TSDD-UB: A Texture Simplification-Based Denoising Diffusion Model for Unsupervised Defect Detection Under Ultrasonic B-Scan Signal
去噪扩散模型;无损检测;纹理简化网络;超声B超信号;无监督缺陷检测。
1. 介绍
超声 B 扫信号在管道缺陷检测中应用广泛。
在超声波检测中,B 扫描信号是由一系列沿特定方向排列的A 扫描信号组成的二维表示,它能全面呈现管道横截面,准确反映缺陷的位置和形状。
传统的B 扫描信号缺陷检测依赖人工目视检查,存在效率低且高度依赖专家经验的问题7。
早期,提出基于 FasterRCNN、YOLO的方法,用于相控阵超声检测(UT)中的缺陷定位与识别,后面引入了数据驱动的核学习方法,效果良好。
然而,由于超声 B扫查数据采集过程中存在成本高昂、数据保密以及缺陷样本稀缺 等问题,监督学习方法的应用效果受到了限制。
相比之下,基于无监督学习的缺陷检测方法仅需正常样本即可完成训练,突破了缺陷样本数量有限的限制,这类方法主要包括基于表示的方法和基于重构的方法。
基于表征的方法(无监督):使用预训练特征提取器对比正常样本与缺陷样本的特征图来检测缺陷。不足:在 ImageNet 等大规模数据集 上训练的预训练特征提取器,偏向于自然图像的统计特征,更关注边缘、形状和色彩模式,而超声 B 超扫描信号则需要聚焦于能反映底层物理特性的细微信号变化和特定纹理模式。因此,这些预训练提取器往往无法捕捉到有效区分 B超扫描信号中正常与缺陷样本的判别性特征。
基于重构的方法(无监督):仅在正常样本上训练的生成模型,能够对正常样本进行精准重建,却无法复现缺陷样本,通过分析潜在空间的重构误差来检测
缺陷。不足:由于重建质量有限,性能往往未达最优。但目前去噪扩散模型为该领域带来了新的活力。但实验表明,该方法用于超声 B 型扫描信号时,直接效果不好。
分析原因:
- 超声波的幅度衰减现象降低了主回波的对比度,导致外部管道缺陷的特征特征模糊;
- 超声波的幅度振荡加上显著的噪声干扰,使得B型扫描信号形成了复杂的纹理结构。
受人类能够轻松识别简化图像中缺陷的能力启发,本文提出了一种基于纹理简化的去噪扩散模型用于超声B 扫信号下的缺陷检测,将其命名为 TSDD-UB。首先,设计了一种自适应时间增益补偿 (ATGC)方法,以缓解超声信号幅度随传播距离的衰减,保证信号强度的一致性。其次,提出了混合高斯纹理简化 (HGTS)网络,该网络将B 扫信号中的复杂纹理替换为简化结构,旨在减轻后续重建模型的负担、提升重建质量。第三,提出了一种基于扩散模型的双尺度噪声重建(DNSR)网络,以进一步解决重建质量低下的问题,。贡献如下:
- 提出了一种无监督超声 B型扫描信号缺陷检测方法,该方法将B型扫描信号分析的专家经验融入去噪扩散模型中,以实现更精准的重建。
- 提出一种基于超声原理的 ATGC 方法,可有效解决超声信号幅值随传播距离衰减的问题,从而降低缺陷检测中的漏检
率。 - 提出了一种 纹理简化网络和一种双噪声尺度重构网络,以改进从数据和模型两个角度提升重建质量。
2. 方法
2.1 概述
为提高超声 B 扫信号缺陷检测的准确率,本文提出一种新型无监督缺陷检测框架,即TSDD-UB。该方法的结构如下图所示,由以下三个阶段组成。
- 第一阶段(ATGC):提出一种 ATGC 方法,通过基于超声传播调整补偿系数,增强B型扫描信号中的主底波对比度。此外,引入一种在线缺陷合成方法,采用随机滚动和复制的方式生成缺陷,用于训练 HGTS 和缺陷分割网络。
- 第二阶段(混合高斯纹理简化网络,HGTS):提出一种混合高斯纹理简化网络(HGTS)用于减少 B型扫描信号中的复杂纹理结构,该网络基于函数逼近理论,利用有限个高斯函数对原始信号进行逼近和简化。此外,设计了一种回声聚焦损失函数,用于保留B型扫描信号中的关键峰值特征。
- 第三阶段(DNSR 与缺陷分割):一种利用去噪扩散模型噪声敏感性特征的DNSR方法,生成两组在正常区域保持一致的重建结果,且在缺陷区域出现偏差,而U-Net 分割网络利用这些重建结果之间的不一致性来识别并定位缺陷。
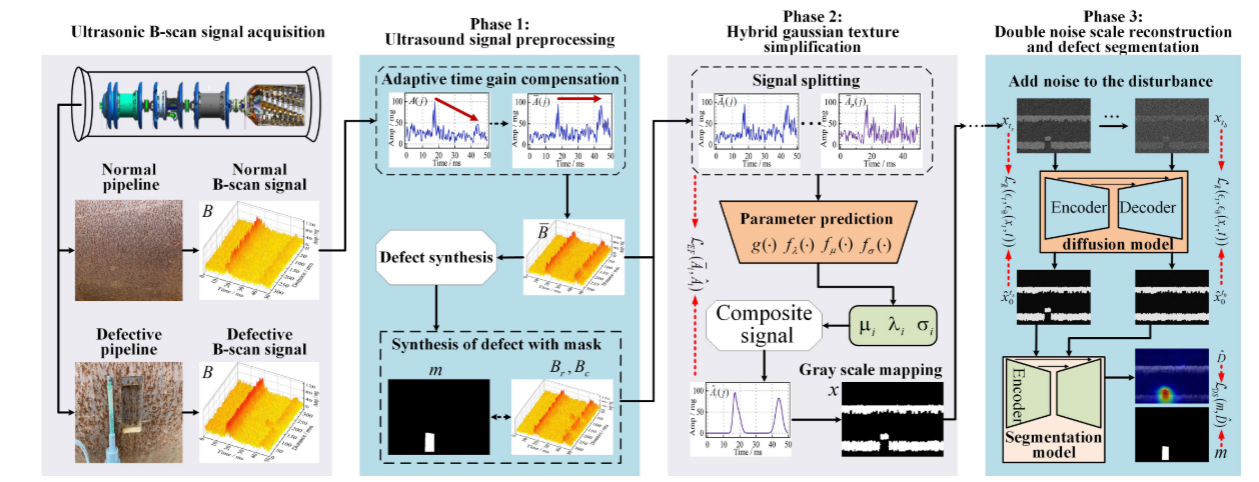
提出了该方法的框架。首先,由超声波内探头采集反映管道状态的B超信号B。其次,用自适应时间增益补偿B,以产生清晰的B扫描信号B'。在B'的基础上,在线合成缺陷数据BC和BR,用于训练后续的HGTS网络和缺陷分割网络。然后,在由B'、BC和BR组成的数据集上训练HGTS网络,以生成具有简化的纹理和清晰的回波特征的信号Bˆ。随后,信号Bˆ的灰度图x被馈送到DNSR网络,通过两个尺度RES的噪声破坏和重建操作产生ˆXTS0和ˆXTB0。
2.2 超声信号预处理
2.2.1 时间增益补偿
为克服超声振幅衰减导致的首个底波对比度降低问题,本文提出一种 ATGC 方法。该方法可自动计算补偿因子以抵消信号的指数衰减,从而在无需人工调整的情况下增强首个底回波的振幅。
- 自适应时间增益补偿:在考虑反射效应时,超声波信号A(j)的幅度随传播距离的变化规律如下:

其中R(S J)是传播介质的反射系数。我们的目的是找到一个补偿律G(J),使得回波位置处的超声信号的能量|A(J)|总是恒定的,sin(j):超声信号震荡,e是指数项衰减,它可以表示为:

其中,c是常量,sign (A (j)) 就是告诉你:当前信号是正半周还是负半周。补偿滤波器G(J)定义如下:

在实际检测任务中,管材是固定的,反射系数R(S J)是恒定的,所以(c·sign(A(J)/(R(S J)I0)=c是固定系数,补偿定律G可以进一步改写为:

归一化方法可以消除常数项对超声信号幅度的影响。然而,获得衰减系数α是一项艰巨的挑战。虽然管壁材料存在理论衰减系数,但实际检测环境的复杂性使其极易受到干扰,导致实际衰减系数明显偏离理论值。
考虑到,如果补偿规则G(J)的参数α与最优参数α∗完全相同,则从超声信号的上半部分获得的能量和响应应该等于下半部分的能量和响应,其可以表示如下:

虽然(9)的推导过程在理论上是不可逆的,但我们通过实验证明了逆导出是有效的。
然而,利用孤立的超声扫频信号来求解衰减参数α是次优的,因为它容易受到噪声的影响。因此,我们使用B扫描信号中的所有A扫描信号来求解唯一的衰减系数,表达如下:
因此,通过解(11),可以获得最佳衰减系数α∗
随后,通过以下方式获得增益补偿之后的A扫描信号A'I和B扫描信号B'

2.2.2 在线缺陷合成
:鉴于先验缺陷信息的不可用性,提出了一种在线缺陷合成策略,用于训练纹理简化网络和缺陷分割网络。我们的目的不是让模型学会所有真实缺陷的样子!
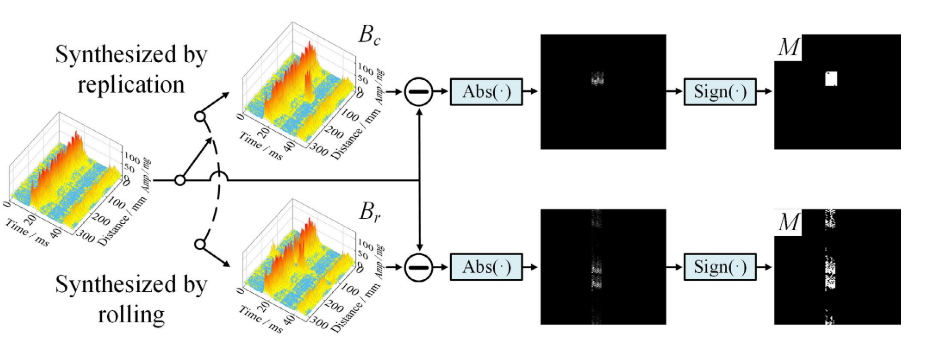
我们的策略通过随机复制和滚动 B 扫描信号来合成缺陷,这更接近由壁厚减少引起的真实缺陷样本。合成缺陷的掩码定义:

其中,Br和Bc分别表示通过随机滚动和复制获得的合成缺陷样品。
值得注意的是,缺陷合成TSDD-UB背后的动机并不是使模型能够学习所有可能缺陷的特征 。具体地说:
1)由于回波位置的有限分布,纹理简化网络只需要少量的样本就能获得对回波的拟合能力;
2)对于缺陷分割网络,缺陷被定义为重建之间的不一致区域,而不是根据重建的特征。因此,TSDD-UB的性能不依赖于合成缺陷的数量或质量。
2.3 混合高斯纹理简化网络
由于超声 A 扫回波呈现类高斯分布,且高斯函数具有局部逼近性强、形态平滑、参数易于学习等优势,符合函数逼近理论对基函数的要求,因此本文采用混合高斯函数对 A 扫信号进行拟合与纹理简化。
HGTS 受到函数逼近定理:任意复杂的随机过程 / 复杂函数,都可以用一组简单的基函数(比如高斯函数、平滑核)以任意精度逼近。基于这一原理,A 扫描信号可以用一组高斯函数(如下:

其中,λ、µ和σ分别表示高斯函数的幅度、平均值和标准差,K表示高斯函数的数量。当与足够数量的高斯函数(K→∞)和最优参数λ、µ和σ合并时,拟合信号Aˆ(J)可以与A'(J)相同。随着K的减小,(14)逐渐失去高频拟合能力,从而简化了A扫描信号的复杂纹理结构。
然而,在(14)中,参数λi、µi、σi:i∈(1,.。。,K)是未知的。因此,设计了一个多分支超参数预测网络来精确地获得K组高斯参数(λi,µi,σi)。目前,为了提高回波峰值位置的拟合精度,提出了一种回波聚焦损失函数。
- 超参数预测网络
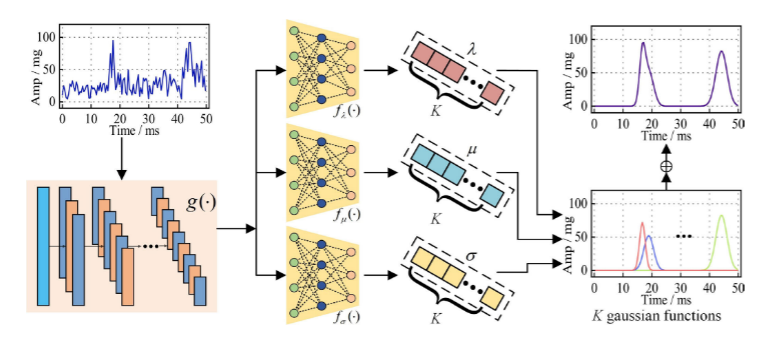
如图5所示,超参数预测网络由一个主干特征抽取器和三个并行的超参数预测头组成。我们对ResNet-1833进行了修改,将其从二维卷积转换为一维卷积,以使其适应超声A扫描信号,并将其指定为特征提取器,记为g(·)。三个并行的超参数预报头由全连接的神经网络组成,每个神经网络有一个单一的隐含层和一个包含K个神经元的输出层。这些头部分别预测K高斯函数的均值(µi)、方差(λi)和标准差(σi),分别表示为fµ(·)、fλ(·)和fσ(·)。具体细节如下。
- 步骤1(特征提取):首先,将超声A扫描信号Ai送入特征抽取器g(·),该特征抽取器产生特征映射Mi∈Rc×H×1

其次,Mi按照通道优先级约定进行级联,得到特征向量Zi∈R(C×H)×1。Ai源自原始和合成的B扫描信号,表示为A'I∈(B∪BC∪BR)。 - 步骤2(超参数预测):将特征向量Zi同时输入到全连接的参数预测头fµ(·)、fλ(·)和fσ(·)。经过非线性映射,得到A'i对应的三组超参数:ui∈rk×1、λi∈rk×1和σi∈rk×1。这个过程可以表示如下:

- 步骤3(信号近似):一旦确定了超参数µi、λi和σi,就唯一地定义了高斯函数的混合。因此,拟合的超声A扫描信号Aˆi被导出如下:

随后,要求拟合信号Aˆi,j与原始输入A'i一致。因此,特征抽取器g(·)和超参数预测头fµ(·)、fλ(·)和fσ(·)必须协作学习超参数的最佳组合,从而将A'i和Aˆi之间的误差降至最低。
- 聚焦回波的损失函数
包含关键缺陷特征的回波(界面波或第一底波)通常只分布在A扫描信号内的几个采样点上。然而,传统的回归损失函数对每个采样点的拟合误差给予相同的权重,这种做法在追求总体损失最小化的过程中往往忽略了回波位置的拟合精度,这可能导致关键缺陷信息的丢失。为了解决上述问题,提出了一种新的聚焦回波损失函数,定义如下:

具体地说,LEF使用相应的A扫描幅度作为每个采样点的拟合误差的权重,确保回波位置的拟合误差(通常以较大的幅度为特征)主导总体损失。通过这种加权策略,网络被引导来更准确地拟合回声区域,有效地保留了关键的缺陷信息。 - 信号到图像
本部分将超声B超信号转换为图像格式,因为这种转换更好地代表了超声波在材料中传播的时空特征,直观地显示了缺陷的空间分布和深度信息,便于深度学习模型捕获和分析复杂的回波模式。具体细节如下。
在使用纹理简化网络对超声A扫描信号A'i,j进行拟合之后,所得到的信号Aˆi,j在具有简化的纹理结构的同时保留了回波峰的特征。随后,将简化的信号Aˆi、j重新组合成信号Bˆi,其定义如下:

最后,将超声B扫描信号样本Bˆ映射到B扫描灰度图像样本x,如下所示:

2.4 DNSR和缺陷分割(DNSR)
现有的基于去噪扩散模型(DDPM)26的缺陷检测方法通常将缺陷定义为输入和重构之间的差值。然而,这些方法往往难以准确地重建包含复杂多样纹理结构 的B扫描信号,从而在正常区域引入失真。为了解决这一问题,提出了一种DNSR方法,该方法使用两种不同尺度的噪声来扰动和重构B扫描信号,并将缺陷定义为这两种重构之间的差值,而不是输入与其重构之间的差值。具体说明如下。
大步长 (t_b):选取足够大的扩散步长 (t_b),能彻底抹除缺陷信息。对超声信号映射得到的灰度图 (x_0) 加入足量噪声后重建,得到无缺陷图像 (\hat{x}_{0}^{t_b})。扩散模型反向去噪前,步长越大、加的噪声越多。噪声足够多时,原本的缺陷特征会被完全覆盖,重建出来的图就看不到缺陷了。问题:这张图的正常区域(尤其边缘)会出现形变 / 失真,容易被误判成缺陷(误检)。
**小步长 (t_s):**改用更小的步长 (t_s) 加噪并重建,噪声量不足,没法遮盖缺陷,重建图 (\hat{x}_{0}^{t_s}) 里缺陷依然保留。加的噪声少,对原图改动小,缺陷特征能完整留下来。
两张图都由同一个模型 (\epsilon_\theta) 重建,所以正常区域的特征高度一致。
本文不和常规方法一样(常规方法:重建图 vs 原始输入图 找差异),而是对比两种步长的重建图之间的差异,以此计算异常得分,大幅降低误检。

其中,ϕ(·,·)是具有U-网结构的缺陷分段网络,使用合成缺陷BC和BR及其对应的掩码m进行预训练,其损失函数定义为平滑L1损失如下:

3. 实验
3.1 训练和推理
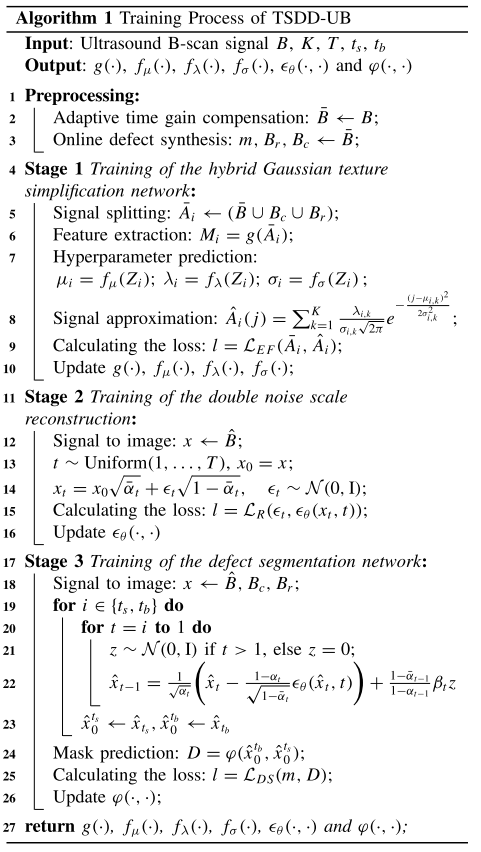
- 1)训练流程:TSDD-UB培训流程分为三个阶段。在第一阶段,训练纹理简化网络。在动态时间增益补偿和合成异常产生之后,原始超声B超信号B被分解成A扫描信号{Ai(J)}pi=1。然后使用这些信号来训练HGTS网络,其损失函数在(18)中定义。在第二阶段,利用无异常B超信号的灰度映射x来训练DNSR网络,以达到精确重建的目的,其损失函数在(2)中定义。在第三阶段,利用合成缺陷在两个时间尺度上的重建ˆx Tb0和ˆxTS0来训练缺陷分割网络。算法1总结了TSDD-UB训练过程。
输入:超声 B 扫描信号B、高斯函数个数K、扩散总步数T、小噪声步长(t_s)、大噪声步长(t_b)
输出:特征提取网络(g(\cdot))、高斯均值预测网络(f_\mu(\cdot))、高斯幅值预测网络(f_\lambda(\cdot))、高斯方差预测网络(f_\sigma(\cdot))、扩散噪声预测网络(\epsilon_\theta(\cdot,\cdot))、缺陷分割网络(\phi(\cdot,\cdot))
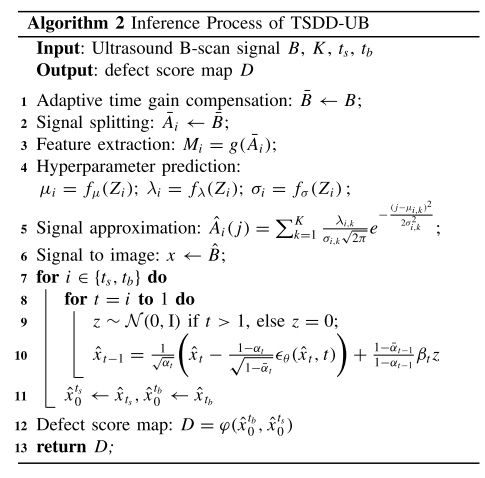
- 2)在推理阶段,将图像重建定义为一个逆马尔可夫链。重建图像xˆ0由模型ˆxT、ˆx逐渐恢复
3.2 数据采集
实验数据是使用图6(A)所示的实验平台获得的,测试管道如图6(B)所示。管道由X65高碳钢制成,长约100m,公称尺寸12英寸,外径323.9 mm。它包括各种人为和自然产生的腐蚀缺陷,如图6©-(E)所示。在检测过程中,采用高分辨率线聚焦水耦合压电超声内部检测进行信号采集。机器人的平均运行速度为1.11m/S,工作压力为2.65兆帕,以原油为耦合介质。采样间隔设置为3.30 mm。
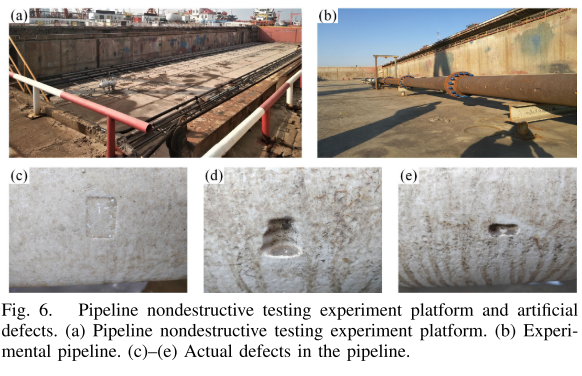
为了评估缺陷检测能力,从不同壁厚的管道上采集了两组B超信号。第一组数据集命名为DataSet-127,来自一条壁厚为12.7 mm的管道,包含517个正常样本和183个缺陷样本 。第二组为数据集-175,采集自一条壁厚为17.5 mm的管道,包括363个正常样本和102个缺陷样本。图7示出了在各种流水线条件下的典型超声B扫描信号。样品包括正常管段、内部缺陷、外部缺陷、外部点蚀缺陷、冲击缺陷和穿孔缺陷。这些信号最终被表示为大小为114×128×1的矩阵,并用于实验验证。
3.3 性能评估指标与实验设置
我们评估图像和像素级别的缺陷检测性能。对于图像级别,我们报告了接收器算子特征曲线下的面积(I-AUROC)作为主要度量,通过一类分类方法利用异常图中最大和最小像素之间的差值来计算。在像素级别,我们使用像素AUROC(P-AUROC)、每区域重叠(PRO)和平均精度(AP)。虽然P-AUROC在像素级测量定位,但它往往会受到正常像素数较多的影响。PRO和AP对每个像素一视同仁,这为像素级异常检测提供了更全面的评估。此外,我们还包括假阳性率(FPR)、假阴性率(FNR)和F1评分(F1),它们在工业应用中特别关键。
在我们的研究中,我们使用ADAM算法来优化网络参数。对于HGTS网络,我们将混合高斯函数的个数设置为K=5,将学习速率初始化为10−3,应用10−4的权值衰减,进行了1000个历元的训练,批大小为128。对于DNSR网络,我们加入了步长T=1000,Tb=600,ts=200的噪声,将学习速率初始化为10−4,包括10−5的权值衰减,并以4批大小训练3000个历元。
实验采用PYTORCH框架进行,所使用的工作站是:Intel Core i5-12600KF CPU和NVIDIA GeForce RTX 4070Ti Super。
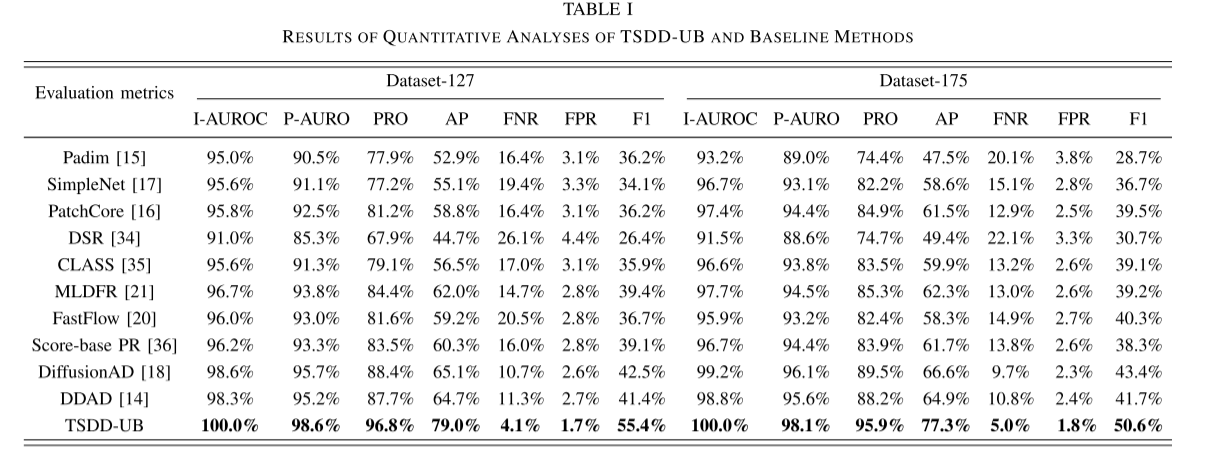
3.4 缺陷检测和定位的定量结果
本实验使用了八种方法来评估TSDD-UB在异常检测和定位方面的性能,其中包括五种基于表示的方法:Patchcore16、SimpleNet17、Padim15、DSR34和CLASS35,以及五种基于重建的方法:MLDFR21、FastFlow20、DiffusionAD18、DDAD14和基于记分的PR36。值得注意的是,DiffusionAD和DDAD提供了更直接的比较,因为它们也是基于去噪扩散模型实现的。该实验在数据集-127和数据集-175上重复十次。表一列出了六项评价指标的平均结果。
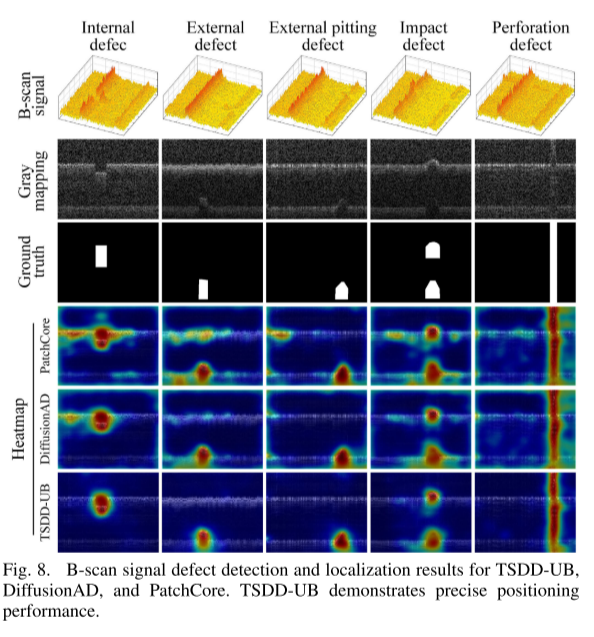
3.5 缺陷检测与定位的定性评价
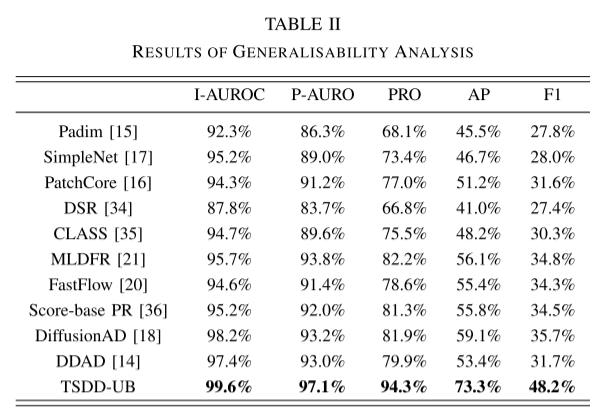
3.6 泛化的性能分析
由于管壁厚度、几何形状和传感器性能的不同,采集的B超信号受到不同分布的限制。为了进一步分析TSDD-UB在上述问题上的性能,我们进行了泛化实验,并使用来自数据集127的正常样本和来自数据集175的缺陷样本作为测试样本进行训练。比较结果列於表二。
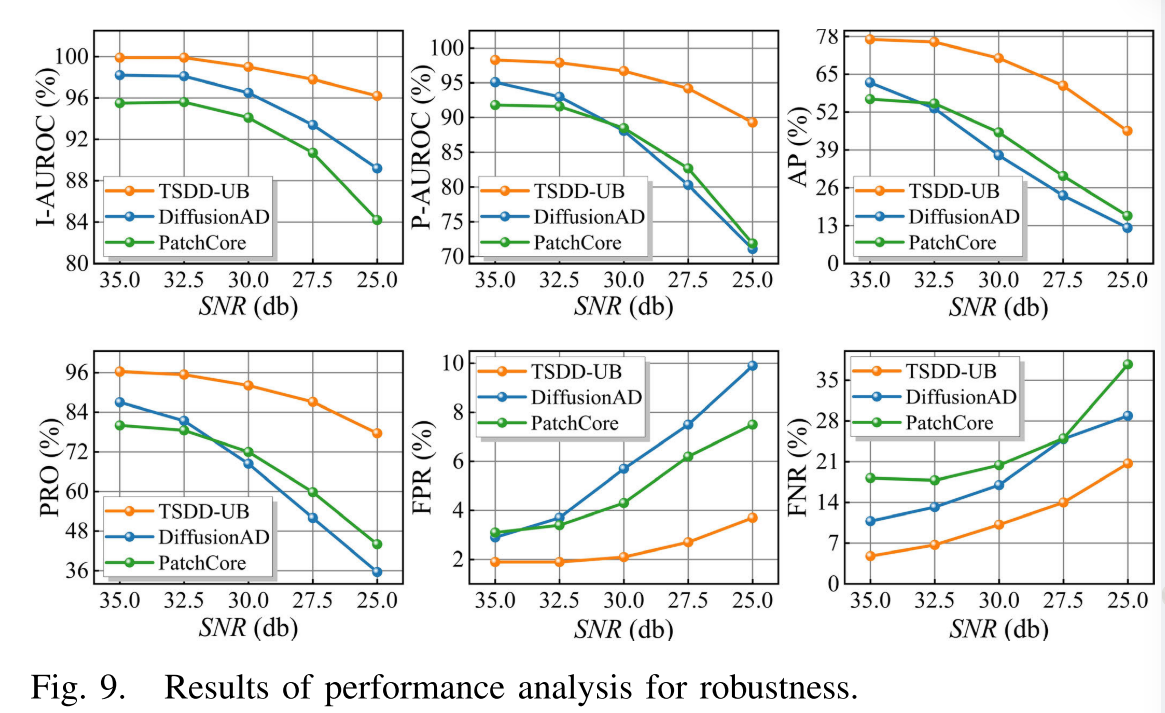
3.7 鲁棒性的性能分析
在实际应用中,由于环境噪声、耦合状态等因素的影响,采集到的B超信号中含有大量的噪声。为了验证TSDD-UB在噪声干扰下的性能,进行了健壮性实验。使用DataSet-127中的原始B扫描信号,通过添加高斯白噪声来合成不同信噪比的信号。信噪比定义如下:

