光学基础
一、量化评估指标
1. MTF(Modulation Transfer Function 调制传递函数)
评估维度:不同分辨率下的对比度保留比例。
计算方式:
- Y值:输出对比度/输入对比度
- X值:测试对象的分辨率
分辨率计算方法:pl/mm,每毫米线对数。
对比度计算方法:lmax−lminlmax+lmin\frac{l_{max}-l_{min}}{l_{max}+l_{min}}lmax+lminlmax−lmin,lll表示亮度。
变化规律:
- 空间分辨率越高,对比度越低。
- 视场位置越边缘,对比度越低。
举例:
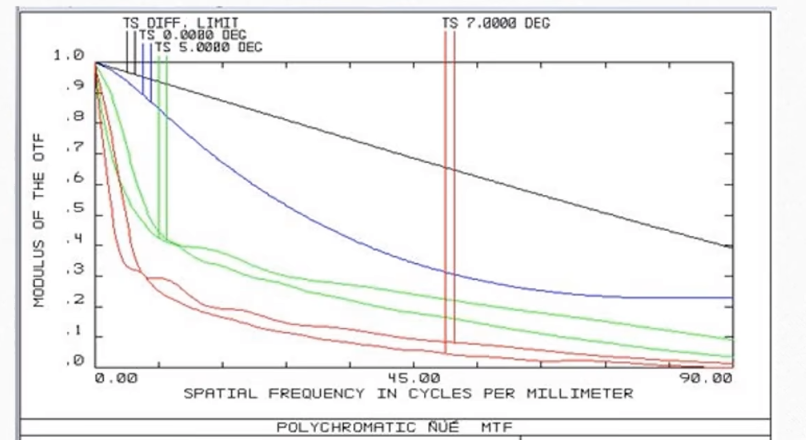
横轴空间分辨率,纵轴对比度保留比例。黑线中心视场,红线边缘视场。
硬件瓶颈:能够测到的空间频率上限是像素数量2∗传感器高度lp/mm\frac{像素数量}{2 * 传感器高度} lp/mm2∗传感器高度像素数量lp/mm,因此只需关注小于上限频率的MTF函数。
2. LW/PH(Line Widths per Picture Height,即"每像高线宽")
评估维度:整个图像高度的范围内,可以清晰分辨的、交替的黑白线条的数量。表示最终成像解析力。
计算方式:
LW/PH=2×镜头lp/mm×传感器高度(mm)LW/PH = 2 × 镜头lp/mm × 传感器高度 (mm)LW/PH=2×镜头lp/mm×传感器高度(mm)
镜头lp/mm取MTF50时的线对数
变化规律:
- 镜头MTF越好,LW/PH越高。
- 传感器高度越大,LW/PH越高。
硬件上限:
LW/PH上限是像素数量。
其他
 举例
举例
- 灯:光强度是 100 cd。
- 灯光照到一本书上:书表面接收到的照度是 500 lx(取决于距离和角度)。
- 人看这本书:书页反射光进入眼睛,它的亮度是 50 cd/m²(取决于纸张反射率)。
相机传感器记录的就是场景中各个点的亮度。