熠速推出的PolarLabBox快速控制原型机,支持工程师利用Simulink模型快速验证算法,做到了仿真到实物的快速实现。本文将以永磁同步电机的无感控制为例,带领大家如何在PolarLabBox上8小时实现优异性能的控制算法。
想要实现全速域控制,零速带载闭环启动、正反转切换是不可避免的难点。传统的IF强拖-滑模观测器+锁相环(SMO+PLL)的策略仅能实现开环启动,且低速效果极差。高频注入(High Frequency Injection, HFI)在低速域的效果优异但由于高频信号注入存在较大的噪音。本文使用一种基于有效磁链的混合型磁链观测器,一套算法不改动任何参数,即可完成PMSM全速域的无位置传感器控制。
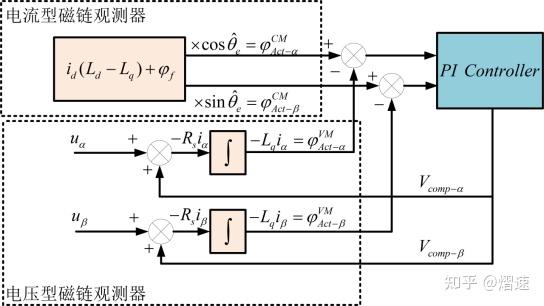
-电压型磁链观测器-


-电压-电流混合型有效磁链观测器-
定子磁链除了可以被电压形式表达之外,还可以表达为以下的电流形式

相比起电压模型,电流模型无需积分,但需要知晓转子位置信息,无法用其来主动估算转子位置。
考虑到电压模型的痛点,扰动需要被补偿:
设计以下形式的有效磁链观测器:
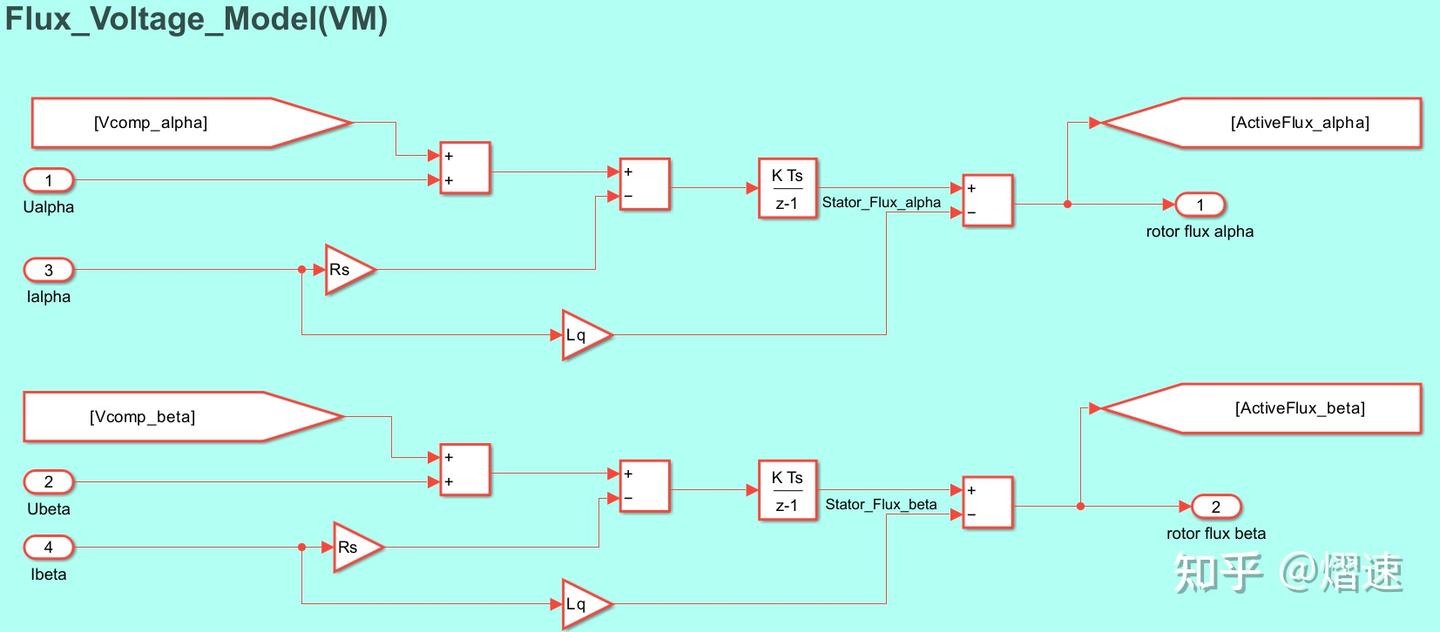
电压型有效磁链观测器按照下式来估算有效磁链(上标VM表示Voltage Model)

模型如下:
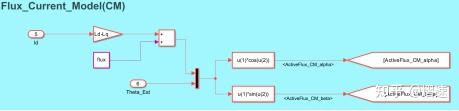
电流型有效磁链观测器按照下式来估算有效磁链(上标CM表示Current Model):

模型如下:

控制框图如下:

-问题的解决-
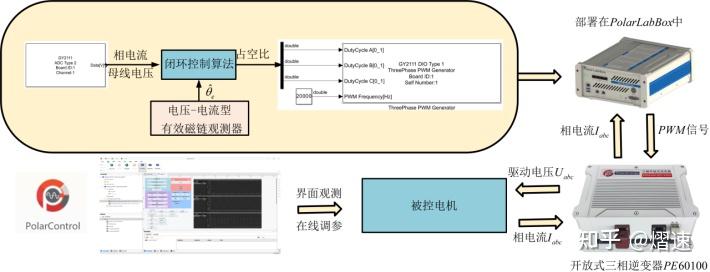
其中,PolarControl是PolarBox全家桶中的上位机软件,支持在线观测波形、修改控制参数、记录波形等功能;PolarEnergy作为逆变器,生成电机所需要的驱动电压。
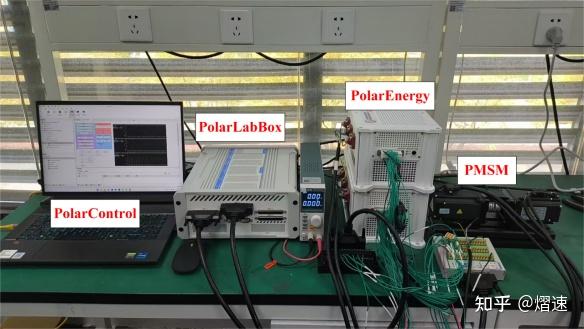
-实验平台-
我们将在下面的基于PolarLabBox的实验平台中实现上述控制算法。其中,采样频率20kHz(PolarEnergy支持最高25kHz开关频率)。状态观测和参数下发均由PolarControl实现。PMSM对拖平台的陪试电机恒定施加约50%负载转矩,力矩控制算法同样运行在PolarLabBox中。此外,受试电机额定转速1000rpm24Vdc。
观察全速域控制效果:设置梯形转速指令**-1.0额定速度~1.0额定速度** (-1000RPM~1000RPM)以及方波转速指令**-0.01额定速度~0.01额定速度**(-10RPM~10RPM)带50%负载启动转速波形、角度波形和磁链波形如下所示。
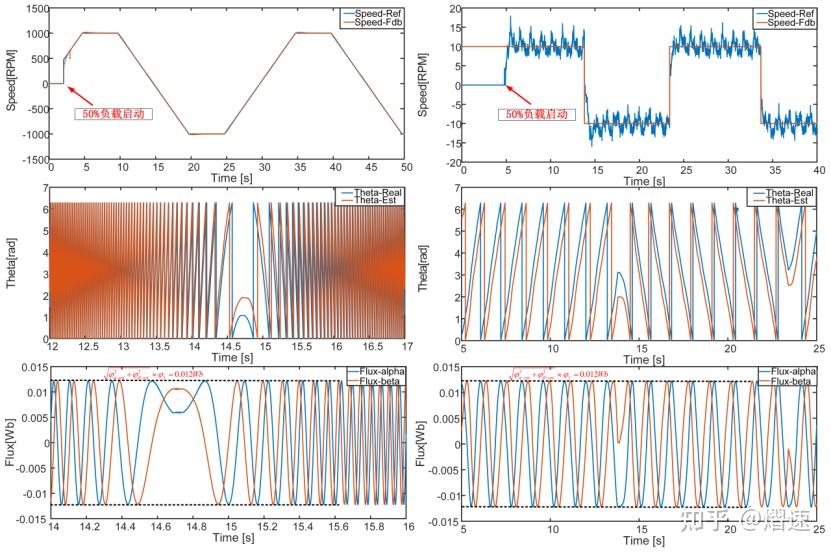
不难看出,在50%额定负载启动的情况下,本文所设计电压-电流型有效磁链观测器在PolarLabBox中得以快速验证,零速闭环带载启动效果、全速域控制效果、正反转效果性能优异。