文章目录
- 一、微分平坦定义
- 二、轮式底盘的微分平坦
-
- [1. 轮式底盘的微分平坦推导准备](#1. 轮式底盘的微分平坦推导准备)
- [2. 轮式底盘的微分平坦推导](#2. 轮式底盘的微分平坦推导)
- 三、轨迹生成
-
- [1. 轨迹生成步骤如下](#1. 轨迹生成步骤如下)
第一步,先摆上霍普金斯的关于 微分平坦的讲义 。
一、微分平坦定义
控制非线性系统到达目标状态通常分为两步:第一步是轨迹生成 ,第二步是利用反馈进行轨迹跟踪 。根据可用算力,轨迹生成可低频重规划,而跟踪控制则以接近传感器频率运行 。两步法的关键优势在于:轨迹生成时可直接考虑系统动力学、输入约束等限制,并优化性能指标。因此即使系统因不确定性偏离路径,整体性能仍接近最优。
1.1 基本定义
有一类系统的轨迹生成特别简单,被称为微分平坦系统 。
若一个系统能找到一组输出(维度与输入相等) ,使得无需对系统积分 就能由这组输出完全确定整个状态与控制输入 ,则该系统是微分平坦的。
更形式化地:
状态 x ∈ R n x∈ℝ^n x∈Rn、输入 u ∈ R m u∈ℝ^m u∈Rm 的系统,若存在输出 y ∈ R m y∈ℝ^m y∈Rm
y = h ( x , u , u ˙ , ... , u ( a ) ) y=h(x,u,\dot u,...,u^{(a)}) y=h(x,u,u˙,...,u(a))
使得
x = φ ( y , y ˙ , ... , y ( b ) ) u = α ( y , y ˙ , ... , y ( c ) ) \begin{aligned} x=φ(y,\dot y,...,y^{(b)}) \\ u=α(y,\dot y,...,y^{(c)}) \end{aligned} x=φ(y,y˙,...,y(b))u=α(y,y˙,...,y(c))
则称系统微分平坦。坐标 y y y 称为平坦输出。
二、轮式底盘的微分平坦
微分平坦的关键判定(满足就是平坦);
- 平坦输出维度 = 控制输入维度(都是 2);
- 全部状态 可由 y 及其导数 唯一确定;
- 全部控制量 可由 y 及其导数 唯一计算;
- 不需要积分动力学方程;
轮式移动机器人是微分平坦系统,平坦输出为: y = x 1 , x 2 y=x_1,x_2 y=x1,x2 完美满足,所以是最经典、最常用的微分平坦系统。
1. 轮式底盘的微分平坦推导准备
1.1 机器人状态(3 个)
x = x 1 x 2 x 3 = x y θ \bold x= \left \\begin{matrix} x_1\\\\ x_2 \\\\ x_3 \\end{matrix} \\right = \left \\begin{matrix} x\\\\ y \\\\ \\theta \\end{matrix} \\right x= x1x2x3 = xyθ
1.2 控制输入(2 个)
u = v ω \bold u= \left \\begin{matrix} v\\\\ \\omega \\end{matrix} \\right u=vω
1.3 运动学模型
{ x ˙ 1 = v ⋅ c o s θ x ˙ 2 = v ⋅ s i n θ x ˙ 3 = θ ˙ = ω \left\{ \begin{array}{l} \dot x_1 &= v \cdot cos\theta \\ \dot x_2 &= v \cdot sin\theta\\ \dot x_3 &= \dot \theta = \omega \ \end{array} \right . ⎩ ⎨ ⎧x˙1x˙2x˙3=v⋅cosθ=v⋅sinθ=θ˙=ω
2. 轮式底盘的微分平坦推导
如何用平坦输出 y 算出所有状态?
