摘要:本文介绍 NWD(Normalized Wasserstein Distance)损失函数在 YOLOv11 中的集成方法。NWD 将边界框建模为 2D 高斯分布,用 Wasserstein 距离替代传统 IoU 衡量检测框相似度,有效解决了 IoU 对小目标位置偏移过度敏感的问题。实验表明,NWD + CIoU 混合损失可在小目标检测场景获得稳定提升。
一、YOLOv11 改进目录
本文属于 YOLOv11 损失函数改进系列 之一:
| 序号 | 改进方向 | 内容 | 适用场景 |
|---|---|---|---|
| 1 | 检测头改进 | 添加 P2 层小目标检测头 | 超小目标(<16×16像素) |
| 2 | 下采样改进 | SPDConv 空间转深度卷积 | 小目标特征保留 |
| 3 | 损失函数改进 | Focal Loss 替代 BCE 分类损失 | 类别不均衡 |
| 4 | 损失函数改进 | ⭐ NWD Loss 替代/混合 CIoU | 小目标回归精度提升 |
| 5 | 训练策略 | Multi-scale training / Mosaic 优化 | 小目标泛化性 |
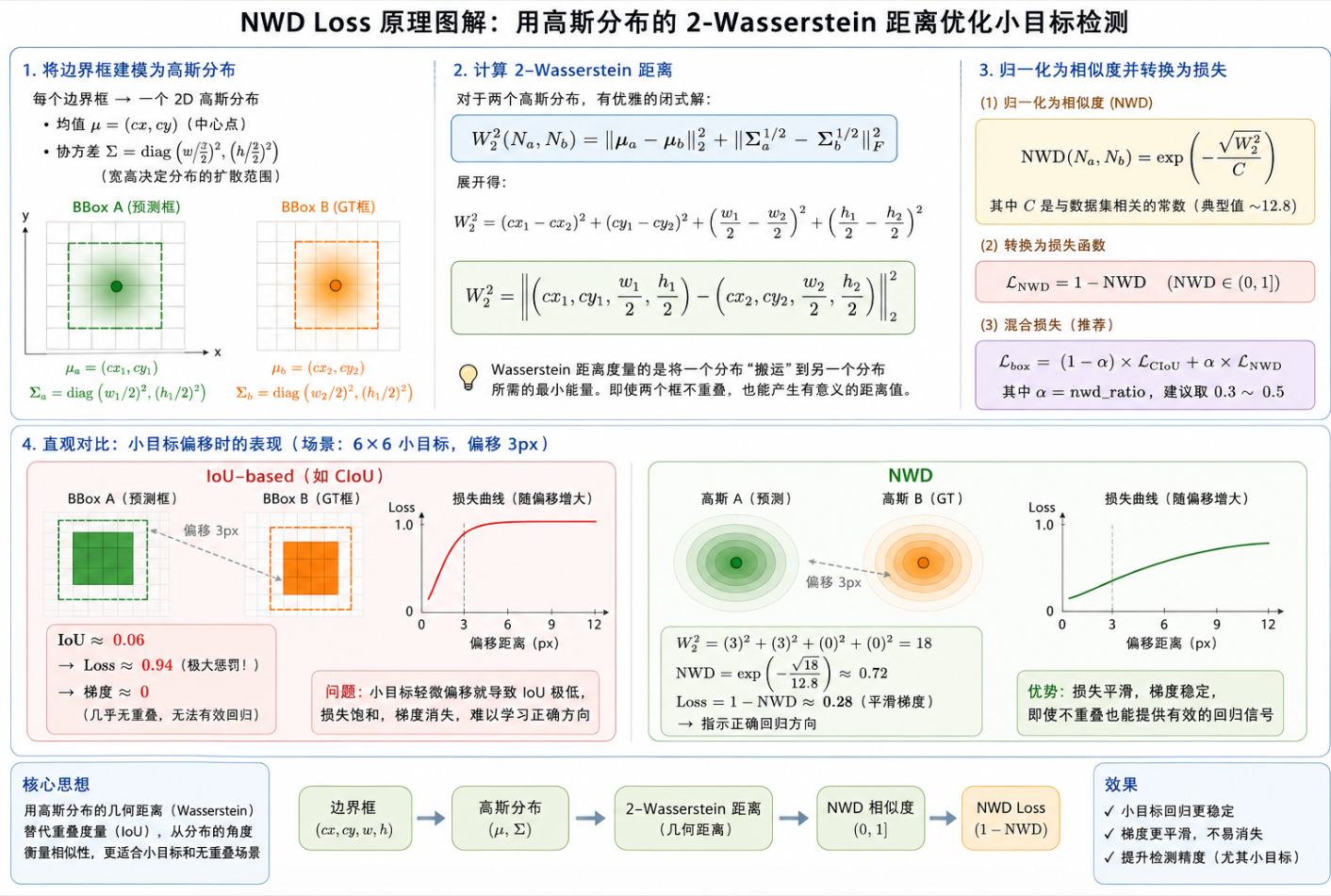
二、NWD 原理介绍
2.1 为什么 IoU 对小目标不公平?
