文章目录
- 无人机航拍俯视小目标检测|多色彩场景交通基建航空船舶识别数据集
- 数据集概览
- 数据集亮点
- 适用方向
- [YOLOv8 训练与推理代码(带场景经验注释)](#YOLOv8 训练与推理代码(带场景经验注释))
-
- [1. 数据集目录结构](#1. 数据集目录结构)
- [2. 数据集配置 data.yaml](#2. 数据集配置 data.yaml)
- [3. 训练代码(航拍小目标优化参数)](#3. 训练代码(航拍小目标优化参数))
- [4. 推理代码(高空小目标优化)](#4. 推理代码(高空小目标优化))
- [在这里插入图片描述 !在这里插入图片描述(https://i-blog.csdnimg.cn/direct/0d53575ceb2143fda7fd82388bd51f16.png) 希望以上信息可以帮助你更好的构建计算机视觉平台,专注致力于目标检测建设10128](#在这里插入图片描述
 希望以上信息可以帮助你更好的构建计算机视觉平台,专注致力于目标检测建设10128)
希望以上信息可以帮助你更好的构建计算机视觉平台,专注致力于目标检测建设10128)
- 标签
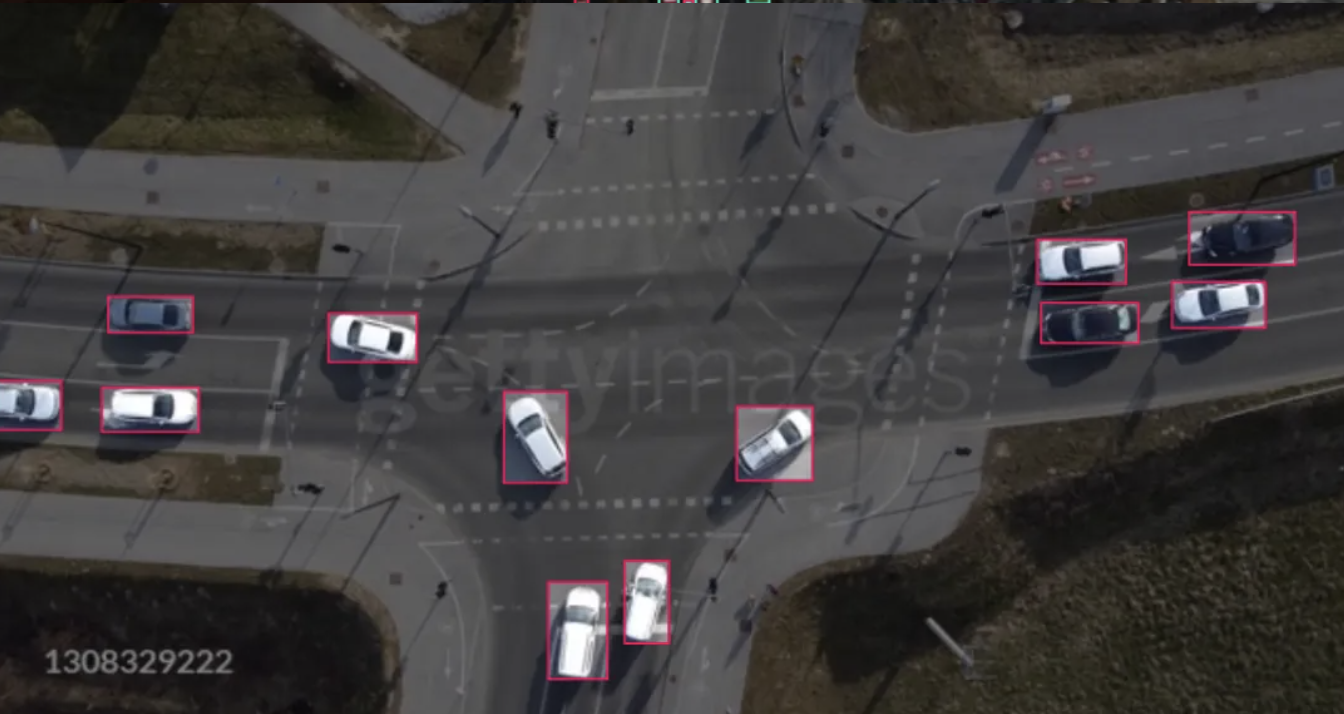
无人机航拍俯视小目标检测|多色彩场景交通基建航空船舶识别数据集
在城市交通、基建巡检、空域监控、海事监管等场景中,无人机高空鸟瞰小目标检测 正成为智能化感知的核心刚需。高空俯视、目标尺寸小、背景复杂、色彩干扰大,是当前算法落地的主要难点。本数据集专为多色系、多场景、小目标检测设计,可显著提升复杂环境下目标识别精度,快速支撑交通、基建、航空、航海一体化视觉检测系统开发。

数据集概览
本数据集为无人机航拍俯视视角目标检测数据集,以BGR、RED、TI三大色彩体系为核心维度,对飞机、桥梁、建筑、汽车、跑道、船舶等对象做精细化区分,搭配通用车辆类别,形成覆盖多场景的细粒度检测体系,特别适合高空小目标、色彩区分、多类别共存场景。
核心信息
| 信息类别 | 详情 |
|---|---|
| 数据集类型 | 目标检测数据集,多色彩细分类 |
| 数据规模 | 300张航拍俯视标注图像 |
| 标注格式 | YOLO标准格式,开箱即用 |
| 适用场景 | 交通监测、基建巡检、空域识别、海事监控 |
数据集亮点
- 色彩维度细分:基于BGR、RED、TI色系做对象区分,解决特殊涂装/标记/光照下的误检问题。
- 目标覆盖全面:包含飞机、桥梁、建筑、汽车、卡车、跑道、船舶等多领域目标。
- 俯视视角统一:纯鸟瞰图,与真实无人机巡检视角完全一致,小目标特征突出。
- 工程友好:YOLO格式,无需转换,直接对接YOLOv5/v7/v8等主流框架训练。
适用方向
- 交通场景:车辆、道路、桥梁智能检测与流量统计。
- 基建场景:建筑、桥梁、跑道状态巡检与异常识别。
- 航空场景:飞机、跑道空域目标监控。
- 海事场景:水面船舶监控。
- 算法研究:多色彩环境、小目标、复杂背景下的检测模型优化。

YOLOv8 训练与推理代码(带场景经验注释)
1. 数据集目录结构
dataset/
├── train/
│ ├── images/ # 训练图片
│ └── labels/ # 训练标注
├── val/
│ ├── images/ # 验证图片
│ └── labels/ # 验证标注
└── data.yaml # 配置文件2. 数据集配置 data.yaml
yaml
# 无人机航拍多色彩小目标检测配置
train: ./train/images
val: ./val/images
# 类别数量按数据集实际填写
nc: 65
# 类别名称替换为数据集真实类别
names: ["飞机1","桥梁1","建筑1","汽车1","跑道1","船舶1",...,"卡车"]3. 训练代码(航拍小目标优化参数)
python
from ultralytics import YOLO
# 加载YOLOv8预训练模型
# 小目标航拍场景优先使用yolov8s/m,兼顾精度与速度
model = YOLO("yolov8s.pt")
# 无人机小目标检测训练(行业经验参数)
if __name__ == "__main__":
model.train(
data="data.yaml", # 数据集配置
epochs=120, # 小样本+细分类别适当增加轮数
imgsz=960, # 小目标必须提升分辨率,优于640
batch=4, # 高分辨率适当降低batch防止爆显存
device=0, # 使用GPU
lr0=0.01, # 航拍小目标学习率经验值
lrf=0.01,
momentum=0.937,
weight_decay=0.0005,
warmup_epochs=3.0, # 稳定训练
hsv_h=0.015, # 色彩增强,适配多色系数据集
hsv_s=0.7,
hsv_v=0.4,
degrees=10.0, # 无人机姿态抖动增强
flipud=0.2, # 俯视允许上下翻转
fliplr=0.5,
patience=15, # 早停防止过拟合
name="drone_smallobject"
)4. 推理代码(高空小目标优化)
python
from ultralytics import YOLO
import cv2
# 加载训练好的无人机小目标模型
model = YOLO("./runs/detect/drone_smallobject/weights/best.pt")
# 航拍小目标推理:降低置信度,提高小目标召回率
results = model.predict(
source="test.jpg", # 测试图/视频/RTSP流
conf=0.2, # 小目标降低置信度
iou=0.45, # 放宽NMS避免小目标被抑制
imgsz=960, # 与训练尺寸一致
show=True, # 实时显示
save=True # 保存结果
)
# 输出巡检识别结果
for r in results:
for box in r.boxes:
cls_name = r.names[int(box.cls)]
conf = round(float(box.conf), 2)
print(f"[无人机检测] 目标:{cls_name} 置信度:{conf}")
希望以上信息可以帮助你更好的构建计算机视觉平台,专注致力于目标检测建设10128
标签
#无人机航拍检测 #小目标检测 #俯视目标检测 #交通AI识别 #基建巡检 #航空识别 #船舶检测 #YOLOv8实战 #多色彩目标检测 #智能巡检数据集