2.1 航向角 θ 的计算
θ = a r c t a n 2 ( x ˙ 2 , x ˙ 1 ) + k π , k = 0 , 1 θ=arctan2(\dot x_2, \dot x_1)+kπ, \quad k=0,1 θ=arctan2(x˙2,x˙1)+kπ,k=0,1
其中:
- k=0:机器人前进
- k=1:机器人后退
由此,可知:只要知道位置轨迹 x ( t ) , y ( t ) x (t), y (t) x(t),y(t),就能直接算出朝向!
进一步,想算出机器人全部状态 ( x , y , θ ) (x,y,θ) (x,y,θ),只需要平坦输出 y 到 1 阶导数(位置 + 速度), 即,状态依赖平坦输出的1 阶导数:b=1
2.2 线速度 v v v
v = ± x ˙ 1 2 + x ˙ 2 2 v=±\sqrt{\dot x_1^2+\dot x_2^2} v=±x˙12+x˙22
其中:
- 正:前进
- 负:后退
2.3 角速度 ω
ω = θ ˙ = x ¨ 1 x ˙ 2 − x ˙ 1 x ¨ 2 x ˙ 1 2 + x ˙ 2 2 ω=\dotθ=\frac{\ddot x_1 \dot {x}_2−\dot x_1 \ddot {x}_2}{\dot x_1^2+\dot x_2^2} ω=θ˙=x˙12+x˙22x¨1x˙2−x˙1x¨2
可知,想算出控制输入 ( v , ω ) (v,ω) (v,ω),需要平坦输出 y y y 到 2 阶导数(位置 + 速度 + 加速度),即,控制依赖平坦输出的2 阶导数:c=2
总结:轮式机器人平坦系统的阶数:
- 状态依赖平坦输出的1 阶导数:b=1
- 控制依赖平坦输出的2 阶导数:c=2
故,给定任意光滑的位置轨迹 y ( t ) = x ( t ) , y ( t ) T y (t) = x (t), y (t)^T y(t)=x(t),y(t)T,可以直接算出:
- 航向角 θ ( t ) θ(t) θ(t)
- 线速度 v ( t ) v (t) v(t)
- 角速度 ω ( t ) ω(t) ω(t)
- 整个状态轨迹 x , y , θ T x,y,θ^T x,y,θT
完全不需要解微分方程、不需要积分、不需要优化 !这就是微分平坦的威力。
三、轨迹生成
现在使用微分平坦输出做轨迹。
1. 轨迹生成步骤如下
步骤 1: 选择平坦输出的参数化形式
以选三次多项式基 为例, y ( t ) y (t) y(t)平坦输出轨迹, x ( t ) 、 y ( t ) x (t)、y (t) x(t)、y(t) 各自都是 3 次多项式:
x ( t ) = a 1 t 3 + a 2 t 2 + a 3 t + a 4 y ( t ) = b 1 t 3 + b 2 t 2 + b 3 t + b 4 \begin{aligned} x(t)&=a_1t^3+a_2t^2+a_3t+a_4 \\ y(t)&=b_1t^3+b_2t^2+b_3t+b_4 \end{aligned} x(t)y(t)=a1t3+a2t2+a3t+a4=b1t3+b2t2+b3t+b4
合起来写成矩阵:
y ( t ) = A ⋅ λ ( t ) = a 1 a 2 a 3 a 4 b 1 b 2 b 3 b 4 t 3 t 2 t 1 y(t)=A⋅λ(t)=\left \\begin{matrix} a_1 \& a_2 \& a_3\&a_4\\\\ b_1 \& b_2 \& b_3\&b_4 \\end{matrix} \\right \left \\begin{matrix} t\^3\\\\ t\^2\\\\ t\\\\ 1 \\end{matrix} \\right y(t)=A⋅λ(t)=a1b1a2b2a3b3a4b4 t3t2t1
其中,
- y ( t ) = x ( t ) , y ( t ) T y(t)=x(t),\\ y(t)^T y(t)=x(t), y(t)T