传统目标检测使用 CIoU(Complete IoU) 作为边界框回归损失。对于大目标,IoU 表现良好;但对于小目标,IoU 存在两个致命缺陷:
问题一:小偏移引起大落差
假设一个 6×6 像素的小目标,仅偏移 3 个像素:
python
中心点偏移 3px:
├─ 大目标 (200×200): IoU 从 0.97 → 0.94 (下降 3%)
└─ 小目标 (6×6): IoU 从 0.53 → 0.06 (下降 89%!)同样的位置偏移,对小目标的 IoU 影响是大目标的 30 倍。
问题二:无重叠区域时梯度为零
当预测框与真实框没有交集时,IoU = 0,梯度也为零,模型无法判断"应该往哪个方向移动"。
2.2 NWD 核心思想:把框看作高斯分布
NWD 的出发点很简单:不要用硬边界(重叠/不重叠),而是用概率分布来建模边界框。
一个边界框 (cx, cy, w, h) 被建模为一个 二维高斯分布:
python
N(μ, Σ)
其中:
均值 μ = [cx, cy]ᵀ ← 框的中心
协方差 Σ = [[(w/2)², 0],
[0, (h/2)²]] ← 框的尺寸决定分布"胖瘦"直观理解:边界框不是"有或无"的硬区域,而是一个中心最热、边缘衰减的概率分布。
2.3 数学公式
第一步:计算 2-Wasserstein 距离
对于两个高斯分布,2-Wasserstein 距离有优雅的闭式解:
python
W₂²(N_a, N_b) = ||μ_a - μ_b||²₂ + ||Σ_a^{1/2} - Σ_b^{1/2}||²_F
展开得:
W₂² = (cx₁-cx₂)² + (cy₁-cy₂)² + (w₁/2-w₂/2)² + (h₁/2-h₂/2)²
= ||(cx₁, cy₁, w₁/2, h₁/2) - (cx₂, cy₂, w₂/2, h₂/2)||²Wasserstein 距离度量的是将一个分布"搬运"到另一个分布所需的最小能量。即使两个框不重叠,也能产生有意义的距离值。
第二步:归一化为相似度
Matlab
NWD(N_a, N_b) = exp(-√W₂² / C)其中 C 是与数据集相关的常数(典型值 ~12.8,反映数据集中物体的平均尺度)。
第三步:转换为损失函数
Matlab
L_NWD = 1 - NWD (NWD ∈ (0, 1] 为相似度)混合损失(推荐):
Matlab
L_box = (1 - α) × L_CIoU + α × L_NWD其中 α = nwd_ratio,建议取 0.3~0.5。
2.4 直观对比
三、适用场景
3.1 推荐使用 NWD 的场景
| 场景 | 推荐度 | 说明 |
|---|---|---|
| 小/微小目标检测 | ⭐⭐⭐⭐⭐ | NWD 核心优势场景 |
| 无人机/卫星图像 | ⭐⭐⭐⭐⭐ | VisDrone、AI-TOD、DOTA 等数据集 |
| 工业缺陷检测 | ⭐⭐⭐⭐ | 裂纹、凹坑等小缺陷 |
| 交通标志/行人 | ⭐⭐⭐⭐ | KITTI、CityPersons 中的小目标 |
| 医学图像 | ⭐⭐⭐⭐ | 细胞检测、病灶检测 |
| 遥感目标检测 | ⭐⭐⭐⭐ | 舰船、飞机等小目标 |
| 一般目标检测(COCO) | ⭐⭐⭐ | 小目标有提升,中大目标持平 |
| 大目标为主的数据集 | ⭐⭐ | 优势不明显,纯 CIoU 可能更好 |
3.2 判断标准
如果数据集中 大量目标的面积 < 图像面积的 1%(例如在 640×640 图像中 < 32×32 像素),建议使用 NWD。
四、论文与代码链接
| 资源 | 链接 |
|---|---|
| 论文 | A Normalized Gaussian Wasserstein Distance for Tiny Object Detection |
| 官方代码 (MMDetection) | github.com/jwwangchn/NWD |
| 本实现 (YOLOv11) | 见 ultralytics/utils/metrics.py 和 ultralytics/utils/loss.py |
| 训练脚本 | train_nwd.py |
五、详细实现步骤
5.1 修改 ultralytics/utils/metrics.py
在 bbox_iou 函数后添加 wasserstein_loss 函数:
Matlab
def wasserstein_loss(
pred_boxes: torch.Tensor,
target_boxes: torch.Tensor,
xywh: bool = False,
constant: float = 12.8,
eps: float = 1e-7,
) -> torch.Tensor:
"""Compute Normalized Wasserstein Distance (NWD) loss for bounding boxes."""
if xywh:
cx1, cy1, w1, h1 = pred_boxes.chunk(4, -1)
cx2, cy2, w2, h2 = target_boxes.chunk(4, -1)
else:
# xyxy → cx, cy, w, h
x1, y1, x2, y2 = pred_boxes.chunk(4, -1)
cx1, cy1 = (x1 + x2) / 2, (y1 + y2) / 2
w1, h1 = (x2 - x1).clamp(eps), (y2 - y1).clamp(eps)
x1, y1, x2, y2 = target_boxes.chunk(4, -1)
cx2, cy2 = (x1 + x2) / 2, (y1 + y2) / 2
w2, h2 = (x2 - x1).clamp(eps), (y2 - y1).clamp(eps)
# 2-Wasserstein distance
w_dist = (
(cx1 - cx2).pow(2) + (cy1 - cy2).pow(2)
+ (w1 / 2 - w2 / 2).pow(2) + (h1 / 2 - h2 / 2).pow(2)
)
# Normalized Wasserstein Distance
nwd = torch.exp(-torch.sqrt(w_dist + eps) / constant)
return 1.0 - nwd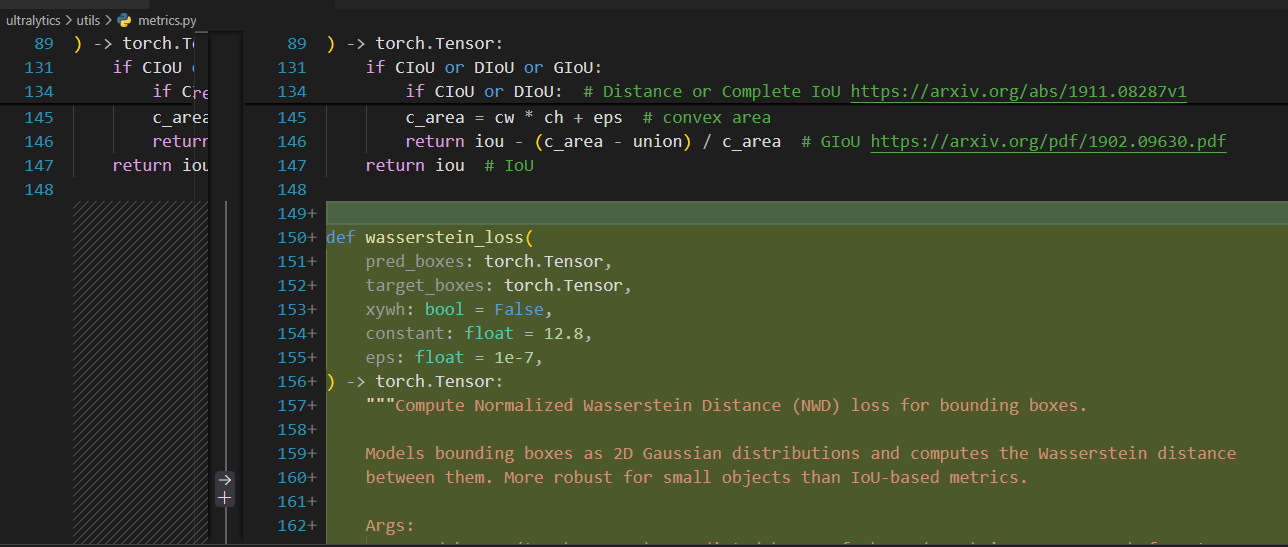
5.2 修改 ultralytics/utils/loss.py
步骤 2.1 --- 导入 wasserstein_loss:
Matlab
from .metrics import bbox_iou, probiou, wasserstein_loss # 添加 wasserstein_loss
步骤 2.2 --- 修改 BboxLoss.__init__,增加 nwd_ratio 参数:
Matlab
class BboxLoss(nn.Module):
def __init__(self, reg_max: int = 16, nwd_ratio: float = 0.0, nwd_constant: float = 12.8):
super().__init__()
self.dfl_loss = DFLoss(reg_max) if reg_max > 1 else None
self.nwd_ratio = nwd_ratio
self.nwd_constant = nwd_constant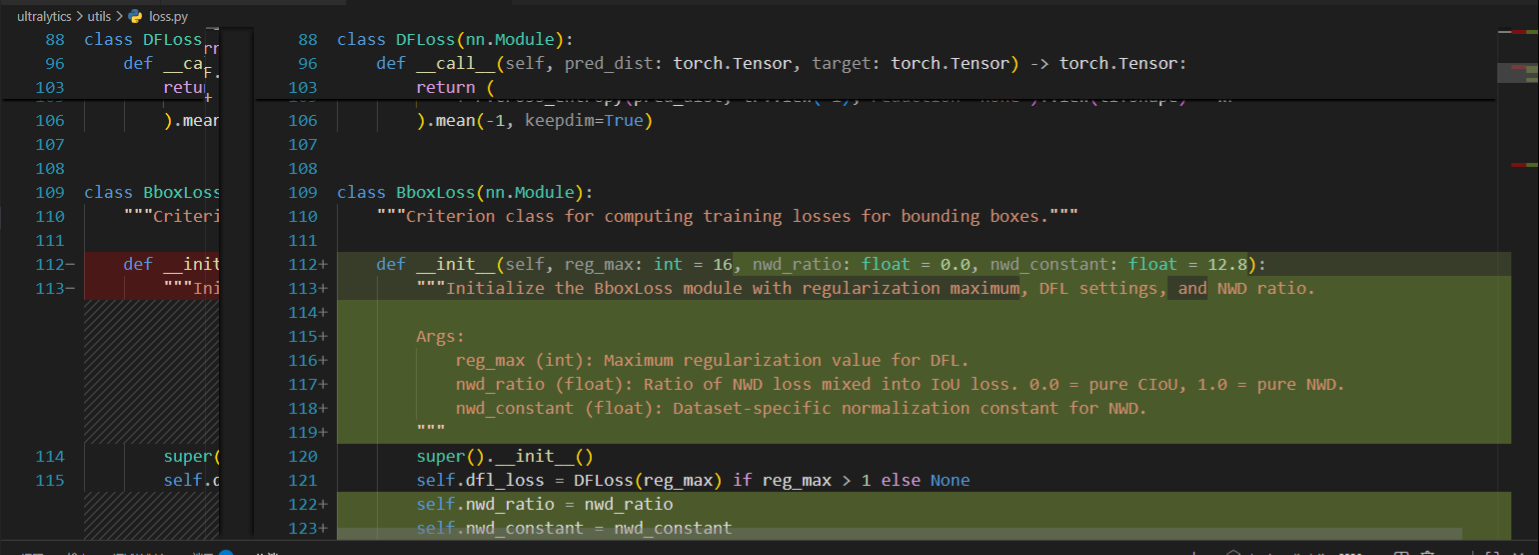
步骤 2.3 --- 修改 BboxLoss.forward,混合 NWD 损失:
Matlab
# 原有 CIoU 损失
iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, CIoU=True)
loss_iou = ((1.0 - iou) * weight).sum() / target_scores_sum
# 新增:NWD 损失混合
if self.nwd_ratio > 0:
nwd_loss = wasserstein_loss(
pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, constant=self.nwd_constant
)
loss_iou = (1.0 - self.nwd_ratio) * loss_iou + \
self.nwd_ratio * ((nwd_loss * weight.squeeze(-1)).sum() / target_scores_sum)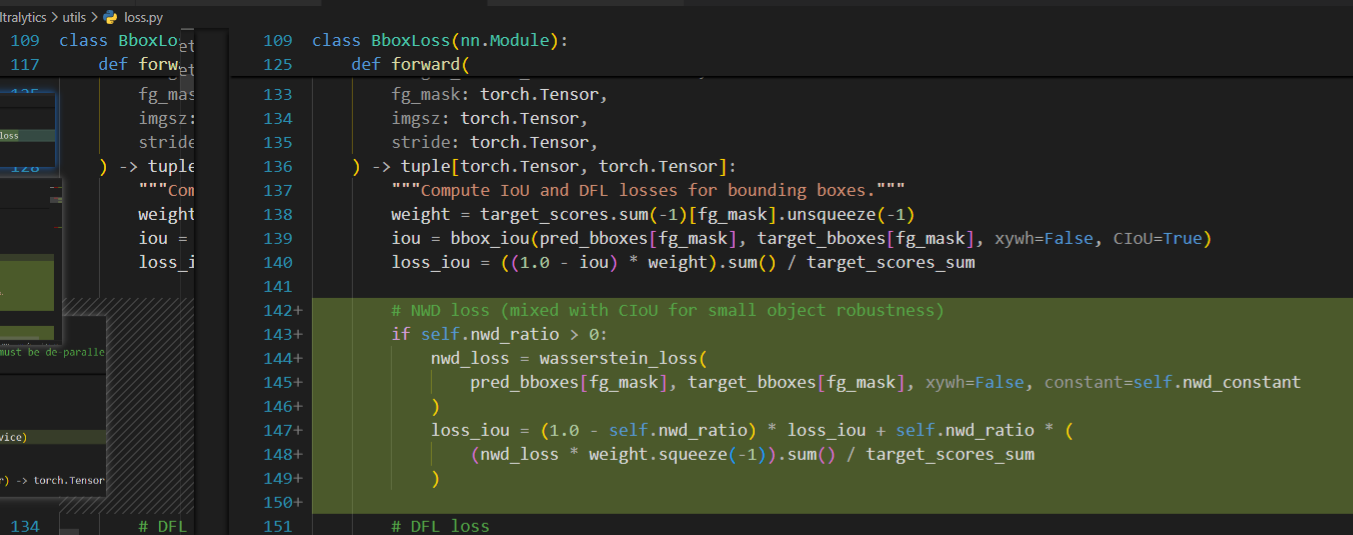
步骤 2.4 --- 修改 v8DetectionLoss.__init__,传递 nwd_ratio:
Matlab
self.bbox_loss = BboxLoss(m.reg_max, nwd_ratio=getattr(h, "nwd_ratio", 0.0)).to(device)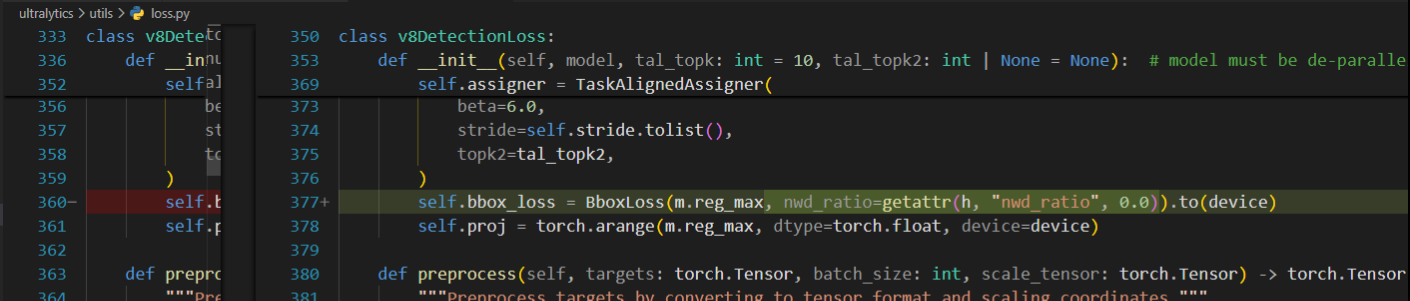
5.3 修改 ultralytics/cfg/default.yaml
添加新的超参数:
Matlab
nwd_ratio: 0.0 # (float) NWD loss mixing ratio. 0.0 = pure CIoU, 1.0 = pure NWD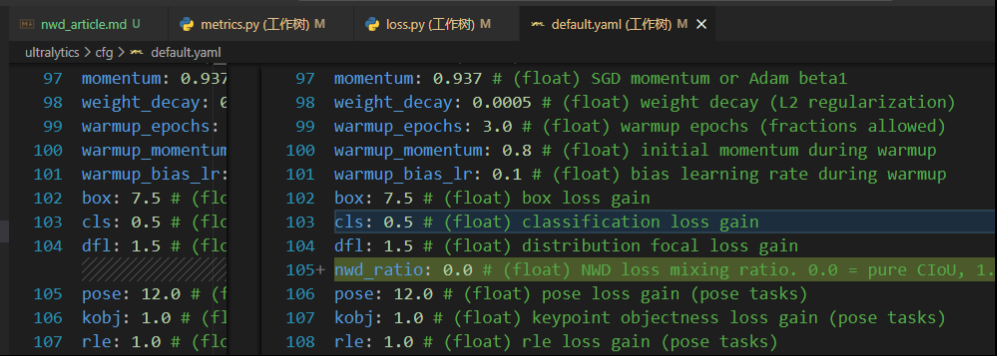
5.4 训练
Matlab
# 基线训练(纯 CIoU)
yolo detect train data=VOC_YOLO/data.yaml model=yolo11n.yaml nwd_ratio=0.0
# NWD 混合训练(推荐 nwd_ratio=0.3~0.5)
yolo detect train data=VOC_YOLO/data.yaml model=yolo11n.yaml nwd_ratio=0.5
# 或使用训练脚本
python train_nwd.py5.5 结果对比
训练完成后,对比两个实验的关键指标:
| 实验 | nwd_ratio | 说明 |
|---|---|---|
| baseline | 0.0 | 纯 CIoU(对照) |
| nwd_exp | 0.5 | CIoU + NWD 混合 |
关注指标:
- •
mAP@50和mAP@50-95:整体精度 - •
AP_small:小目标精度的提升 - • 小目标类别(如 Dent、Crack)的逐类 AP
六、超参数调优建议
| 参数 | 说明 | 推荐值 |
|---|---|---|
nwd_ratio |
NWD 混合比例 | 小目标多 → 0.50.7;均衡 → 0.30.5 |
nwd_constant (C) |
归一化常数 | 默认 12.8(AI-TOD);可根据数据集物体平均尺度调整 |
box |
框损失权重 | 使用 NWD 时可能需要微调,建议从默认 7.5 开始 |
进阶建议
-
- NWD + P2 检测头:配合 P2 层使用,P2 层输出 160×160 特征图,对小目标更敏感,与 NWD 形成互补
-
- NWD + Focal Loss:分类用 Focal Loss 处理类别不均衡,回归用 NWD 提升小目标精度
-
- NWD 替换 Label Assignment:除了作为回归损失,NWD 还可以替代 IoU 用于标签分配(TaskAlignedAssigner),实现更合理的正负样本匹配
参考资料
- • Wang et al. A Normalized Gaussian Wasserstein Distance for Tiny Object Detection. AAAI 2022.
- • 论文 arXiv:2110.13389
- • 官方代码
- • YOLOv11 Ultralytics