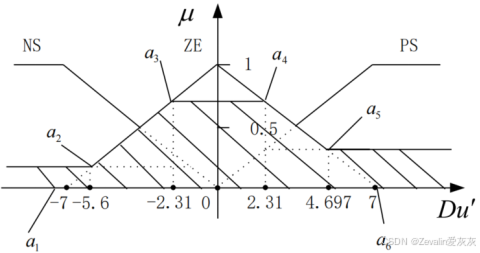
选择重心法计算,首先得到图中的各拐点的坐标(-7,0.2)、(-5.6,0.2)、(-2.31,0.67)、(2.31,0.67)、(4.69,0.33)、(7,0.33),套用精确化过程重心计算法求和公式,得到
四、模糊PID控制器的设计
1、常规PID回顾
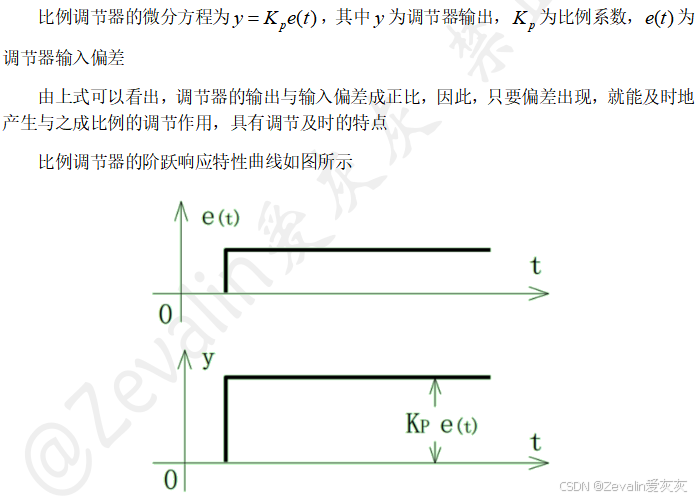
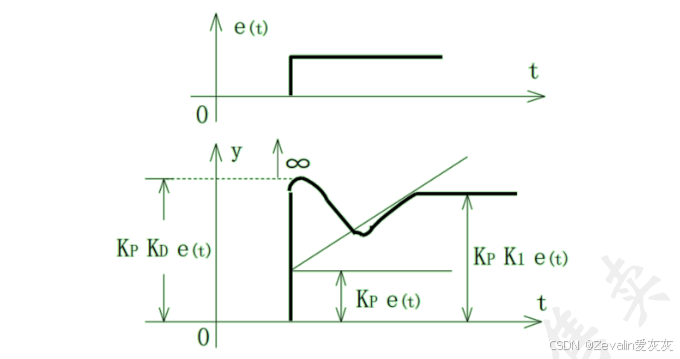
(1)比例调节器:
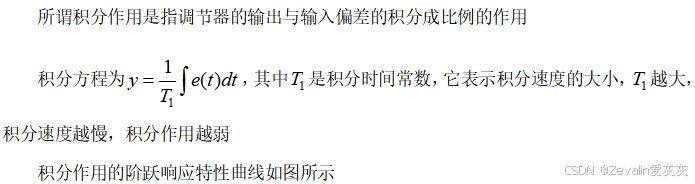
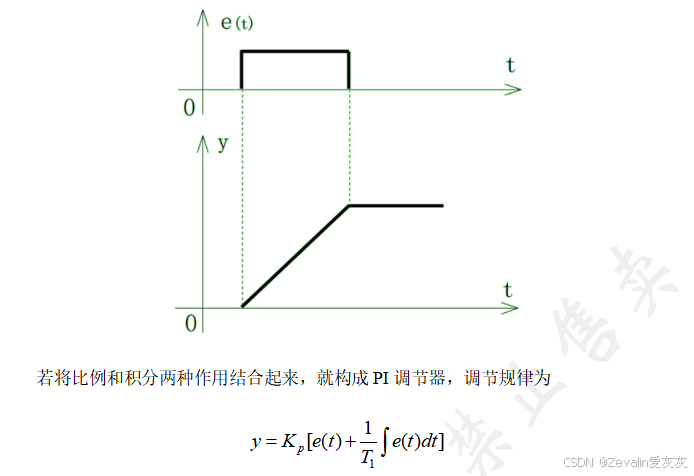
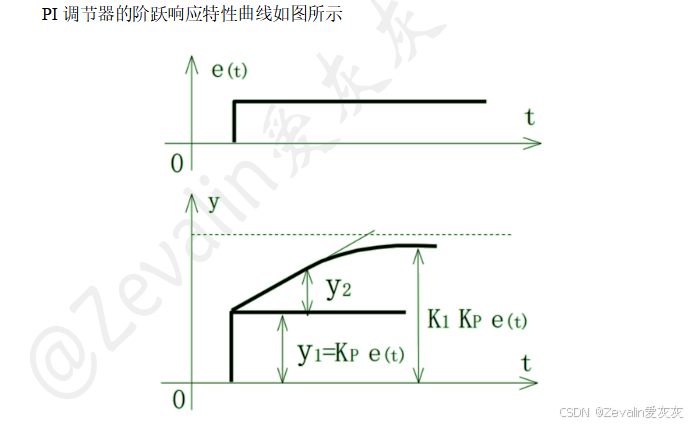
(2)比例积分调节器:
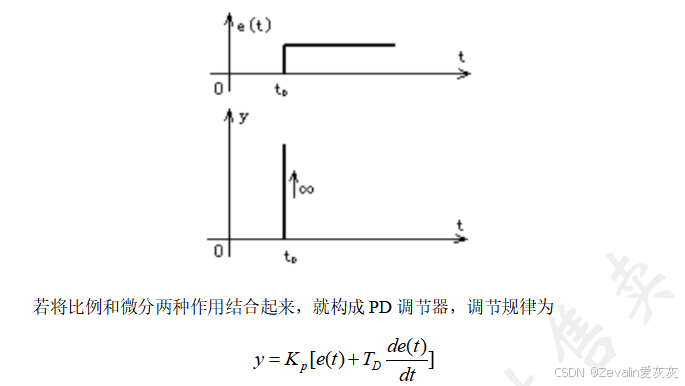
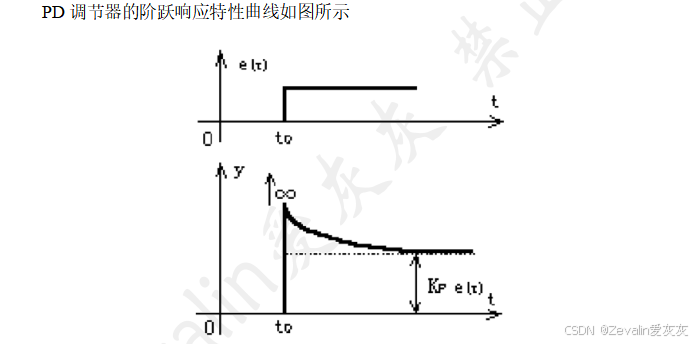
(3)比例微分调节器:

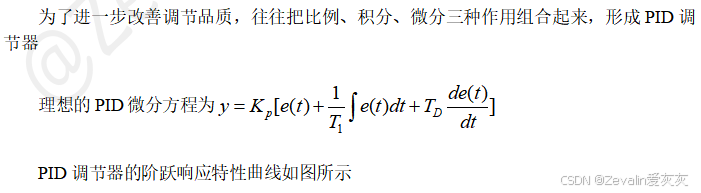
(4)比例积分微分调节器:
2、模糊控制器和常规PID的混合结构
(1)常规PID的缺点:
①只有一组固定的参数,很难适应非线性、时变、强干扰的被控对象。
②常规PID中,超调、震荡、响应速度,很难同时兼顾,而模糊控制的优势是不依赖精确模型、鲁棒性强,但它的稳态精度不如PID。
(2)模糊控制器和常规PID控制器可以并联使用,在论域内用不同的控制方式分段实现控制,形成混合结构。
(3)常见的混合结构:
①分段控制:
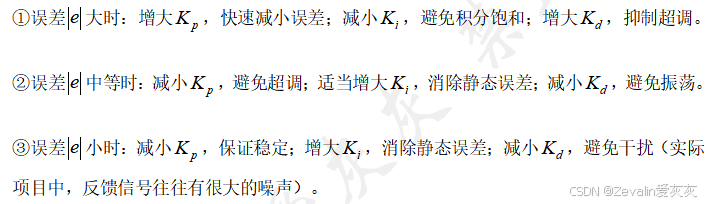
大误差时,用模糊控制快速拉回误差;小误差时,切换到常规PID控制,消除静态误差,保证稳态精度
②模糊PD+精确积分:

③模糊PD+模糊PI:

3、常规PID参数的模糊自整定技术
(1)基于常规PID控制器,利用模糊控制规则在线对PID参数进行修改,便构成了参数模糊自整定PID控制器。
(2)设计步骤:
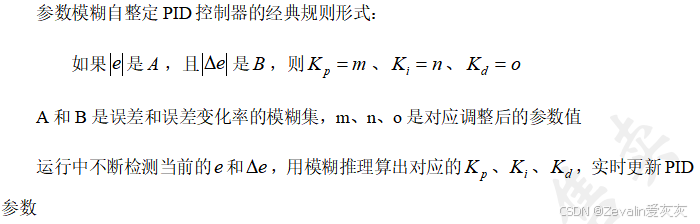
(3)参数调整的经验逻辑: