一、模糊控制系统的组成
1、模糊控制系统概述
(1)模糊控制系统是一种自动控制系统,它是以模糊数学、模糊语言形式的知识表示和模糊逻辑推理为理论基础,采用计算机控制技术构成的一种具有闭环结构的数字控制系统。
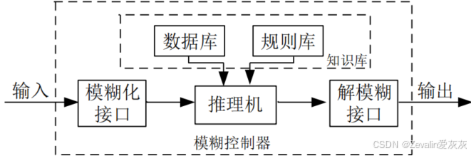
(2)模糊控制系统的主要部件有------模糊化过程(接口)、知识库(包含数据库和规则库)、推理决策、精确化计算(接口)。
(3)模糊控制器的三个功能:
①把系统的偏差从数字量转化为模糊量(模糊化过程、数据库完成)。
②对模糊量由给定的规则进行模糊推理(规则库、推理决策逻辑完成)。
③把推理结果的模糊输出量转化为实际系统能够接受的精确数字量或模拟量(精确化过程完成)。
2、模糊化过程
(1)模糊化过程主要完成:测量输入变量的值,并将数字表示形式的输入量转化为通常用语言值表示的某一限定码的序列(表示论域内的一个模糊子集,并由隶属度函数定义)。
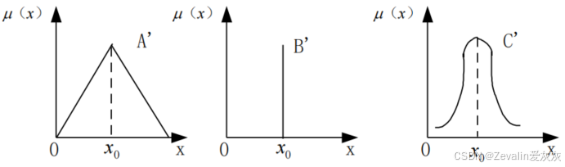
(2)常用的三种模糊化函数有单点模糊化、三角形函数和高斯函数,其中单点模糊化只是形式上将清晰量变成了模糊量。
3、知识库
(1)知识库分为数据库和规则库:
①数据库(KB-Knowledge Base)存放的是所有输入、输出变量的全部模糊子集的隶属度矢量值或隶属度函数,因此它涉及量化等级的选择、量化方式、比例因子、模糊子集的隶属度函数等。
②规则库(RB-Rule Base)存放全部模糊控制规则,用一系列模糊条件描述的模糊控制规则就构成模糊控制规则库。
(2)数据库中的隶属度函数:
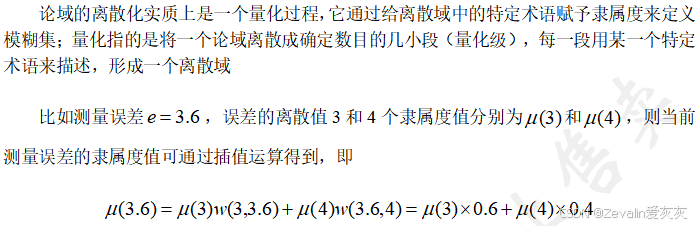
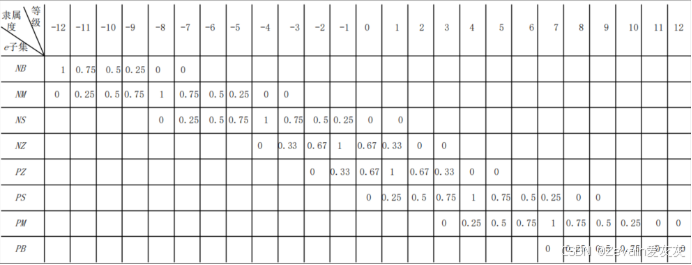
①论域的离散化:
②输入输出空间的模糊划分:
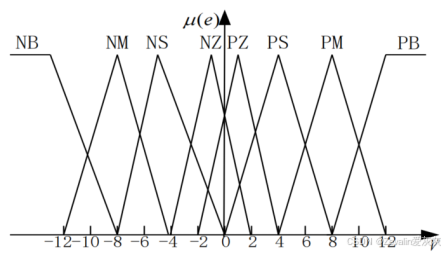
③选取基本模糊子集的隶属度函数:
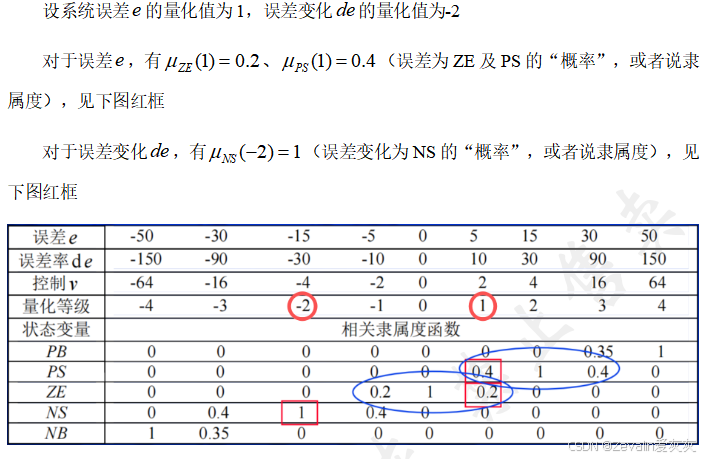
数字表示,适用于论域是离散的情况,如下图所示
函数表示,适用于论域是连续的情况,隶属度函数的形状主要为三角形、梯形或高斯形
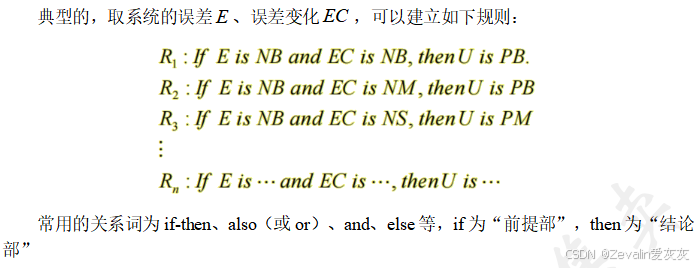
(3)模糊控制规则的建立:
①专家经验法:通过对专家控制经验的咨询形成控制规则库。
②观察法:通过观察人类控制行为并将其控制的思想提炼出一套基于模糊条件语言类型的控制规则,从而建立模糊规则库,通过现场控制专家和熟练操作工实际操作来建立操作模型。
③基于模糊模型的控制:
该方法也叫逆推法,先建对象模型,再反推控制规则,主要分为两步进行:
④自组织法:
随着环境的变化或经验的丰富,更新原有的控制规则以获得更佳的控制效果,有自学习和自适应的性能
自组织模糊控制器能够在没有先验知识和很少有先验知识的情况下,通过对观察系统的输入输出关系建立控制规则库
4、推理决策逻辑
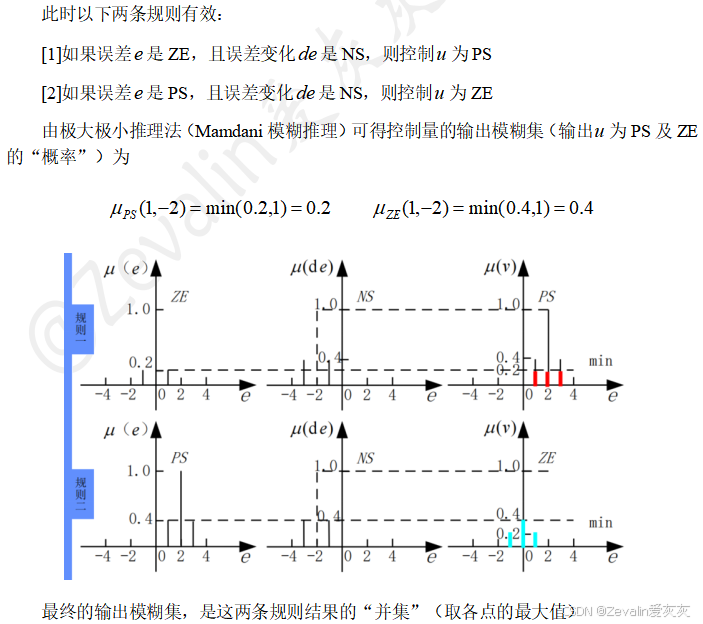
推理决策逻辑是模糊控制的核心,它利用知识库的信息模拟人类的推理决策过程,给出适合的控制量
5、精确化过程
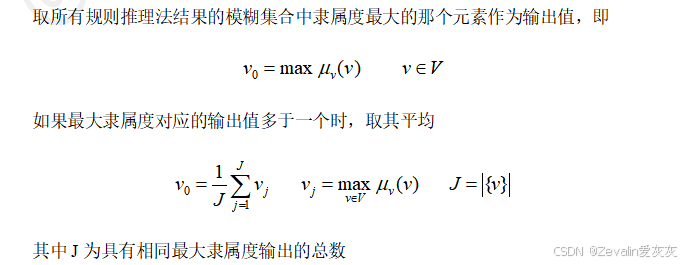
(1)最大隶属度函数法求最终输出值:
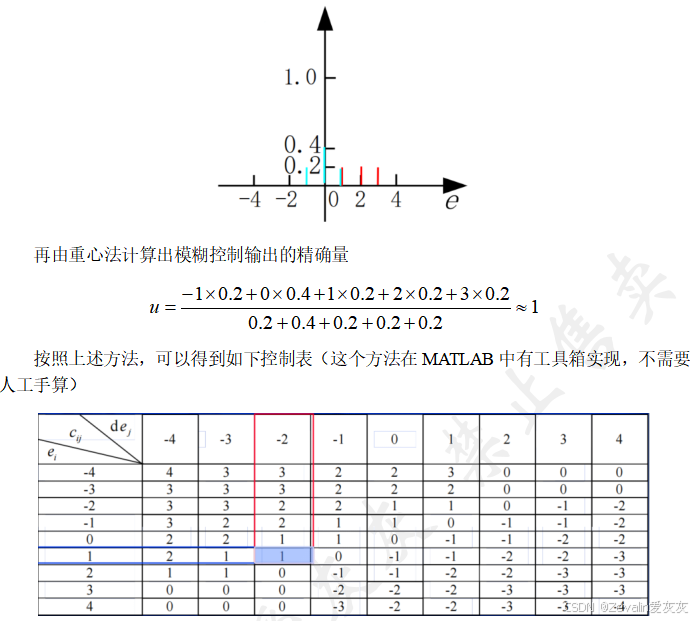
(2)重心法求最终输出值:
取模糊隶属度函数曲线与横坐标围成面积的重心为最终输出值

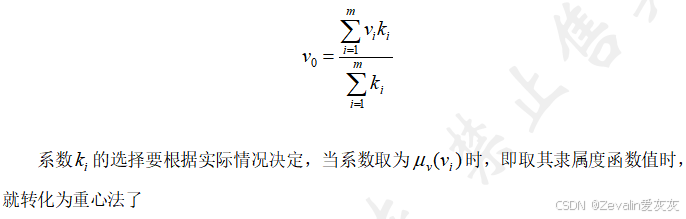
(3)加权平均法求最终输出值:
最终输出值由下式决定
二、模糊控制系统的设计
1、模糊控制器的结构设计
(1)所谓模糊控制器的结构是指输入输出变量、模糊化算法、模糊推理规则和精确化计算方法。单输入-单输出模糊控制结构指的是被控对象是单输入-单输出系统,而多维模糊控制器指的是模糊逻辑控制器条件部中语言变量的多少。
(2)单输入-单输出模糊控制结构:
①一维模糊控制器:
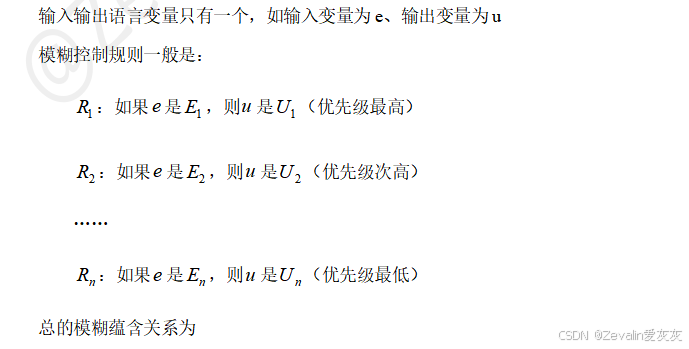

②二维模糊控制器:
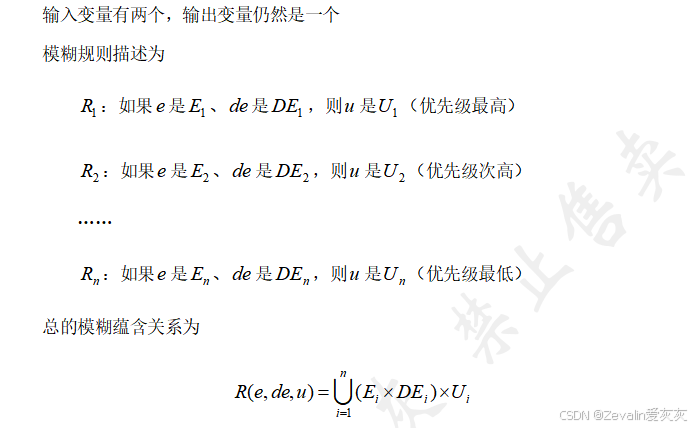
③多维模糊控制器:
输入变量有多个,输出变量仍然是一个
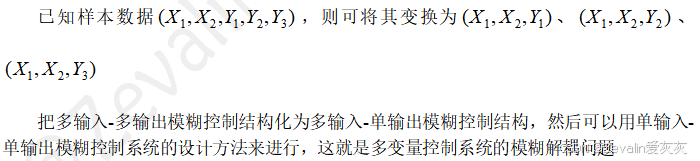
(3)多输入-多输出模糊控制结构:
2、模糊控制器的设计原则和常规设计方法
(1)模糊控制器的工作过程:
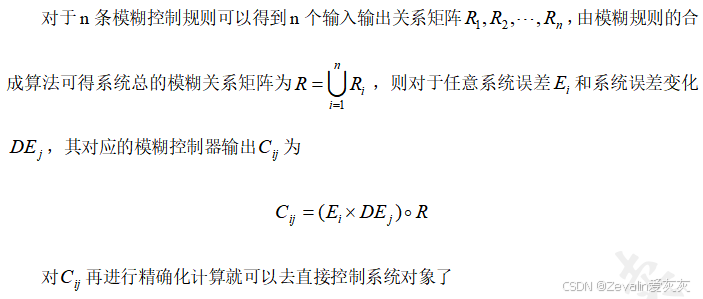
假定模糊控制器的输入量为系统的误差e和误差变化de,输出量为系统控制值u,则模糊控制器的工作过程可以描述为:首先将模糊控制器的输入量转化为模糊量,供模糊逻辑决策系统用,模糊逻辑决策器根据控制规则决定的模糊关系R,应用模糊逻辑推理算法得出控制器的模糊输出控制量,最后经精确化计算得到精确的控制值去控制被控对象

(2)设计模糊控制器需要考虑的步骤:定义输入输出变量、定义所有变量的模糊化条件、设计控制规则库、设计模糊推理结构、选择精确化策略的方法。
(3)查表法:
①查表法的基本思想是通过离线计算取得一个模糊控制表,在模糊控制器进行工作时,计算机只需直接根据采样的误差和误差变化的量化值来找出当前时刻的控制输出量化值,再乘以比例因子得到最终的输出控制量。以下以加热炉的温度控制系统为例进行查表法的设计过程介绍。
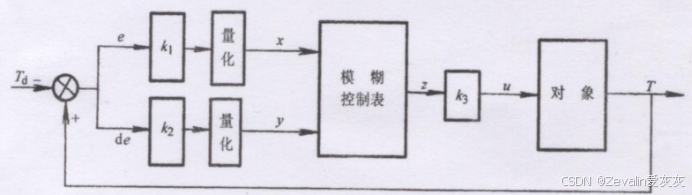
②确定模糊控制器的输入输出变量:

③确定输入、输出变量的论域,以及量化等级和量化因子:
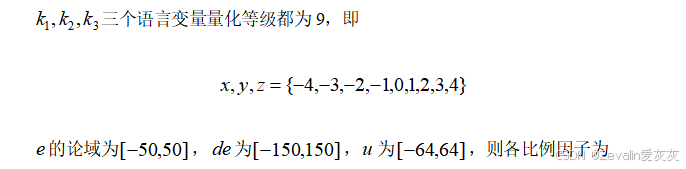

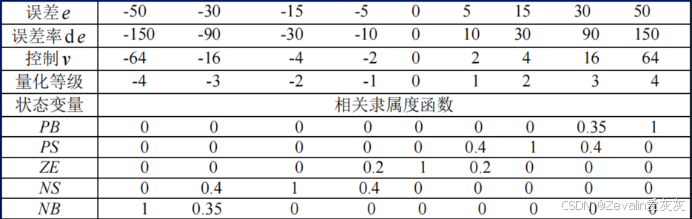
④在各输入输出语言变量的量化域内定义模糊集:
首先确定各语言变量论域内都取5个模糊子集,即:PB、PS、ZE、NS、NB
各语言变量模糊子集通过隶属度函数定义,量化方式采用了非线性量化以提高稳态点控制精度
以下为模糊集的隶属度函数
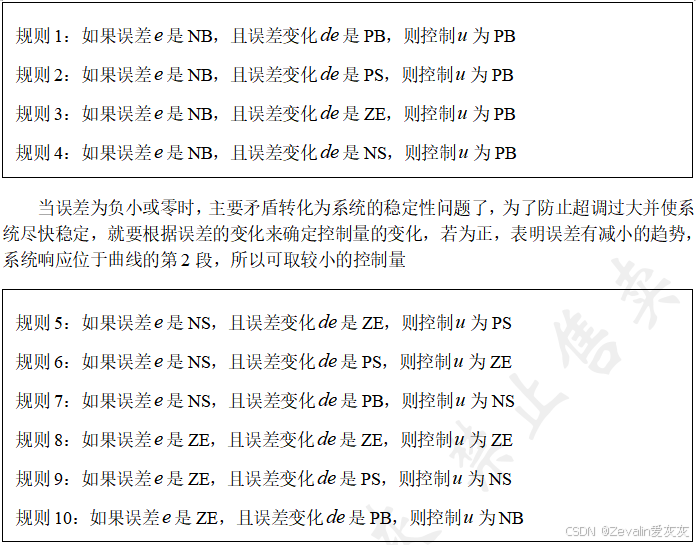
⑤模糊控制规则的确定:
模糊控制规则实质是将操作员的控制经验加以总结,而得出一条条模糊条件语句的集合
确定模糊控制规则的原则是必须保证控制器的输出能够使系统输出响应的动静态特性达到最佳
设控制系统的响应曲线如下图所示
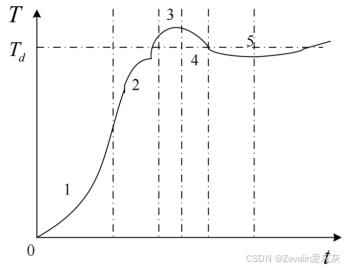

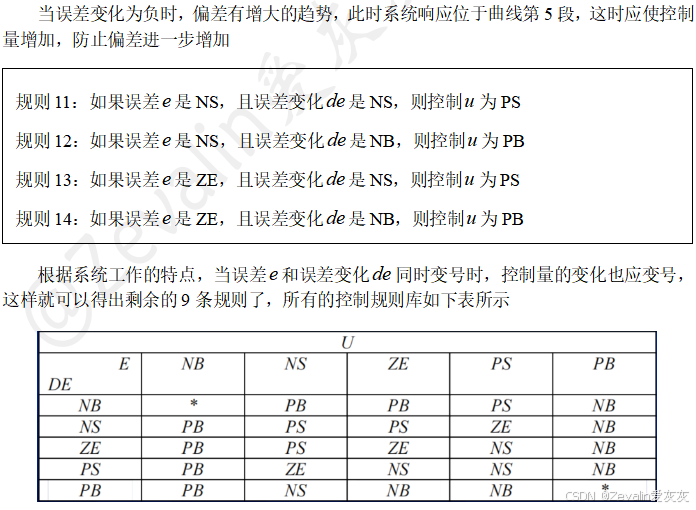
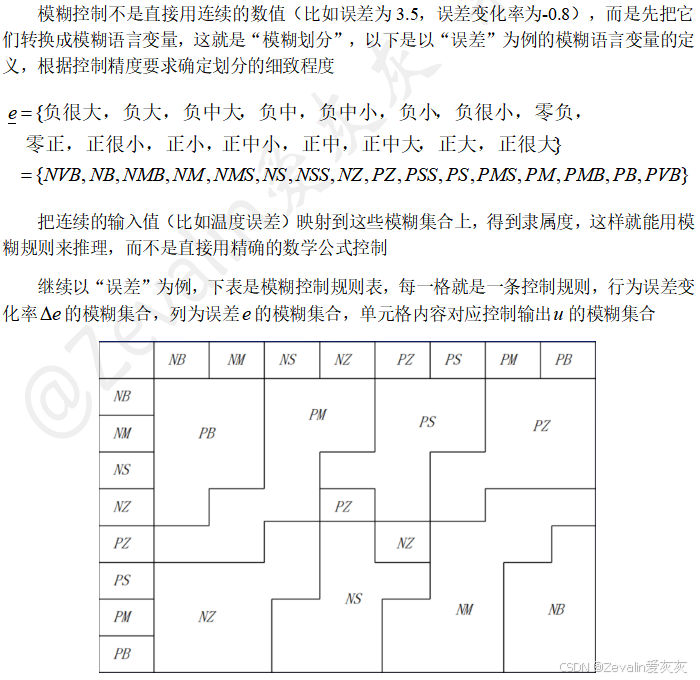
⑥求模糊控制表:
模糊控制规则表必须对所有输入语言变量(如误差、误差变化)量化后的各种组合通过模糊逻辑推理的一套方法离线计算出每一个状态的模糊控制器输出,最终生成一张模糊控制表