- λ ( t ) λ(t) λ(t):基函数(多项式),3次多项式, λ ( t ) = t 3 , t 2 , t , 1 T λ(t)=t\^3 ,\\ t\^2 ,\\ t ,\\ 1^T λ(t)=t3, t2, t, 1T
- A A A:系数矩阵(2×4)
注意:基函数维度必须满足 N ≥ 2 ( b + 1 ) N≥2(b+1) N≥2(b+1)
步骤2: 边界条件(起点 + 终点)
约束条件:
- 起点: y 0 y_0 y0, y ˙ 0 \dot y_0 y˙0
- 终点: y f y_f yf, y ˙ f \dot y_f y˙f
对应:
Y = x 0 x ˙ 0 x f x ˙ f y 0 y ˙ 0 y f y ˙ f Y=\left \\begin{matrix} x_0 \\ \\dot x_0 \\ x_f \\ \\dot x_f\\\\ y_0 \\ \\dot y_0 \\ y_f \\ \\dot y_f \\end{matrix} \\right Y=x0 x˙0 xf x˙fy0 y˙0 yf y˙f
每一列含义:
第 1 列:起点位置 y(0)
第 2 列:起点速度 ẏ(0)
第 3 列:终点位置 y(T)
第 4 列:终点速度 ẏ(T)
步骤3: 求解系数矩阵 A
上述边界条件按列拼接为矩阵方程 Y = A Λ Y=AΛ Y=AΛ,则
A = Y ⋅ Λ − 1 A=Y⋅Λ^{−1} A=Y⋅Λ−1
其中, Λ Λ Λ 是 4×4 满秩矩阵(把 t = 0 t=0 t=0 和 t = T t=T t=T 代入 λ ( t ) λ(t) λ(t) 和 λ ˙ ( t ) λ̇(t) λ˙(t) 拼起来的矩阵),
Λ = λ ( 0 ) λ ˙ ( 0 ) λ ( T ) λ ˙ ( T ) = 0 0 T 3 3 T 2 0 0 T 2 2 T 0 1 T 1 1 0 1 0 Λ= λ(0) \\quad \\dotλ(0) \\quad λ(T) \\quad \\dotλ(T)= \left \\begin{matrix} 0 \& 0 \& T\^3\&3 T\^2\\\\ 0 \& 0 \& T\^2\& 2T\\\\ 0 \& 1 \& T\&1\\\\ 1 \& 0 \& 1\&0\\\\ \\end{matrix} \\right Λ=λ(0)λ˙(0)λ(T)λ˙(T)= 00010010T3T2T13T22T10
注:每一行对应:
行 1:λ₁(t)=t³ 在 0、T 位置与导数
行 2:λ₂(t)=t² 在 0、T 位置与导数
行 3:λ₃(t)=t 在 0、T 位置与导数
行 4:λ₄(t)=1 在 0、T 位置与导数
步骤4: 得到整条轨迹
由 A A A 得到完整轨迹与控制
x ( t ) , y ( t ) → θ ( t ) → v ( t ) → ω ( t ) x(t),y(t)→θ(t)→v(t)→ω(t) x(t),y(t)→θ(t)→v(t)→ω(t)
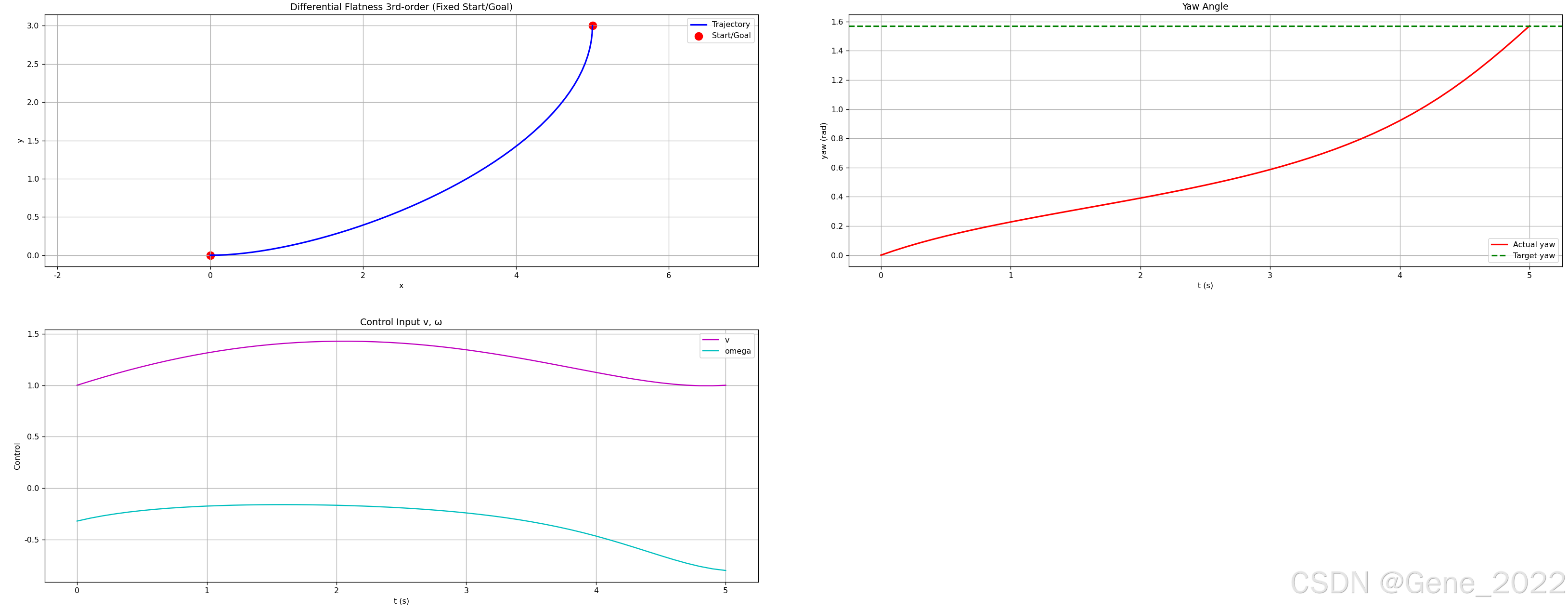
简单基于微分平坦生成的轨迹,执行如下命令
bash
# 无参数
python3 differential_flatness.py
# 自定义 终止点位姿
python3 differential_flatness.py 5.0 6.0 1.75
# 自定义 起始点位姿 + 终止点位姿
python3 differential_flatness.py 5.0 6.0 1.75 0 0 3.14differential_flatness.py 脚本内容如下:
python
import sys
import numpy as np
import matplotlib.pyplot as plt
# ==============================================
# 🔧 全局参数:角度单位设置
# 0 = 输入是 角度 (deg)
# 1 = 输入是 弧度 (rad)
# ==============================================
ANGLE_UNIT = 1
# ==================== 字体(Ubuntu 稳定)====================
plt.rcParams['font.sans-serif'] = ['DejaVu Sans']
plt.rcParams['axes.unicode_minus'] = False
# ==================== 命令行参数 ====================
argc = len(sys.argv)
# 默认值
x0, y0, yaw0 = 0.0, 0.0, 0.0
xf, yf, yawf = 5.0, 3.0, 1.5708
T = 5.0
if argc == 1:
pass
elif argc == 4:
xf = float(sys.argv[1])
yf = float(sys.argv[2])
yawf = float(sys.argv[3])
elif argc == 7:
x0 = float(sys.argv[1])
y0 = float(sys.argv[2])
yaw0 = float(sys.argv[3])
xf = float(sys.argv[4])
yf = float(sys.argv[5])
yawf = float(sys.argv[6])
else:
print("Usage:")
print(" No args : python3 diff_plat.py")
print(" 3 args : python3 diff_plat.py xf yf yaw")
print(" 6 args : python3 diff_plat.py x0 y0 yaw0 xf yf yawf")
print(f"ANGLE_UNIT : {ANGLE_UNIT} (0=deg, 1=rad)")
sys.exit(1)
# ==================== 统一转为弧度 ====================
if ANGLE_UNIT == 0:
theta0 = np.deg2rad(yaw0)
thetaf = np.deg2rad(yawf)
else:
theta0 = yaw0
thetaf = yawf
# ==================== 速度方向(朝向)====================
v0 = 1.0
dx0 = v0 * np.cos(theta0)
dy0 = v0 * np.sin(theta0)
vf = 1.0
dxf = vf * np.cos(thetaf)
dyf = vf * np.sin(thetaf)
# ==================== 微分平坦轨迹生成 ====================
Y = np.array([
[x0, dx0, xf, dxf],
[y0, dy0, yf, dyf]
])
Lambda = np.array([
[0, 0, T**3, 3*T**2],
[0, 0, T**2, 2*T ],
[0, 1, T, 1 ],
[1, 0, 1, 0 ]
])
Lambda_inv = np.linalg.inv(Lambda)
A = Y @ Lambda_inv
print("✅ Coefficient Matrix A:")
print(A)
print(f"✅ ANGLE_UNIT = {ANGLE_UNIT} (0=deg, 1=rad)")
print(f"✅ Start yaw: {theta0:.3f} rad | Goal yaw: {thetaf:.3f} rad")
# ==================== 生成轨迹 ====================
dt = 0.1
