文献来源:Tang C, Sun W, Zhang X, et al. An efficient Wi-Fi--vision map construction and self-maintenance method for indoor localizationJ. IEEE Transactions on Instrumentation and Measurement, 2023, 73: 1-15.
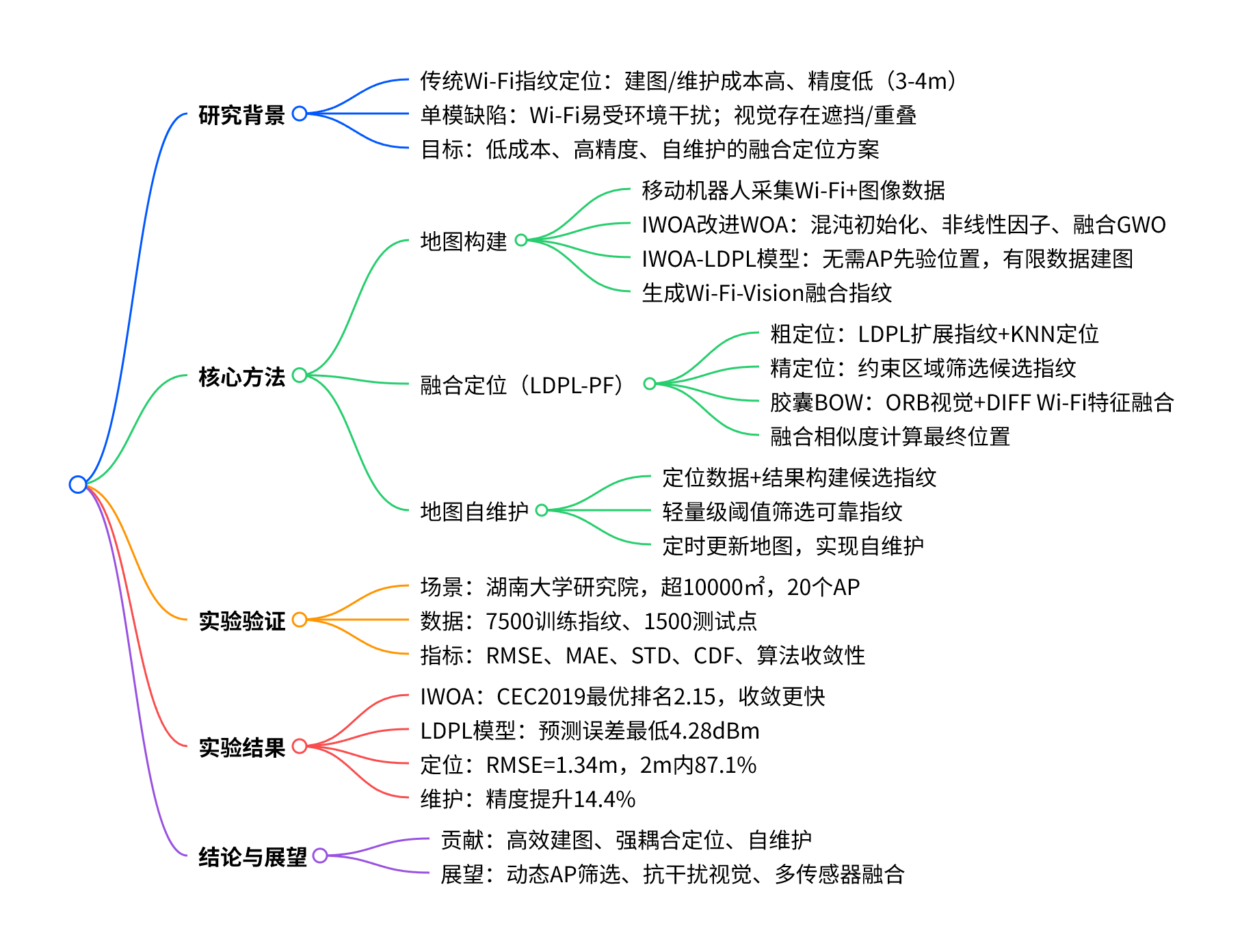
本文提出一种高效 Wi‑Fi‑Vision 融合 的室内定位地图构建与自维护方法,核心包含改进鲸鱼优化算法 IWOA 优化 LDPL 模型 、LDPL‑PF 融合定位模块 与轻量级阈值地图自维护机制 ,可在有限数据 下构建高质量 Wi‑Fi 地图,融合 Wi‑Fi 与视觉特征实现强耦合定位 ,并通过反馈自动更新地图;实验在超10000㎡场景验证,定位RMSE 低至 1.34m 、2m 内准确率达87.1% ,地图维护后精度提升14.4%,整体性能优于现有融合定位方法。
1. 前言
如今,基于Wi‑Fi的室内定位技术已被证明是最具前景的技术之一,可用于室内导航、机器人操作以及健康监测等场景。它主要有两大优势:一是**部署成本低**,Wi‑Fi信号在大型室内环境(如图书馆、机场、教学楼)中已十分普及,并且无线接入点(AP)设备价格低廉;二是**Wi‑Fi信号无处不在**,大多数移动设备(如智能手机、笔记本电脑、平板)都搭载无线传感器,能够轻松获取Wi‑Fi信号。 在室内定位技术中,**指纹定位**是最具可行性的方法之一。与其他定位方法不同,基于Wi‑Fi的指纹定位将某一位置采集到的Wi‑Fi信号作为该位置的唯一指纹。基于Wi‑Fi的指纹定位主要分为两个阶段:**指纹训练阶段**与**查询定位阶段**。在训练阶段,通过在现场不同位置采集Wi‑Fi数据,构建离线指纹地图(即基于Wi‑Fi的信号地图);在查询定位阶段,将用户当前测量的Wi‑Fi信息与离线Wi‑Fi地图进行匹配,用户的定位结果由相似度最高的指纹点位置决定。
然而,这类指纹定位技术难以在**定位精度**与**定位开销**之间取得平衡。Wi‑Fi地图越可靠,定位精度通常越高。但构建精准、稳定的Wi‑Fi地图,需要在训练阶段采集大量指纹数据,并且需要繁琐的Wi‑Fi地图更新与维护工作。采集大量训练数据(Wi‑Fi信号)能更完整地表达室内环境信息。此外,传统指纹地图维护方式需要工作人员重新到每个指纹点采集Wi‑Fi数据,工作量十分繁重。目前仍缺少能够**自动维护Wi‑Fi地图**的完善方案。同时,受复杂室内环境干扰(如人员走动、门窗与墙体遮挡、湿度变化等)以及AP硬件性能限制,基于Wi‑Fi的定位精度并不高(误差约3--4米)。
为解决上述难题,本文提出一种**基于视觉增强的Wi‑Fi室内定位方法**,设计动机如下:
-
**Wi‑Fi定位与视觉定位具有互补性**。基于Wi‑Fi的定位不受视觉重叠与遮挡影响,但易受环境与硬件干扰,导致定位精度偏低;基于视觉的定位因图像包含丰富的室内环境信息而精度较高,但存在视觉重叠、障碍物遮挡等问题,易产生定位误差。也就是说,视觉定位可以丰富室内环境信息,提升Wi‑Fi定位精度;而Wi‑Fi定位能够有效缓解视觉定位中的视角重叠与遮挡问题。二者结合可有效提升整体定位方法的性能。
-
**可穿戴设备与移动设备日益普及**,它们内部均搭载无线传感器与摄像头,可便捷获取室内环境的Wi‑Fi与图像数据。同时,无线传感器与摄像头具备价格低廉、部署成本低的优势。Wi‑Fi信号在室内环境中随处可见,降低了AP部署成本;视觉定位无需在室内场景额外部署专用设备。 本文提出的定位方法包含**地图构建、Wi‑Fi‑视觉融合定位、地图维护**三个模块,在实现可靠定位精度的同时,能够自主完成地图维护。 本文的主要贡献如下: 1. **地图构建**:传统指纹定位方法需要人工标记位置坐标点来采集数据、构建地图,耗费大量人力与财力。本文采用移动设备(移动机器人TurtleBot3)采集Wi‑Fi与图像数据,替代人工坐标打点。提出基于**改进鲸鱼优化算法(improved whale optimization algorithm,IWOA)的对数距离路径损耗(logarithmic distance path loss,LDPL)模型**,利用有限数据构建高质量Wi‑Fi地图。为弥补传统鲸鱼优化算法(WOA)收敛速度慢、易陷入局部最优等缺陷,本文提出IWOA算法,用于求解LDPL模型中的不确定参数。基于LDPL模型对图像指纹点的Wi‑Fi信号进行预测,得到Wi‑Fi‑视觉融合指纹;并基于LDPL模型完成室内空间的Wi‑Fi指纹扩展。
-
**Wi‑Fi‑视觉融合定位**:为提升基于Wi‑Fi定位的精度与稳定性,引入图像数据增强Wi‑Fi定位。提出一种全新的Wi‑Fi与视觉融合定位方法**LDPL‑PF**:首先基于LDPL模型,利用K近邻(KNN)算法得到Wi‑Fi粗定位结果;然后根据Wi‑Fi定位结果设置约束区域,筛选区域内的Wi‑Fi‑视觉候选指纹;接着提出**胶囊词袋(Capsule BOW)** 技术,对Wi‑Fi‑视觉指纹进行Wi‑Fi特征与图像特征的融合;最后基于融合相似度得到融合定位结果。
-
**地图维护**:提出构建**反馈机制**,将定位阶段实时采集的数据与估计定位结果构造成定位指纹,采用**轻量级阈值判决方法**,根据图像相似度与融合相似度判断是否保留该定位指纹,并基于保留的指纹完成Wi‑Fi‑视觉地图的维护。
-
在大型真实场景(湖南大学研究院,(The Hunan University Research Institute)中,将所提融合定位方法与现有主流融合定位方法进行对比实验,验证了其在定位精度与稳定性上的优异表现。 本文组织结构如下:第二节介绍相关工作;第三节阐述本文所提方法的整体框架;第四至第六节分别介绍Wi‑Fi‑视觉地图构建方法、Wi‑Fi‑视觉定位方法以及Wi‑Fi‑视觉地图维护策略;第七节给出实验部署与结果分析;第八节为总结。
2.相关工作
2.1 地图构建与维护
地图构建是室内定位的前提,而地图维护是实现长时间低误差定位的重要环节。Zou等人构建了GPR‑GANs,用于降低构建密集Wi‑Fi地图的时间与人力成本;Xue等人提出MEGPR模型,仅用少量数据集即可完成Wi‑Fi地图构建;Zou等人还采用了基于Wi‑Fi的非侵入式室内定位系统WinIPS,该系统包含数据采集模块与基于改进高斯过程回归的室内地图模型。 尽管地图构建与维护技术在持续优化,但仍存在一些挑战性问题。首先,多数无线地图构建方法需要在每个采样点进行多次无线信号采集,例如高斯过程回归(GPR)模型需要计算每个采样点的均值与方差,在大型场景中仍会产生较高的人力成本。其次,传统方法在地图维护阶段需要对大型室内环境重新采样,这种方式维护成本高、难度大。此外,单传感器在地图构建与维护中存在局限性,环境信息表达不够丰富,且鲜有文献涉及多传感器地图的构建与维护。
本文采用**Wi‑Fi与视觉融合**的地图构建与自维护方案,使用移动机器人采集环境中的Wi‑Fi与图像数据,降低人力成本。同时,采用**对数距离路径损耗(LDPL)模型**构建AP信号强度分布,并提出**混合鲸鱼优化算法**获取LDPL模型参数,用于Wi‑Fi‑视觉地图构建。与高斯过程回归(GPR)模型相比,LDPL模型无需计算采样点的均值与方差,仅需在采样点采集一次数据即可,提升了采集效率。与传统LDPL模型相比,基于IWOA的LDPL模型无需预先知道AP的位置信息,可通过IWOA算法计算得到AP位置。本文构建了**反馈机制**实现Wi‑Fi‑视觉地图自维护,并提出**轻量级阈值方法**筛选与存储在线定位阶段获取的高可靠Wi‑Fi与图像数据。
2.2 室内定位技术
目前,基于Wi‑Fi的定位技术越来越普及,专家与学者不断致力于提升Wi‑Fi定位精度、增强抗干扰能力。Guo等人提出基于扩展候选位置集(ECLS)的Wi‑Fi定位框架,以缓解接收信号强度(RSS)波动带来的影响;Xue等人提出一种基于Wi‑Fi的模型以应对定位精度挑战,首先设计AP判别准则(APDC)选择高区分度AP,其次将定位残差应用于高斯过程回归模型,最后采用位置修正模块(LMM)减小定位误差;Guo等人采用通过融合一组指纹的Wi‑Fi定位方法(Wi‑Fi‑FAGOT)提升定位精度,并提出全局融合轮廓(GFP)构建算法应用于Wi‑Fi‑FAGOT。
尽管Wi‑Fi定位的精度与稳定性在不断优化,但其获取的室内环境信息有限,导致定位精度偏低。**Wi‑Fi与其他传感器融合的定位技术**被证明是丰富环境信息、提升定位精度与鲁棒性的有效途径,其中**Wi‑Fi与视觉融合**是大型室内定位的热门研究方向,因为二者具有互补性强、易部署、成本低等优势。
Guo等人提出一种适用于室内定位的Wi‑Fi与图像数据分层方案iStart,将室内环境划分为多个子区域,每个子区域采集Wi‑Fi与图像数据,通过Wi‑Fi指纹匹配得到最佳匹配子区域(BMSA),再通过视觉定位方法得到用户在子区域内的位置;Wang等人提出基于局部二值模式特征的松耦合定位方法,先通过Wi‑Fi指纹匹配得到粗略定位范围,再通过距离补偿与基于SURF的图像匹配得到当前图像与各指纹点的相似度,筛选最相似图像得到位置信息;Redžić等人提出基于轻量级阈值的Wi‑Fi与图像融合室内定位方法,通过阈值决定采用Wi‑Fi相似度还是图像相似度得到最终定位结果,并提出一种新型早期融合方法解决全局定位与绑架问题;将Wi‑Fi与视觉数据结合作为经典FABMAP框架的输入实现融合定位;Huang等人采用新型Wi‑Fi与视觉融合指纹(Wi‑Vi fingerprint),先设计基于加权AP(WAPs)的粗定位方法,再提出高斯加权KNN(GW‑KNN)提升视觉定位精度,最后通过度量定位得到最终结果。
本文基于LDPL模型构建AP信号强度分布,并提出IWOA获取LDPL模型参数用于Wi‑Fi‑视觉地图构建;构建反馈机制实现Wi‑Fi‑视觉地图自维护,并提出轻量级阈值方法筛选与存储在线定位阶段获取的高可靠Wi‑Fi与图像数据。
第二节的唯一核心目的:梳理现有研究的不足,证明本文方法的必要性、创新性与优势,为后续提出自己的方案做学术铺垫 。
-
梳理领域现状 总结当前室内定位在地图构建 / 维护 、Wi‑Fi 定位 、Wi‑Fi + 视觉融合定位三方面的主流方法,让读者知道 "现在大家都在做什么"。
-
指出关键缺陷(最关键) 明确点出现有技术的四大痛点:
- 建图成本高、耗人力
- 地图无法自动维护
- 单模定位精度低、易受干扰
- 现有融合方法多为弱耦合,效果有限
-
顺理成章引出本文方案 用 "现有方法做不到→所以我要做" 的逻辑,证明本文提出的:
- IWOA‑LDPL 建图
- LDPL‑PF 强耦合融合定位
- 轻量级阈值自维护 是真正解决问题、填补空白的创新。
3. 方法概述
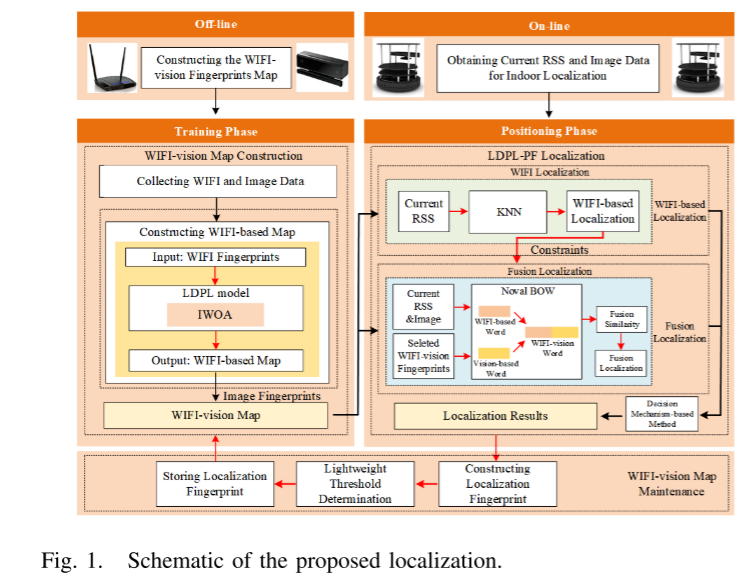
图1给出了Wi-Fi和视觉相结合的室内定位方法的原理图。主要包括三个部分:1)Wi-Fi视觉地图构建(训练阶段);2)LDPL-PF定位(定位阶段);3)Wi-Fi视觉地图维护。
在训练阶段,首先,移动机器人获取Wi-Fi指纹和图像指纹。随后,为了构建基于Wi-Fi的地图,提高定位精度,提出了基于IWOA的LDPL模型。提出了基于Wi-Fi指纹建立AP信号强度分布的LDPL模型,并提出应用IWOA算法获取LDPL模型中的参数。最后,将图像指纹添加到基于Wi-Fi的地图中,构建Wi-Fi视觉指纹地图。
定位阶段分为两个阶段:基于Wi-Fi的定位阶段和融合定位阶段。在基于Wi-Fi的定位阶段,基于LDPL模型对Wi-Fi指纹进行了扩展,并使用KNN算法实现了基于Wi-Fi的定位。将基于Wi-Fi的定位结果作为约束区域,在约束区域内提取Wi-Fi视觉指纹。
在融合定位阶段,我们提出了一种新的胶囊弓技术,将基于Wi-Fi的词语和基于视觉的词语结合起来,得到融合的相似度和融合的定位结果。
最后,我们介绍了一种多决策方法来获得最终的定位结果。在Wi-Fi视觉地图维护中,我们提出了一种有效的反馈机制。首先,将当前采集的Wi-Fi和图像数据以及定位结果构建为定位指纹。然后使用一种轻量级阈值判决方法来选择和存储定位指纹。最后,将存储的定位指纹用于Wi-Fi和视觉地图维护。
机器人采集 → IWOA‑LDPL 建融合地图 → KNN 粗定位 + 胶囊 BOW 精定位 → 高可靠数据反馈自动维护地图 ,实现低成本建图、高精度定位、长期自维护的完整室内定位系统。
具体步骤见第III-VI节。室内场景中有M1个Wi-Fi指纹、M2个图像指纹和N个AP。Wi-Fi指纹是表示为