其中B和BN分别表示原始信号和加噪信号。为了验证该方法在不同噪声下的性能,使用了四种不同信噪比水平的信号,包括25、27.5、30、32.5和35dB。实验结果如图9所示。
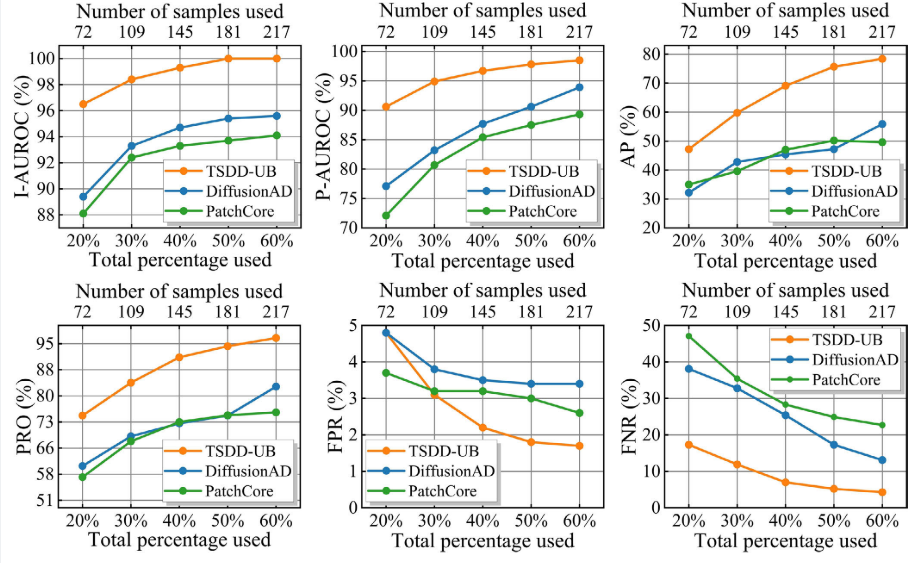
3.8 少样本异常检测的性能分析
由于超声数据固有的大量获取成本和机密性限制,训练数据集的可用性经常受到限制。因此,我们还在有限训练样本的情况下研究了TSDD-UB的性能。我们改变了训练样本的数量,从72个(对应于总训练样本的20%)到217个(60%),并将其与基于表示和基于重建的方法中的代表性方法,即PatchCore16和DiffusionAD18进行了比较。结果汇总在图10中。
3.9 消融
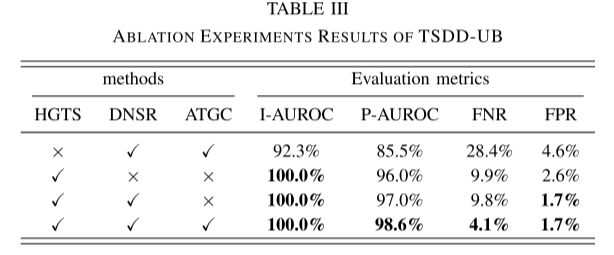
与目前基于重建的方法不同,我们的方法使用了基于超声信号机制知识而专门设计的数据处理技术,从而提高了检测性能。
4 总结
本文提出了一种基于纹理简化的去噪扩散模型,该模型由ATGC、HGTS和DNSR三个部分组成,旨在实现无监督模式下B超信号的准确缺陷检测和定位。区别于传统的无监督异常检测研究,该方法不仅增强了重构网络的能力,而且结合了一套基于超声信号机理知识的定制数据处理技术来提高缺陷检测的精度。该方法为超声无损检测领域中缺陷检测和定位的无监督学习方法提供了一个新的视角。一系列实验结果表明,TSDD-UB能够准确地检测和定位超声B超信号中的缺陷,具有很大的工业应用潜力。
此外,TSDD-UB虽然达到了最先进的缺陷检测和定位精度,但其检测速度受到扩散模型迭代过程的限制。在未来的研究中,我们将继续挖掘TSDD-UB的潜力,目的是在保持高准确率的同时提高检测速度。