
🎬 渡水无言 :个人主页渡水无言
❄专栏传送门 : 《linux专栏》《嵌入式linux驱动开发》《linux系统移植专栏》
❄专栏传送门 : 《freertos专栏》 《STM32 HAL库专栏》《linux裸机开发专栏》
❄专栏传送门 :《产品测评专栏》 《Ai智能体专栏) 《ROS开发专栏》
⭐️流水不争先,争的是滔滔不绝
📚博主简介:第二十届中国研究生电子设计竞赛全国二等奖 |国家奖学金 | 省级三好学生
| 省级优秀毕业生获得者 | csdn新星杯TOP18 | 半导纵横专栏博主 | 211在读研究生
在这里主要分享自己学习的linux嵌入式领域知识;有分享错误或者不足的地方欢迎大佬指导,也欢迎各位大佬互相三连

目录
[1.1、Map Server 地图服务器](#1.1、Map Server 地图服务器)
[1.2、Planner 全局路径规划器](#1.2、Planner 全局路径规划器)
[1.3、Smoother 路径平滑器](#1.3、Smoother 路径平滑器)
[1.4、AMCL 定位器](#1.4、AMCL 定位器)
[1.5、Controller 运动控制器](#1.5、Controller 运动控制器)
[1.6、Recovery 导航恢复行为](#1.6、Recovery 导航恢复行为)
[1.7、Velocity Smoother 速度平滑器](#1.7、Velocity Smoother 速度平滑器)
[1.8、BT Navigator 行为树管理器](#1.8、BT Navigator 行为树管理器)
[1.9、ROS2 NAV2与ROS1 move_base区别](#1.9、ROS2 NAV2与ROS1 move_base区别)
[3.2、创建 NAV2 导航功能包](#3.2、创建 NAV2 导航功能包)
[3.3、编写 NAV2 导航启动 Launch 文件](#3.3、编写 NAV2 导航启动 Launch 文件)