式中,fw i(i=1,2,.。。,M1)是第i个Wi-Fi指纹。每个Wi-Fi指纹包含Wi-Fi数据和位置数据,并由

其中Ri和Pwi分别是第i个Wi-Fi指纹的Wi-Fi和位置数据。RI表示如下:

其中,RSSi j表示第i个Wi-Fi指纹的第j个AP的Wi-Fi信号强度。Pw i表示如下:

其中,xwi和ywi表示室内环境中第i个Wi-Fi指纹点的二维位置数据。
图像指纹如下:

这里,fi(i=1,2,.。。,M2)是第i个图像指纹。每个图像指纹由图像数据和位置数据组成,并被表示为

其中,ii是第i个图像指纹的图像数据,Pi i表示第i个图像指纹的位置数据。Pi i表示如下:

其中x i i和yi i表示室内环境中第i个图像指纹点的二维位置数据。
4.Wi-Fi-视觉地图构建
4.1基于Wi-Fi的地图构建LDPL模型
构建高质量的Wi-Fi地图有两个好处。一方面,可以提高基于Wi-Fi的定位的准确性和稳定性。另一方面,它可以实现Wi-Fi信号的预测和对未采集区域的定位28。已知距离和接收的WiFi信号强度符合LDPL模型29。LDPL模型的数学表达式如下:

这里,R(AP0)和RR分别是参考点位置处的Wi-Fi信号强度和预测点位置处的预测信号强度。D0和d分别表示从参考点到AP的距离和从预测点到AP的距离。Cr是一个常量。Xσ是方差为σ的高斯随机变量。β表示环境衰减系数。
4.2.传统的WOA(鲸鱼优化算法)
Mirjalili和Lewis30提出的WOA是一种有效的群体优化算法,用于求解问题的多维最优解。WOA是对座头鲸生活中掠夺行为的模拟。它具有模型简单、参数少、易于实现等优点,受到专家学者的青睐。传统的WOA算法分为三个步骤:包围猎物、气泡网攻击方法、搜索猎物。
1)包围猎物:座头鲸根据猎物的位置行事,并将其包围。其数学模型如下所示:

其中t是当前迭代次数。A和C表示相关向量系数。X∗(T)和X(T)分别表示当前最优解的位置向量和位置向量。A和C的相关计算如下所述
其中r是从0到1的随机向量。a描述了随着迭代次数的增加而从2线性减小到0的递减因子。A表示为

2)气泡网攻击方法:在WOA算法中,气泡网攻击分为包围捕食机制和螺旋更新机制。环绕式猎物机构如(9)所示,螺旋更新机构的数学模型如下所示

其中b是对数螺线形状的常数,而L是−1,1的随机数。由于座头鲸围捕机制和气泡网攻击机制同时发生,因此这两种机制都有50%的概率发生。数学表达式如下:

3)寻找猎物:以上两种更新机制的先决条件是|A|<1。如果|A|≥1,座头鲸使用以下表达式的随机位置更新来搜索猎物:

这里,Xr(T)表示当前种群中随机选择的个体鲸鱼。
4.3 改进的WOA
我们提出了一种IWOA算法。该算法主要通过三种方式进行优化:基于混沌映射的种群初始化,非线性下降因子a,以及WOA和灰狼算法的组合(GWO)31。邓等人。32论证了种群初始化的好坏直接影响到优化算法的性能。混沌映射是提高种群初始化质量的有效手段。我们引入正弦函数混沌映射来初始化种群。正弦混沌映射函数表示为
其中xi j(0)是第i个个体在初始化阶段的第j个维度的信息。Ul j和dl j分别表示第j维的数据上限和下限。C是系数常数,等于2.3。NW表示种群中的个体总数,ND表示种群维度的数量。
Sun等人。33说明引入非线性迭代因子可以有效提高种群算法的收敛效率。因此,我们提出将递减系数a变换如下:
Huang等人的研究成果27论证了多种混合优化算法可以提高算法的整体性能。突出了不同算法的优势。传统的WOA算法存在容易陷入局部最优的问题,而GWO算法在全局搜索能力方面具有更大的优势。
因此,我们在WOA算法中加入了GWO算法的思想。在围捕阶段见(9)和(10),我们定义由前三个适应值映射的位置信息分别为Xα、Xβ和Xδ。因此,我们将(9)和(10)变换如下:
4.4 基于IWOA的LDPL模型
4.5Wi-Fi-视觉地图指纹构建
5.LDPL-PF定位
定位方法总结
1 改进鲸鱼优化算法(IWOA)
针对传统 WOA 收敛慢、易陷入局部最优问题,做三点改进:
- 正弦混沌映射初始化种群,提升初始分布均匀性
- 非线性递减因子 a,加速算法收敛
- 融合灰狼优化算法 GWO,增强全局搜索能力
2 IWOA‑LDPL 地图构建
- 采用对数距离路径损耗模型 LDPL描述 Wi‑Fi 信号衰减
- IWOA 求解 LDPL 最优参数,无需 AP 位置先验信息
- 移动机器人采集数据,单次采样即可建图,降低人力成本
- 融合图像指纹,生成Wi‑Fi‑Vision 融合指纹地图
3 LDPL‑PF 融合定位
- 粗定位:LDPL 扩展指纹 + KNN,得到 Wi‑Fi 初步定位结果
- 区域约束:以粗定位为中心筛选候选融合指纹
- 胶囊 BOW 特征融合:ORB 提取视觉特征 + DIFF 编码 Wi‑Fi 特征,强耦合融合
- 融合相似度计算,输出最终定位结果
4 轻量级阈值地图自维护
- 定位阶段数据与结果构建候选指纹
- 双阈值(融合相似度阈值 Lf 、视觉相似度阈值 Lv)筛选可靠指纹
- 每12 小时更新地图,实现无人干预自维护