一、前期准备:
下载软件SenseCom 及相关插件
地址:
https://github.com/Adjuvo/SenseGlove-Unity
下载并解压完后:
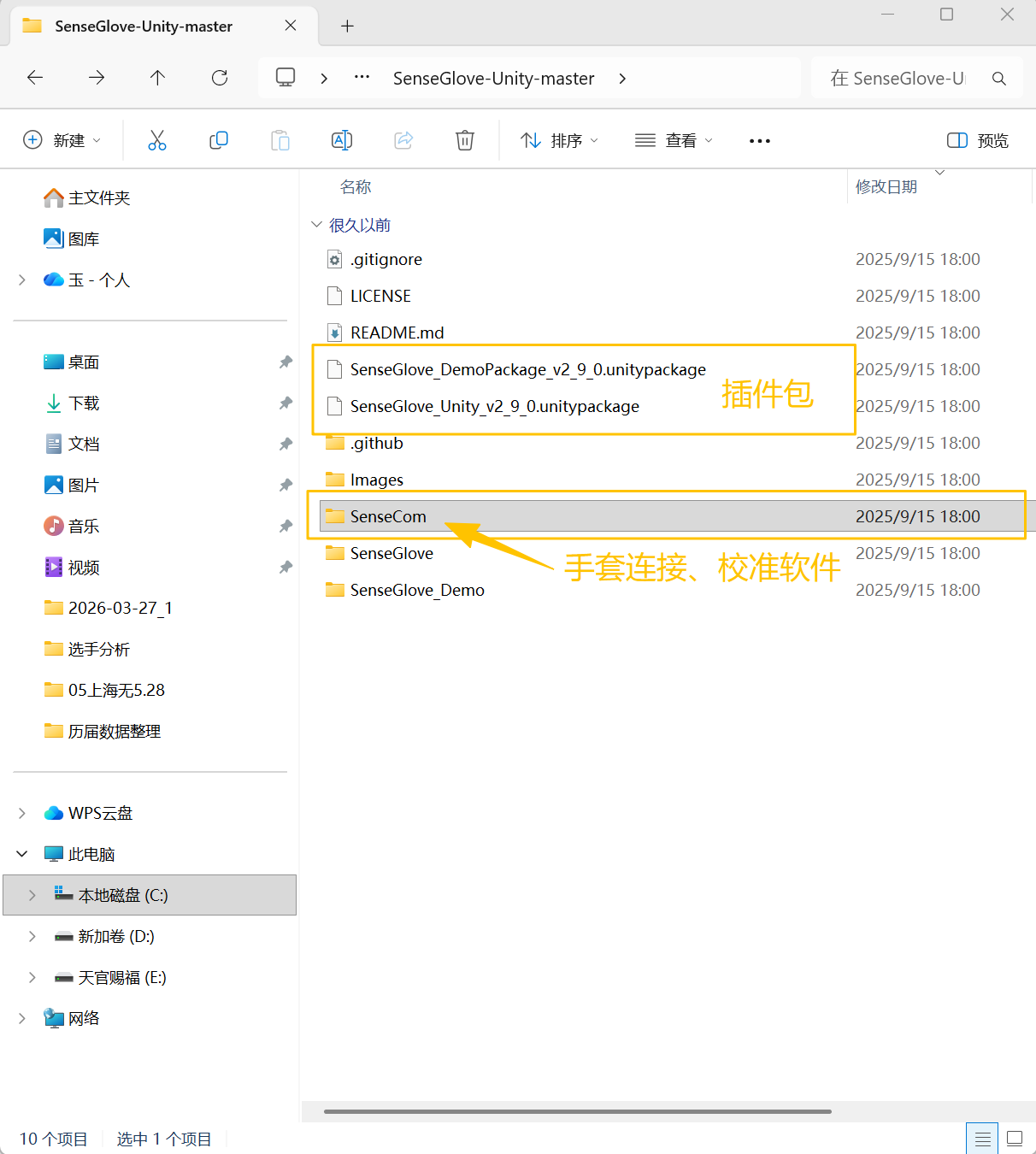
二、创建unity项目并导入插件
我创建的是unity2022.3.2的项目。建议创建2019以上长期支持的unity版本。
打开unity后
先导入SenseGlove_Unity_v2_9_0.unitypackage
然后导入SenseGlove_DemoPackage_v2_9_0
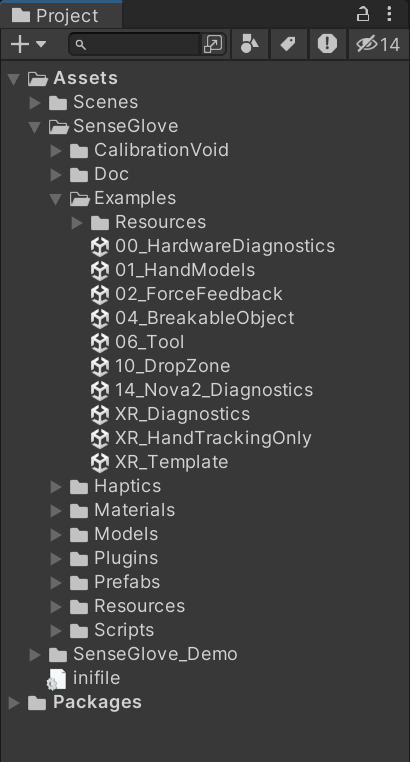
导入完毕后: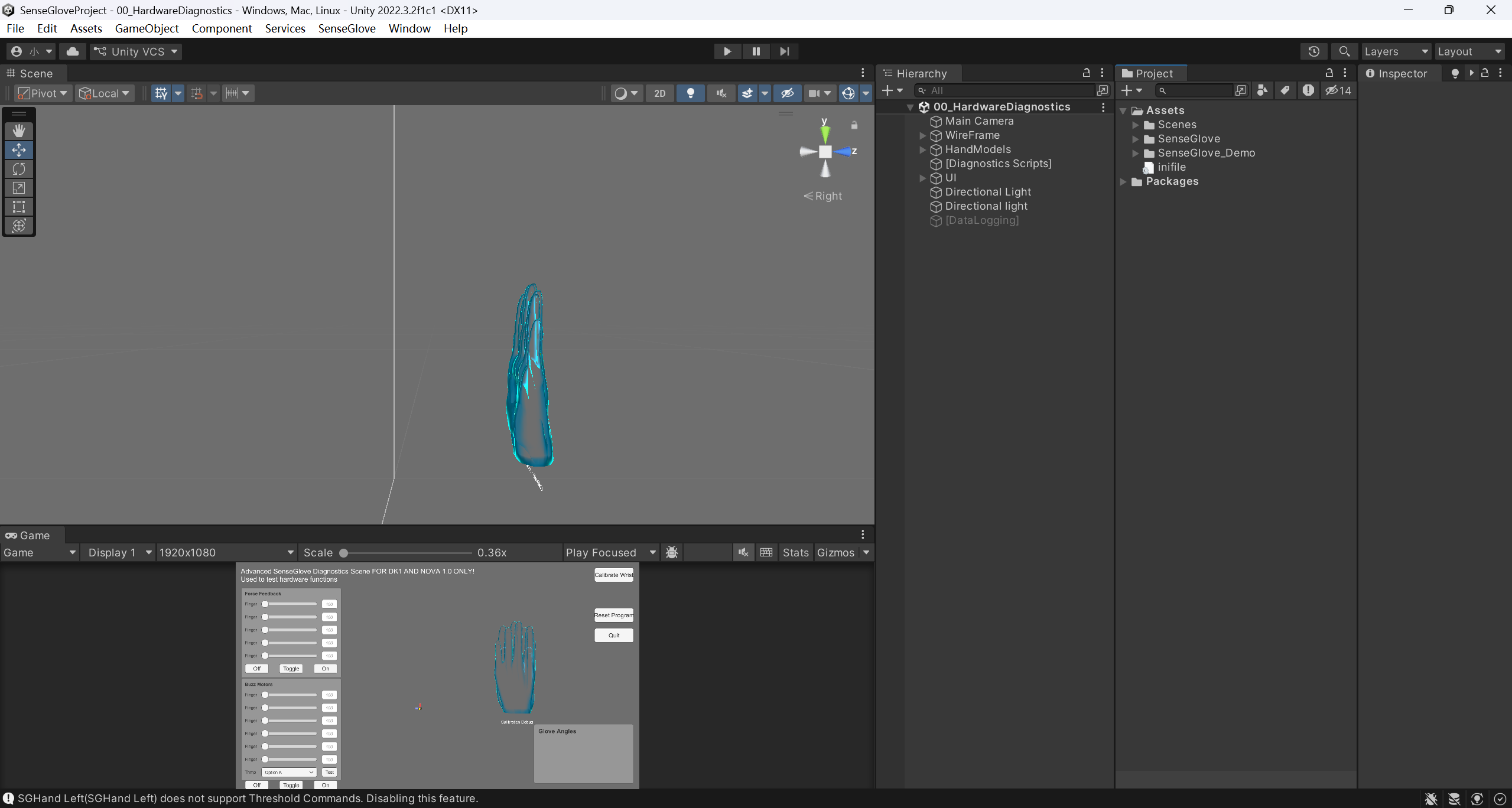
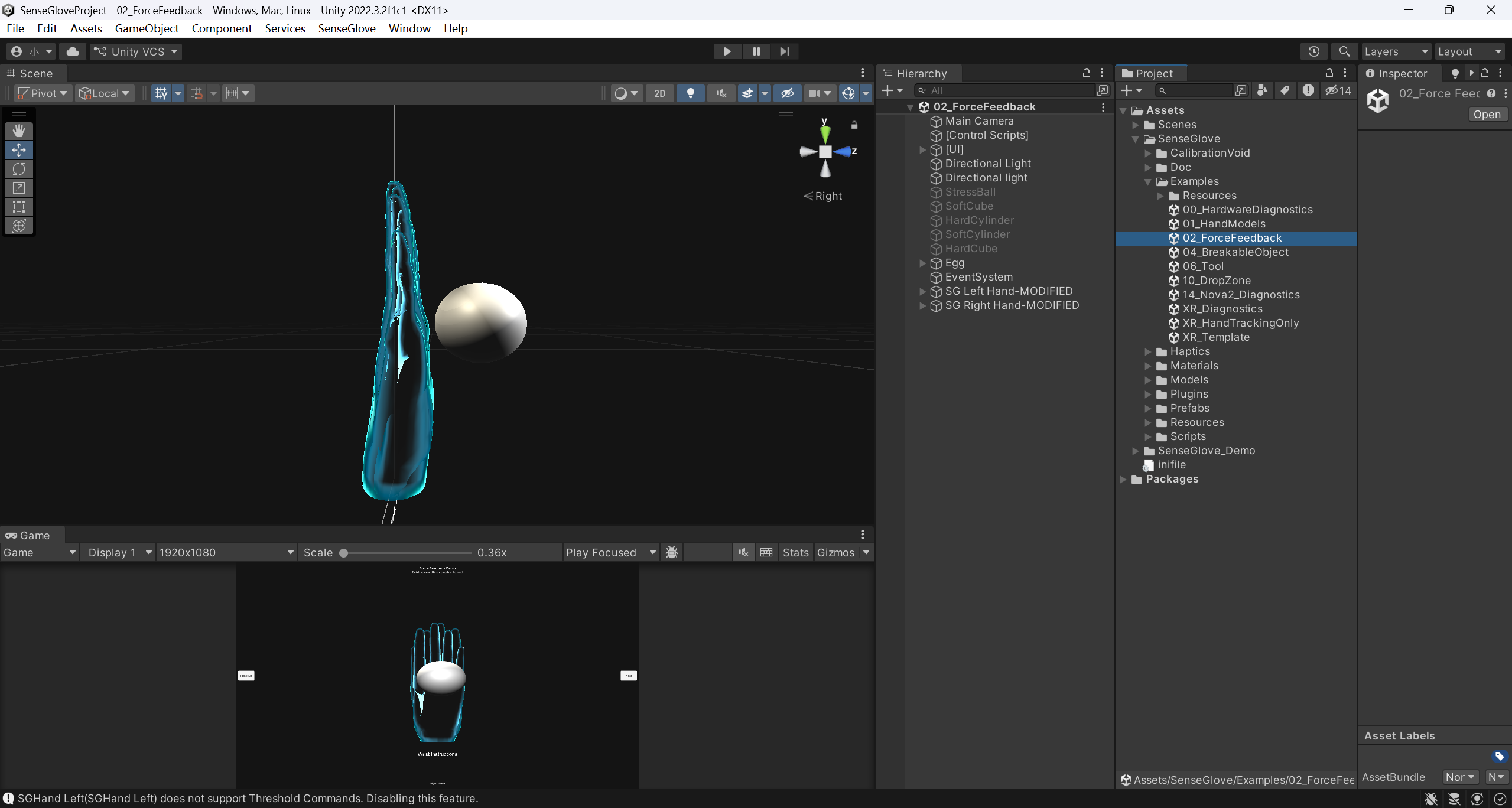
案例场景在这里:
三、打开手套、安装对应软件

打开下载的SenseCom文件夹
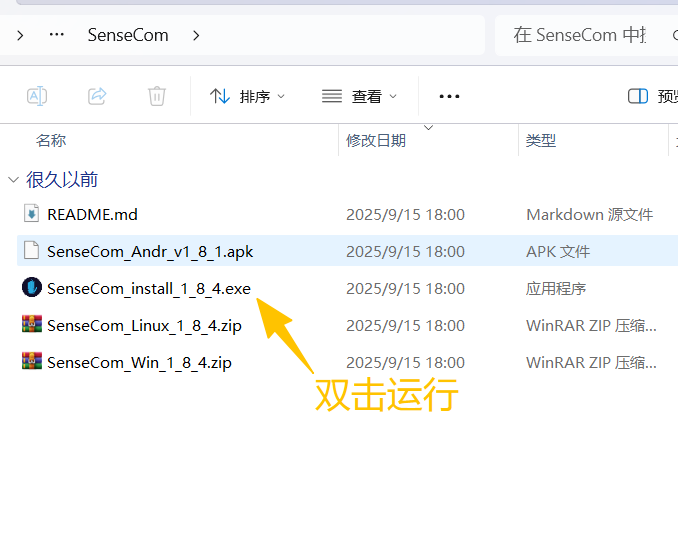
直接双击运行SenseCom_install_1_8_4.exe
同意风险并安装
四、手套连接校准、并在工程中体验效果
打开长类似这样,如果没连手套就是空白的。
虽然是用蓝牙连接,但是是使用软件连接手套而不是电脑蓝牙那个界面。因为蓝牙换成耗能更低的那种方式了。电脑自带的蓝牙连接不好使。
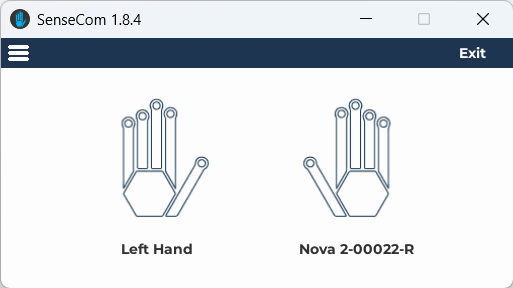
打开SenseCom软件后,短按两个手套的电源键,指示灯应为蓝色闪烁
(手套指示灯蓝色闪烁是待连接、蓝色常亮是已连接、红色是没电、绿色是在充电)
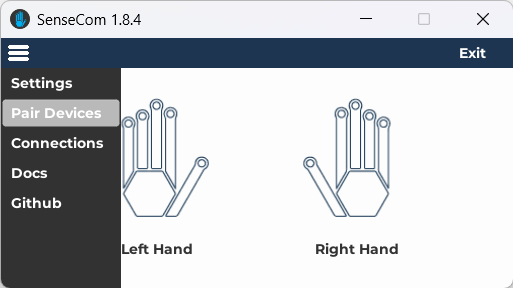
点击软件左上角的三 ,选择PairDevices。
显示手套名称,依次点击右侧的连接按钮
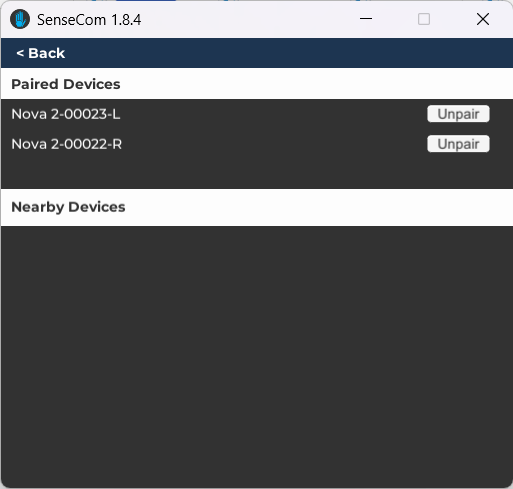
连接到手套后返回界面:
穿戴好手套并点击手套的松紧按钮后 点击软件的Calibrate进行矫正手套姿势
矫正完毕后可以打开unity工程中的示例内容进行体验(都还挺好玩的可以试试看)
调试的话打开这个场景:14_Nova2_Diagnostics
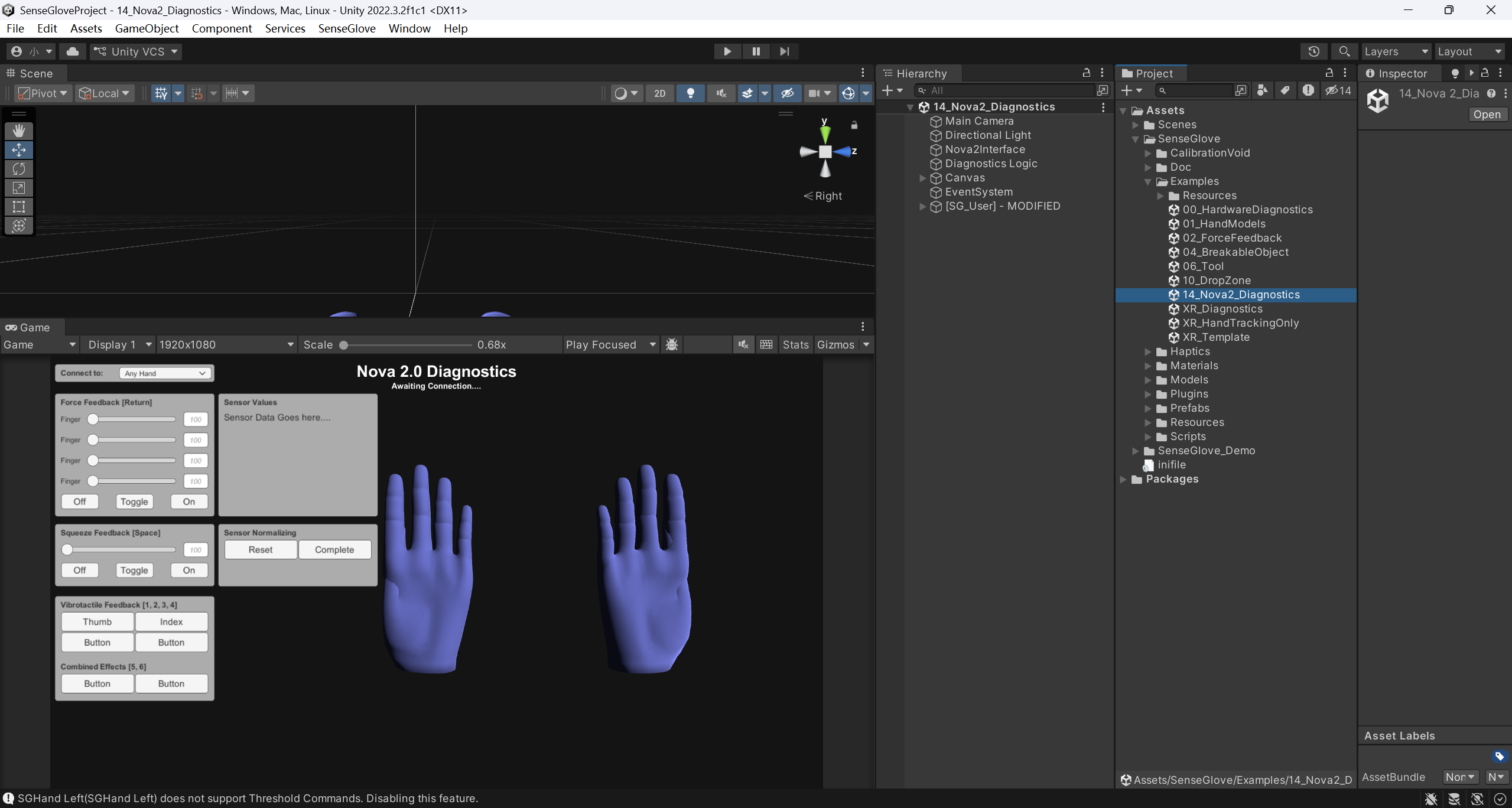
五、初步调试完成
因为我要做focus3 + SENSEGLOVE NOVA 2手套。还在逐步研究。