t_list = np.arange(0, T+dt, dt)
def get_traj(t):
return A @ np.array([t**3, t**2, t, 1.0])
x_traj, y_traj = [], []
dx_traj, dy_traj = [], []
ddx_traj, ddy_traj = [], []
for t in t_list:
x, y = get_traj(t)
dx, dy = A @ np.array([3*t**2, 2*t, 1, 0])
ddx, ddy = A @ np.array([6*t, 2, 0, 0])
x_traj.append(x)
y_traj.append(y)
dx_traj.append(dx)
dy_traj.append(dy)
ddx_traj.append(ddx)
ddy_traj.append(ddy)
x_traj = np.array(x_traj)
y_traj = np.array(y_traj)
dx_traj = np.array(dx_traj)
dy_traj = np.array(dy_traj)
ddx_traj = np.array(ddx_traj)
ddy_traj = np.array(ddy_traj)
# ==================== 状态 & 控制 ====================
theta_traj = np.arctan2(dy_traj, dx_traj)
v_traj = np.hypot(dx_traj, dy_traj)
omega_traj = (ddx_traj * dy_traj - dx_traj * ddy_traj) / (dx_traj**2 + dy_traj**2 + 1e-6)
# ==================== 绘图 ====================
plt.figure(figsize=(12,8))
plt.subplot(2,2,1)
plt.plot(x_traj, y_traj, 'b-', linewidth=2, label='Trajectory')
plt.scatter([x0, xf], [y0, yf], c='red', s=100, label='Start/Goal')
plt.xlabel('x')
plt.ylabel('y')
plt.title(f'Differential Flatness 3rd-order (Fixed Start/Goal)')
plt.grid(True)
plt.axis('equal')
plt.legend()
plt.subplot(2,2,2)
plt.plot(t_list, theta_traj, 'r-', linewidth=2, label='Actual yaw')
plt.axhline(thetaf, color='g', linestyle='--', linewidth=2, label='Target yaw')
plt.xlabel('t (s)')
plt.ylabel('yaw (rad)')
plt.title('Yaw Angle')
plt.grid(True)
plt.legend()
plt.subplot(2,2,3)
plt.plot(t_list, v_traj, 'm-', label='v')
plt.plot(t_list, omega_traj, 'c-', label='omega')
plt.xlabel('t (s)')
plt.ylabel('Control')
plt.title('Control Input v, ω')
plt.grid(True)
plt.legend()
plt.tight_layout()
plt.show()微分平坦轨迹生成如下: