📄 论文解析:用神经网络给优化器"热身"------面向 UAV-UGV 交接任务的学习加速轨迹规划
论文全名: Learning-Accelerated Optimization-based Trajectory Planning for Cooperative Aerial-Ground Handover Missions
发布时间: 2026年5月(arXiv:2605.19562v1)
机构: 斯图加特大学工程与计算力学研究所 · 芬兰 LUT 大学
一、问题背景:优化器太慢,神经网络不靠谱,怎么办?
轨迹规划界长期存在一对撕裂的矛盾:
优化方法 (如非线性规划、最优控制)的优点是有保证 ------生成的轨迹动力学可行、约束满足、数学最优。但它的缺点也很致命:慢。对于一个包含四旋翼飞行器(UAV)和地面移动机器人(UGV)的协同任务,每次规划可能需要数秒甚至更长,完全不适合需要频繁重规划的动态场景。
学习方法 (神经网络)的优点是快 ------给定任务状态,毫秒内就能输出轨迹预测。但它的缺点同样突出:不可靠。神经网络是数据的函数近似,遇到训练分布之外的情况可能失效,输出的轨迹可能违反动力学约束,甚至导致碰撞或任务失败。
这篇论文的核心洞察非常简洁:两者各取所长,组合使用。
用神经网络快速生成一条"差不多对"的轨迹,把它作为热启动(warm start) 交给优化器;优化器从这个好的初始点出发,只需少量迭代就能收敛到精确最优解。最终既保留了优化方法的严格保证,又大幅压缩了计算时间。
这个思路的名字叫:Learning-Augmented Trajectory Planning(学习增强的轨迹规划)。
二、具体任务:无人机接包裹,然后送走
本文研究的场景非常具体且有实际意义------空地交接(Aerial-Ground Handover):
- 地面机器人(UGV)携带一个包裹,从起点出发
- 无人机(UAV)自主飞行,与地面机器人在某个时空点完成交接,从地面机器人手中接过包裹
- 无人机携带包裹飞往目标位置(地面机器人因地形无法到达的地方)
这里的规划难点不只是"各自走到目的地",而是:
- UAV 和 UGV 要在同一时刻 抵达同一位置完成交接
- 交接时刻和交接地点都是待优化变量,不是预先给定的
- 双方的动力学约束(四旋翼飞行力学、地面机器人全向运动学)必须全程满足
- 还要兼顾时间效率和控制能耗
这使得问题成为一个高维、非线性、非凸的最优控制问题,用 IPOPT 求解器冷启动(cold start)平均需要 4.38 秒,在动态场景中几乎不可接受。
三、应用场景:哪里需要"快速、可靠的空地协同规划"?
| 场景 | 具体需求 |
|---|---|
| 物流配送 | 地面车辆在不可进入的区域边缘与无人机完成货物交接,实现"最后一公里"空中递送 |
| 灾害救援 | 地面机器人无法越过废墟,无人机接过物资后飞入被隔离区域 |
| 军事补给 | UGV 作为前线补给载体,UAV 高速取货后投送至更远位置 |
| 医疗急救 | 地面救护车将药品或血液制品交给无人机,后者快速飞越交通拥堵区域 |
| 建筑施工 | 地面机器人递送工具,无人机将其吊运至高空工人处 |
所有这些场景的共性是:时间敏感、交接约束严格、环境可能动态变化,需要快速重规划。
四、方法解析:三层架构,各司其职
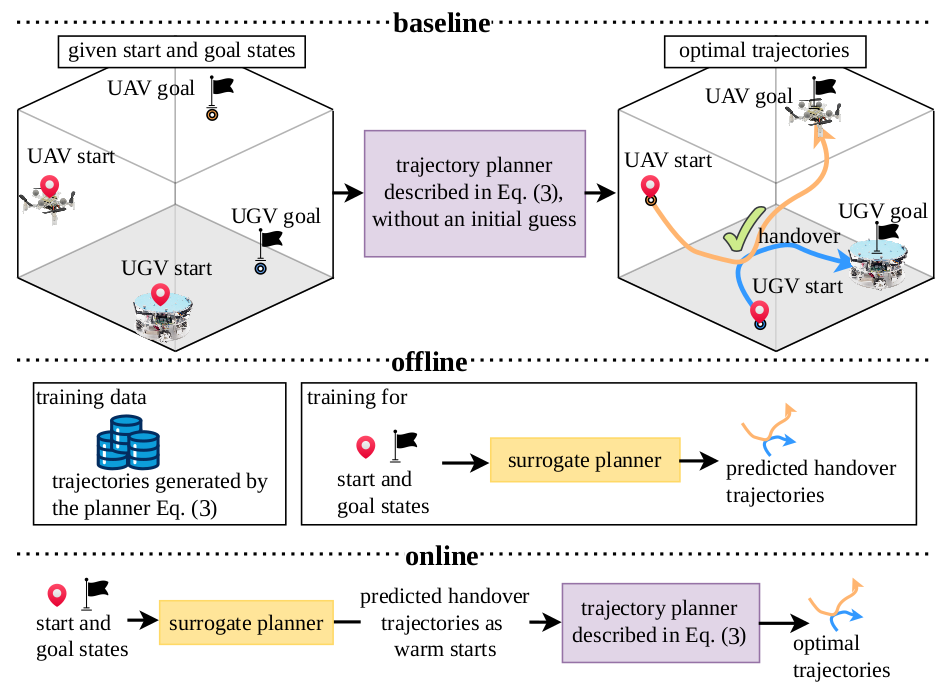
4.1 离线阶段:让优化器当"老师"
首先,用已有的集中式最优控制规划器(基于 CasADi/IPOPT 框架)求解 5000 个随机交接任务,生成专家轨迹数据集。
每条专家轨迹包含:
- UAV 的 12 维状态序列(位置、速度、欧拉角、角速度)
- UGV 的 4 维状态序列(平面位置和速度)
- 40 个时间步的时间间隔 Δt
这批数据是神经网络的训练样本------"最优解长什么样"的范本。
4.2 网络架构:解耦的编码器-解码器 LSTM
神经代理规划器(Surrogate Planner)由两个结构相同但独立训练的子网络组成,分别负责 UAV 和 UGV 的轨迹预测。
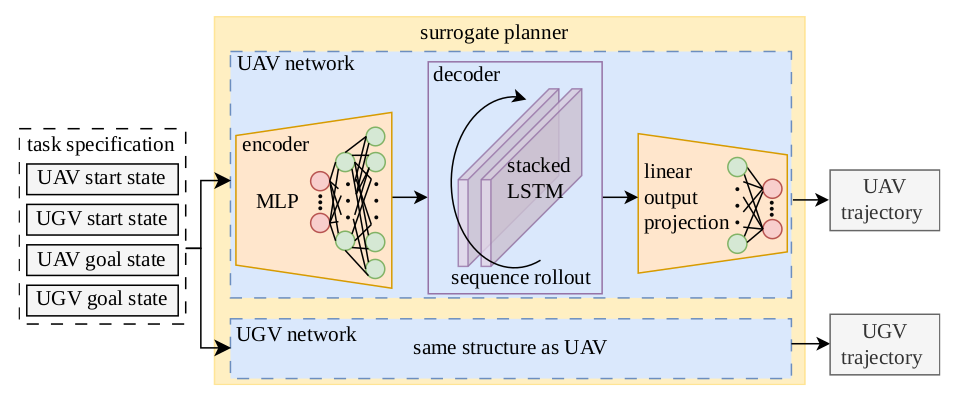
整体是编码器-解码器结构:
编码器(Encoder):MLP
- 输入:任务规格 τ(32 维向量,包含 UAV 和 UGV 的起止状态)
- 输出:LSTM 解码器的初始隐藏状态 h₀ 和单元状态 c₀
- 本质:把静态的任务描述"翻译"成动态生成过程的起点
解码器(Decoder):堆叠 LSTM
- 从 h₀/c₀ 出发,自回归地逐步生成未来 40 个时间步的状态预测
- 每一步的输出经过线性投影层,得到该时刻的机器人状态和时间间隔
- 两个子网络接受同一个任务规格 τ,但各自生成各自机器人的轨迹
这里的"解耦"设计颇有匠心:UAV 是 12 维状态的飞行器,UGV 是 4 维状态的地面机器人,两者动力学特性截然不同。用同一个网络强行预测两者,既难训练,泛化性也差;分开来,各自专精,效果更好。
4.3 坐标变换:让网络"忘掉"绝对位置
为了让网络具有平移不变性(即同样的相对构型,不管在地图哪个位置,网络输出应该一样),论文将所有水平坐标变换到以 UAV 起点为原点的相对坐标系,只保留 UAV 高度在全局坐标中(避免相对高度为负导致无人机"钻地"的问题)。
这个细节设计让网络从只见过 5000 个特定绝对位置的样本,具备了泛化到任意空间位置的能力。
4.4 训练技巧:计划采样(Scheduled Sampling)
训练时有一个经典难题------训练时用真实标签引导(teacher forcing),推理时靠自身预测递推(autoregressive),这两者之间存在分布偏移。
论文采用计划采样(scheduled sampling):随着训练轮次增加,逐渐降低使用真实标签的概率(从 1.0 线性衰减至 0.1),让网络在训练中逐渐习惯"依赖自己的预测"。
损失函数也动了心思:并非所有时间步等权------交接时刻附近的预测权重(35)远高于普通时间步(1),起点权重(5)和终点权重(10)也有所提升。这使得网络特别擅长预测最关键的交接配合时刻。
4.5 在线阶段:网络预测 → 优化器精修
推理时,神经代理规划器在毫秒级生成 UAV 和 UGV 的协调轨迹预测,将其转换回全局坐标后,作为热启动送入原来的非线性规划优化器。优化器从这个"已经相当靠谱"的初始点出发,快速收敛到严格满足所有约束的最优解。
五、创新点:这篇论文的贡献到底是什么?
✦ 创新一:首次将"代理规划器 + 集中式优化"引入空地协同交接任务
作者明确声称,据其所知,这是首个在协作式 UAV-UGV 交接任务中,将基于智能体的学习代理与集中式轨迹优化框架结合的工作。此前的工作要么是纯优化(慢但准),要么是纯学习(快但无保证),两者结合在这一具体应用场景是新的。
✦ 创新二:解耦 LSTM 代理的设计哲学
相比"一个大网络预测所有机器人轨迹",解耦设计让每个子网络专注于自身机器人的动力学特性,同时共享任务上下文。这在保持网络轻量的同时,充分利用了各平台的异构性。
✦ 创新三:"慢老师"驱动"快学生"的闭环范式
利用高质量但低速的优化器生成训练数据,再用训练好的神经网络反过来加速优化器------这种"数据飞轮"式的自举(bootstrapping)闭环,是一种在机器人规划领域有广泛复用价值的设计模式。
✦ 创新四:以成功率和速度双维度评价
实验结果干净利落:热启动将平均计算时间从 4.38 秒压缩至 1.44 秒(3.04 倍加速) ,优化成功率从 96% 提升至 100% ,解质量几乎没有损失(目标函数各分量近乎相同)。成功率从 96% 到 100% 看似只是小数字,但意味着彻底消除了优化失败的可能,在工程上极其重要。
六、不足之处:诚实审视这篇论文的边界
⚠ 不足一:场景极其简化,没有障碍物
实验在 4m×4m 的空旷空间内进行,没有任何静态或动态障碍物。在真实的城市、仓库或灾害环境中,障碍规避是不可回避的核心需求。论文自己在结论中承认这是首要的未来工作,但目前的方法完全没有触及。
⚠ 不足二:仅有仿真,无实机验证
全文所有实验均为数值仿真,不涉及真实机器人。神经网络预测出来的轨迹是否在真实物理平台上仍能有效热启动优化器?传感器噪声、模型误差、执行延迟如何影响热启动质量?这些问题悬而未决。
⚠ 不足三:只支持 1 UAV + 1 UGV 的极小规模
CoPCS 已经在研究 4 UAV + 2 UGV 的配置,而本文仅针对单对机器人的交接任务。扩展到多对机器人时,交互关系的复杂度会爆炸,解耦 LSTM 是否仍然适用是个大问号。
⚠ 不足四:训练数据依赖优化器,规模受限
5000 条训练数据全由 IPOPT 优化器生成,每条需要数秒计算时间,总数据生成成本可观。如果要扩展到更复杂场景(更多机器人、更大空间、障碍物),数据生成代价会急剧上升,形成瓶颈。
⚠ 不足五:预测误差在分布边界处恶化
论文承认,对于起止状态靠近训练分布边界的场景,代理规划器的预测精度下降,有时候热启动比冷启动需要更多迭代(图 3 中有少量"crossed"的异常点)。这说明网络的泛化性在极端情况下仍然脆弱,需要更鲁棒的网络架构或更宽的训练分布来应对。
七、横向对比:与 CoPCS 的异同
这篇论文和同期的 CoPCS(Collaborative Planning with Concurrent Synchronization)同样研究 UAV-UGV 协同,但方向截然不同:
| 维度 | 本文(学习加速轨迹规划) | CoPCS |
|---|---|---|
| 核心问题 | 如何加速单次轨迹优化 | 如何联合规划大规模任务分配 |
| 机器人规模 | 1 UAV + 1 UGV | 最多 4 UAV + 2 UGV |
| 任务类型 | 精确交接(handover) | 大范围环境监测(多点访问) |
| 学习的角色 | 加速优化器(warm start) | 替代优化器(端到端规划) |
| 约束处理 | 优化器保证严格满足 | 学习模型隐式编码约束 |
| 实机验证 | 无 | 有(Crazyflie + Limo) |
两篇论文像是同一问题空间的两个极端:一个追求精度与保证 ,另一个追求规模与速度。
八、总结:一个小而精的"工程智慧"故事
这篇论文篇幅不长,方法也不复杂,但它讲了一个在工程实践中颇具启发性的道理:不必选择"全学习"还是"全优化",两者可以优雅地共存。
神经网络不是要取代优化器,而是让优化器从更好的起点出发。就像一个经验丰富的工程师,不是靠死算解出所有问题,而是凭直觉快速定位到答案附近,然后再精确核算------直觉与严谨,缺一不可。
这种"学习增强优化"(Learning-Augmented Optimization)的范式,在机器人轨迹规划、模型预测控制、组合优化等领域都有广阔的延伸空间,本文只是一个精致的起点。