[3.4、CMakeLists.txt 配置说明及完整代码](#3.4、CMakeLists.txt 配置说明及完整代码)
[3.5、package.xml 配置说明及完整代码](#3.5、package.xml 配置说明及完整代码)
[3.7.1、启动 Gazebo 仿真环境](#3.7.1、启动 Gazebo 仿真环境)
[3.7.2、启动 NAV2 导航 + RViz2 可视化](#3.7.2、启动 NAV2 导航 + RViz2 可视化)
[3.7.3、RViz2 手动设置定位与导航目标](#3.7.3、RViz2 手动设置定位与导航目标)
前言
上一期博客我们用 SLAM Toolbox 完成了仿真环境的激光建图,生成了 map.pgm 和 map.yaml 栅格地图文件。
本期博客我们基于这张地图,使用 ROS2 官方导航栈 NAV2 实现机器人自主导航。
NAV2 是 ROS2 时代的标准导航框架,替代了 ROS1 的
move_base,支持路径规划、避障、定点巡航、多目标点导航等功能,是机器人自主导航的核心工具。
一、NAV2(Navigation2)的基本概念
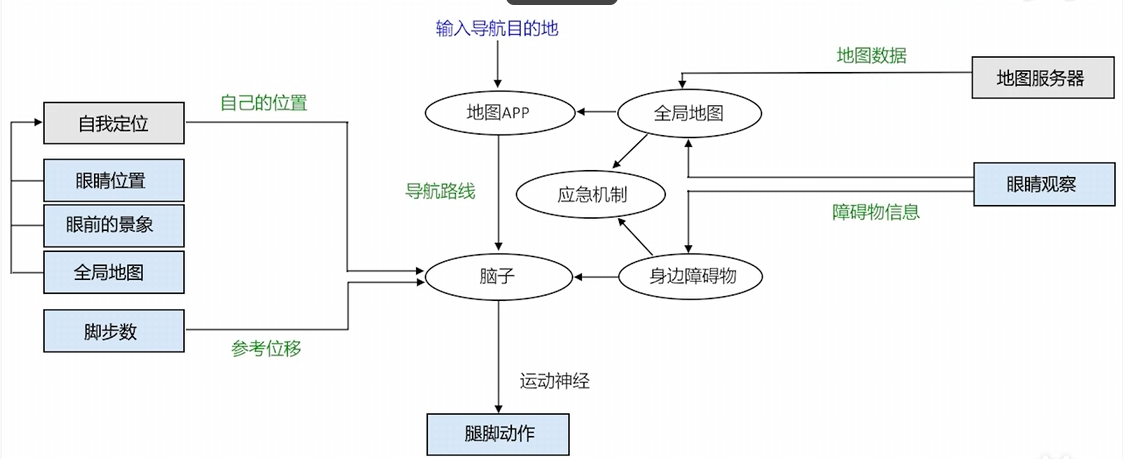
首先我们来看一下现实中人是怎么进行导航的,如下图所示:
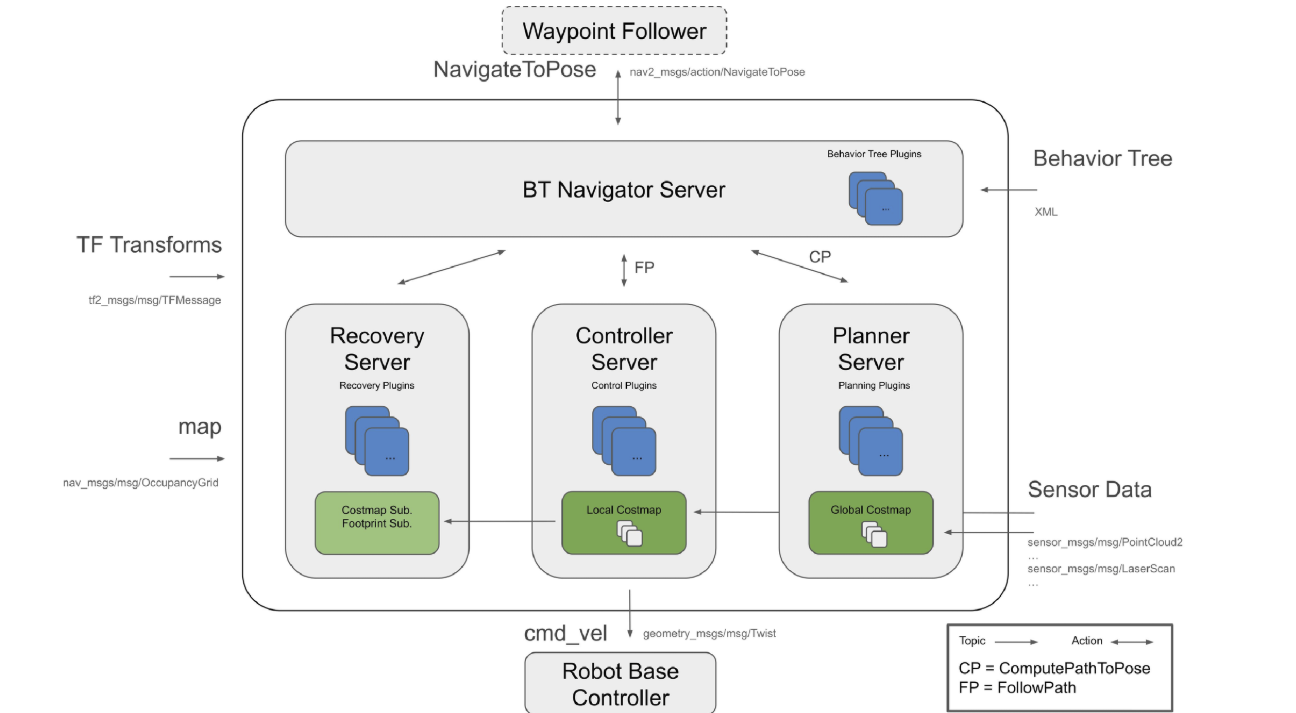
ros2中也有一整套模块化导航系统,官方架构流程图如下图所示:
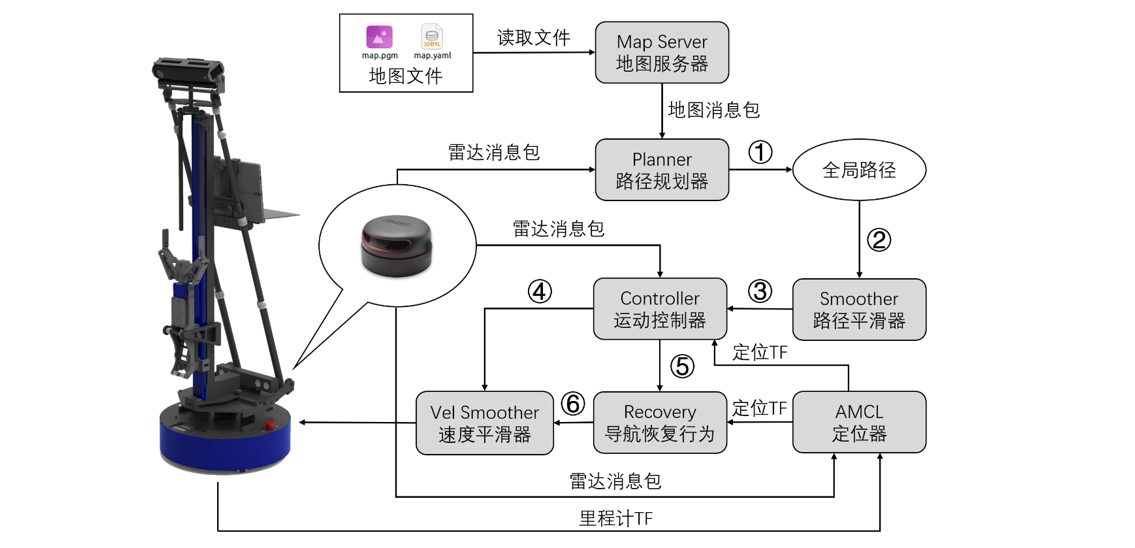
包括多个功能节点,总共有8个核心组件,具体我们可以按如下图所示:
1.1、Map Server 地图服务器
导航需要地图作为路径规划的依据,这个地图数据由Map Server地图服务器提供,发布 /map 地图数据,供其他节点订阅获取。
1.2、Planner 全局路径规划器
此节点主要负责生成全局导航路径。它先从地图服务器的"/map"话题获取全局地图,再从机器人的激光雷达话题获取雷达测距的障碍物点云。将两者叠加后,生成避障用的全局代价地图(在全局路径规划时算一次)。
在全局代价地图里,障碍物的边缘会膨胀出一层半透明的渐变区域。
这个代表的就是机器人可能与障碍物发生碰撞的隐性"代价"。越靠近障碍物,与障碍物碰撞的风险越大,于是颜色越鲜艳,隐性"代价"越大。如下图所示:
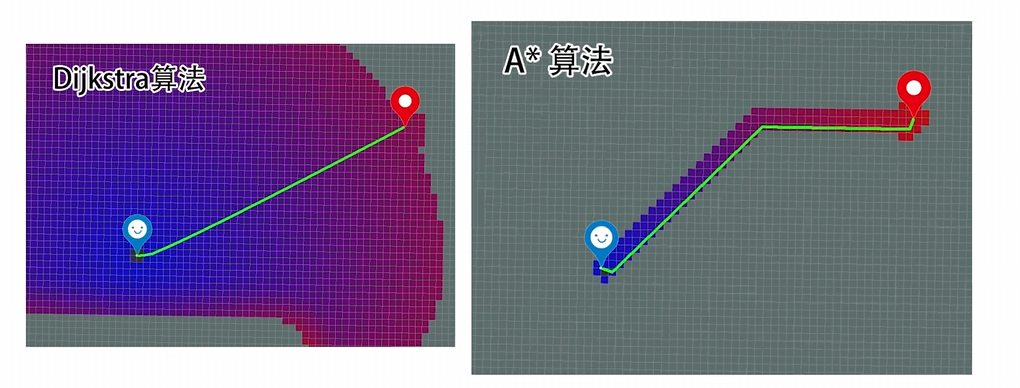
生成了代价地图之后,路径规划器Planner使用A*和Dijkstra's(默认)这类路径规划算法生成一条连接起始点和目标点的路径曲线 ,这就是规划出来的全局导航路径。如下图所示:
1.3、Smoother 路径平滑器
因为Planner 全局路径规划器生成的全局路径可能是会有急转弯、锐角转折等不符合实际的路线,所以需要路径平滑器对路线进行优化
1.4、AMCL 定位器
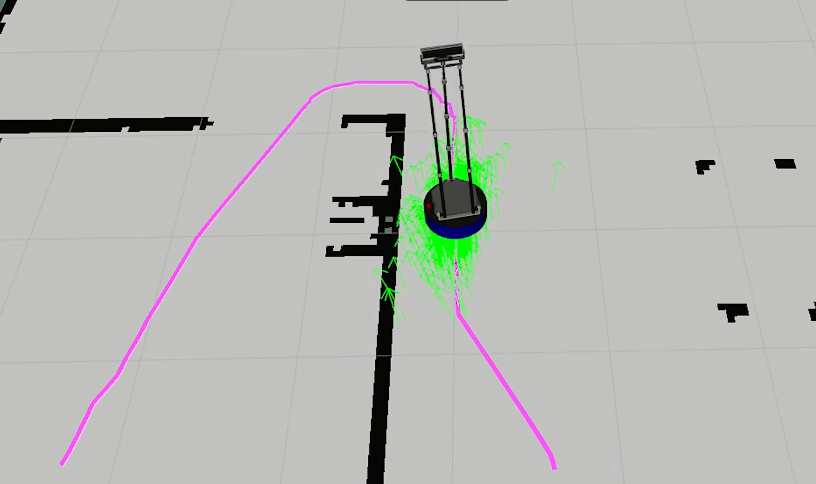
有了导航路径之后,还需要机器人知道自己在地图中的位置。而**AMCL 定位器就是进行机器人的实时自我定位,**这是一种基于概率统计的粒子滤波算法。绿色的这些小箭头就是粒子,如下图所示:
1.5、Controller 运动控制器
运动控制器会从路径平滑器Smoother获取优化后的最终路径曲线,然后根据AMCL定位器给出的机器人定位信息,规划出机器人当前位置的运动策略,尽量贴合这条路径曲线。并按照策略计算出机器人的运动速度,然后通过话题发送速度消息包给速度平滑器。最终由速度平滑器来控制机器人进行运动。
controller_server 同时承担了 "局部规划 + 轨迹跟踪 + 动态避障" 的所有工作。
注意:局部路径规划与动态避障默认采用 DWB 控制器(DWA 算法)
1.6、Recovery 导航恢复行为
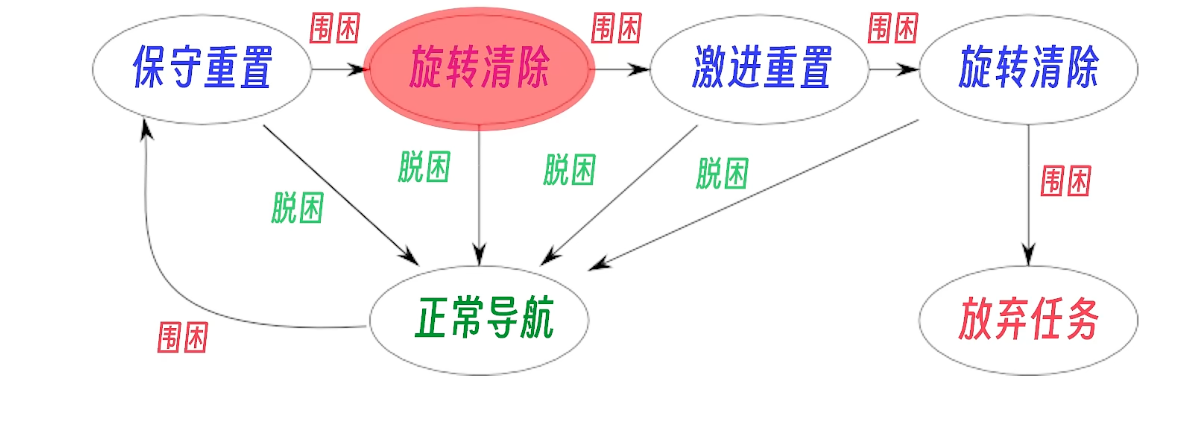
其作用是让机器人从极端情况下脱离险境,自动执行后退、原地转圈、重试等脱困恢复行为。这些行为也是通过话题发送速度消息包给速度平滑器,由速度平滑器来驱动机器人进行移动。如下图所示:
| 图中状态 | NAV2 对应恢复行为 | 作用说明 |
|---|---|---|
| 正常导航 | - | 机器人按规划路径正常行驶,无异常 |
| 保守重置 | BackUp(后退) |
机器人向后退一小段,尝试脱离局部障碍 |
| 旋转清除 | Spin(原地旋转) |
机器人原地 360° 旋转,清除代价地图里的错误障碍标记 |
| 激进重置 | ClearCostmap(清代价地图) |
直接重置全局 / 局部代价地图,重新感知环境 |
| 放弃任务 | 任务失败回调 | 所有恢复行为都失败后,停止导航并报告任务失败 |
1.7、Velocity Smoother 速度平滑器
速度平滑器的作用是将上游运动控制器发送来的速度进行平滑处理,避免出现控制数值的突变,尽量保护硬件设备的安全运行
1.8、BT Navigator 行为树管理器
之前的图中所描述的处理流程是通过一种名为Behavior Tree行为树的形式来组织的,统一调度、编排、管控整个导航全流程,可灵活自定义导航逻辑。
**1.9、**ROS2 NAV2与ROS1 move_base区别
| 对比维度 | ROS1 move_base | ROS2 NAV2 |
|---|---|---|
| 架构设计 | 单节点一体化 | 多节点模块化分布式 |
| 决策方式 | 固定硬编码状态机 | 行为树 BT 可自由配置流程 |
| 通信机制 | ROS1 actionlib 不稳定 | ROS2 DDS + Action 可靠稳定 |
| 可扩展性 | 差,改逻辑需改源码 | 极强,全插件化即插即用 |
| 传感器适配 | 仅 2D 激光为主 | 原生支持 2D/3D 多传感器 |
| 调试难度 | 高,仅靠日志排查 | 低,RViz2 全流程可视化 |
| 维护状态 | 停止维护、已淘汰 | ROS2 官方主推,长期迭代 |
二、NAV2的安装
要在ROS2中使用NAV2,需要先安装相应的软件包,在终端中输入以下指令:
cpp
sudo apt install ros-humble-navigation2ROS2官方建议安装一个NAV2的Bringup软件包,借助这个软件包的Launch文件来启动NAV2。安装指令如下所示:
cpp
sudo apt install ros-humble-nav2-bringup三、使用NAV2实现自主导航
3.1、导入地图文件
上一期博客建图完成后,终端会生成 map.pgm 和 map.yaml 两个文件。为了方便后续管理和加载,我们把它们放到 wpr_simulation2 包的 maps 目录下。如下图所示:

3.2、创建 NAV2 导航功能包
进入工作空间 src 目录,创建导航功能包 nav_pkg:
cpp
cd ~/ros2_zice/src
ros2 pkg create nav_pkg在软件包中创建一个Launch文件,命名为"launch"。在文件夹新建文件,命名:nav.launch.py。
3.3、编写 NAV2 导航启动 Launch 文件
在进行 NAV2 自主导航之前,我们需要编写一个启动文件: nav.launch.py,用来一键加载地图、启动 NAV2 所有导航节点、打开 RViz 可视化界面。
这个 launch 文件的核心作用有 4 个:
指定地图路径:告诉 NAV2 从 wpr_simulation2/maps 加载我们建好的地图。
加载导航参数:读取仿真包自带的导航配置文件,不用自己从零写。
启动官方 NAV2:直接调用 ROS2 自带的 bringup_launch.py,一键启动全套导航。
打开 RViz:自动加载导航专用配置,方便我们设置目标点、观察路径。
完整代码如下所示:
python
import os
from launch import LaunchDescription
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
# 加载存放在wpr_simulation2/maps下的地图配置文件
map_file = os.path.join(
get_package_share_directory('wpr_simulation2'),
'maps',
'map.yaml'
)
# 加载NAV2定位、规划、控制参数文件
nav_param_file = os.path.join(
get_package_share_directory('wpr_simulation2'),
'config',
'nav2_params.yaml'
)
# 获取nav2_bringup官方启动文件目录
nav2_launch_dir = os.path.join(
get_package_share_directory('nav2_bringup'),
'launch'
)
# 调用官方NAV2启动文件,传入地图、仿真时间、参数配置
navigation_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([nav2_launch_dir, '/bringup_launch.py']),
launch_arguments={
'map': map_file,
'use_sim_time': 'True',
'params_file': nav_param_file}.items(),
)
# 加载导航专用RViz配置
rviz_file = os.path.join(
get_package_share_directory('wpr_simulation2'),
'rviz',
'navi.rviz'
)
# 启动RViz2可视化界面
rviz_cmd = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_file]
)
# 整合所有启动节点
ld = LaunchDescription()
ld.add_action(navigation_cmd)
ld.add_action(rviz_cmd)
return ld3.4、CMakeLists.txt 配置说明及完整代码
CMakeLists.txt 是 ROS2 功能包编译配置文件,作用是声明编译版本、加载项目依赖、配置文件安装规则。因为本功能包用到 NAV2、rclcpp 等相关模块,必须逐一声明依赖。全部代码如下所示:
cpp
cmake_minimum_required(VERSION 3.8)
project(nav_pkg)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# 加载所需依赖
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(nav2_bringup REQUIRED)
find_package(navigation2 REQUIRED)
# 安装launch文件夹,让ROS2能识别启动文件
install(
DIRECTORY
launch
DESTINATION share/${PROJECT_NAME}
)
# 测试相关默认配置
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()3.5、package.xml 配置说明及完整代码
package.xml 是 ROS2 功能包依赖声明文件,用来告诉 ROS2 系统当前包依赖哪些官方功能包。凡是 launch 文件中用到的 NAV2、rclcpp 等模块,都必须用 <depend> 标签声明,缺少任意一个都会导致编译报错或节点运行异常。
完整代码如下所示:
cpp
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>nav_pkg</name>
<version>0.0.0</version>
<description>NAV2仿真环境自主导航功能包</description>
<maintainer email="todo@todo.todo">todo</maintainer>
<license>Apache-2.0</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<!-- 项目所需全部依赖 -->
<depend>rclcpp</depend>
<depend>nav2_bringup</depend>
<depend>navigation2</depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>3.6、编译功能包
所有配置文件编写完成后,回到工作空间编译并刷新环境变量,打开终端,输入以下指令:
cpp
cd ~/ros2_zice
colcon build
source install/setup.bash3.7、仿真环境自主导航完整运行流程
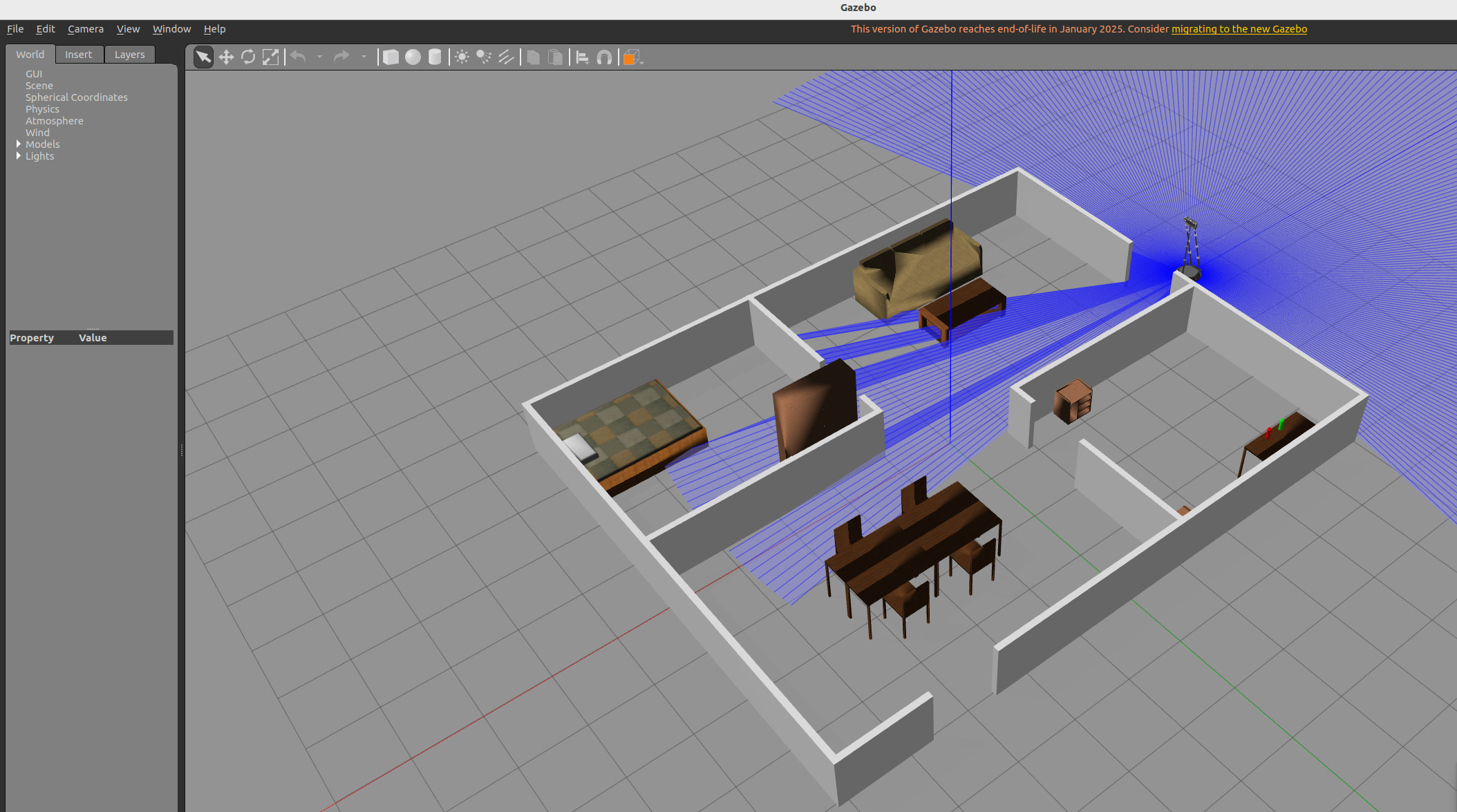
3.7.1、启动 Gazebo 仿真环境
打开终端,输入以下指令:
cpp
source install/setup.bash
ros2 launch wpr_simulation2 robocup_home.launch.py如下图所示:
3.7.2、启动 NAV2 导航 + RViz2 可视化
新建终端,输入以下命令:
作用:自动加载地图、启动全套 NAV2 导航节点、打开 RViz2 可视化界面。
cpp
source install/setup.bash
ros2 launch nav_pkg nav.launch.py如下图所示:
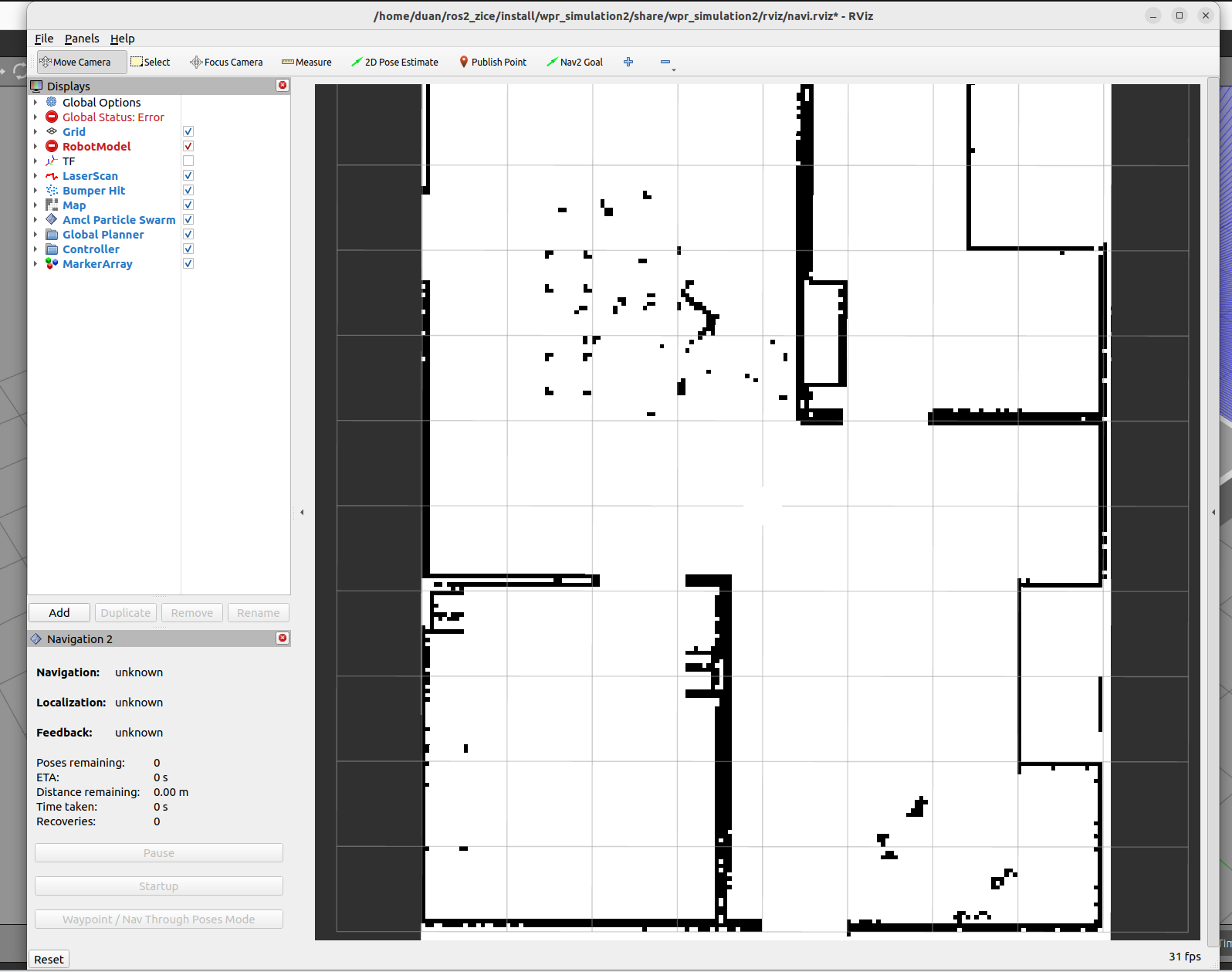
3.7.3、RViz2 手动设置定位与导航目标
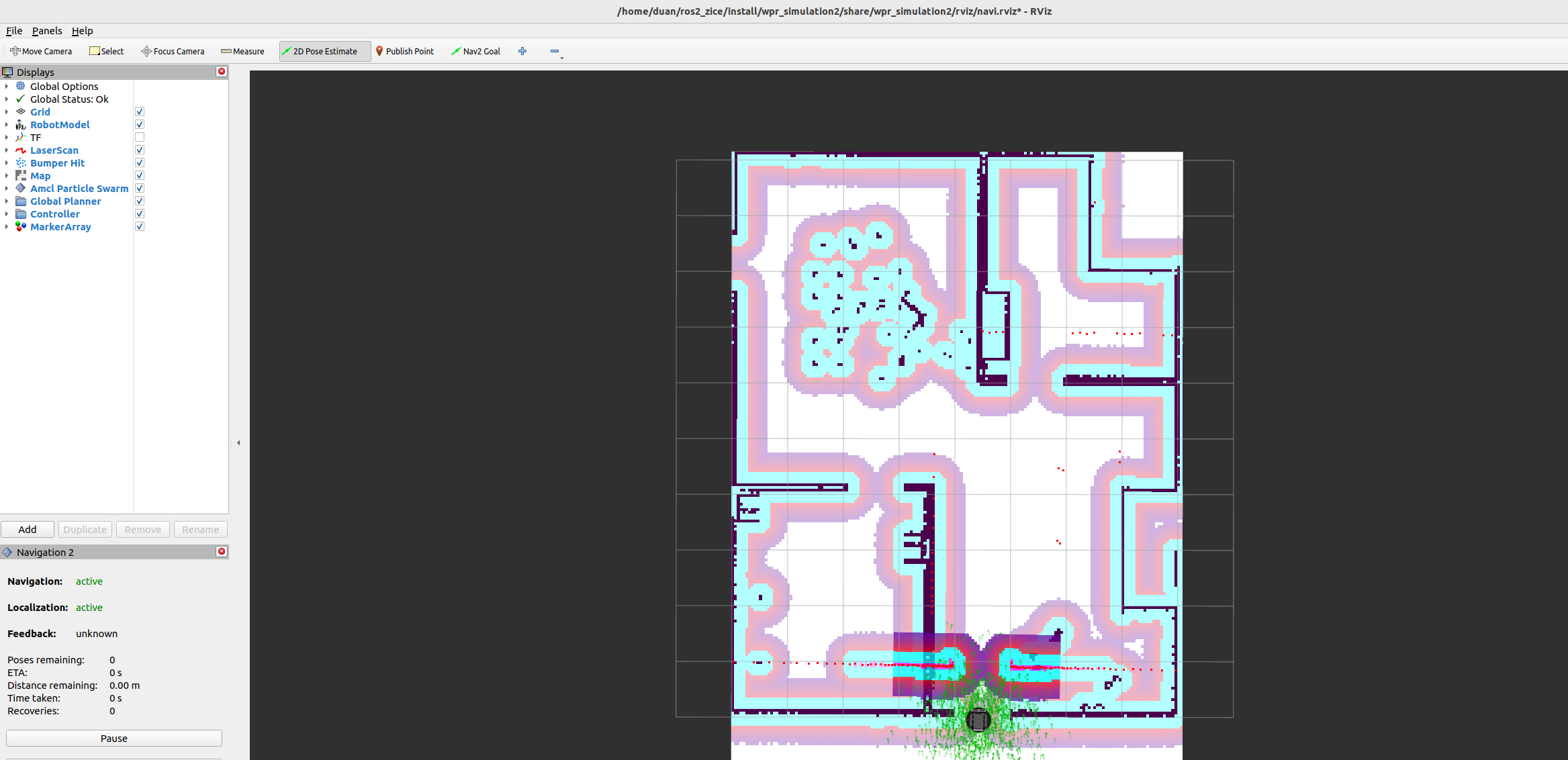
点击 RViz 工具栏 2D Pose Estimate;
在地图上机器人真实位置按住鼠标左键拖动;
箭头指向为机器人初始朝向;
松开鼠标后出现粒子云,代表 AMCL 开始匹配定位。
设置好如下所示:
3.7.4、指定导航目标点
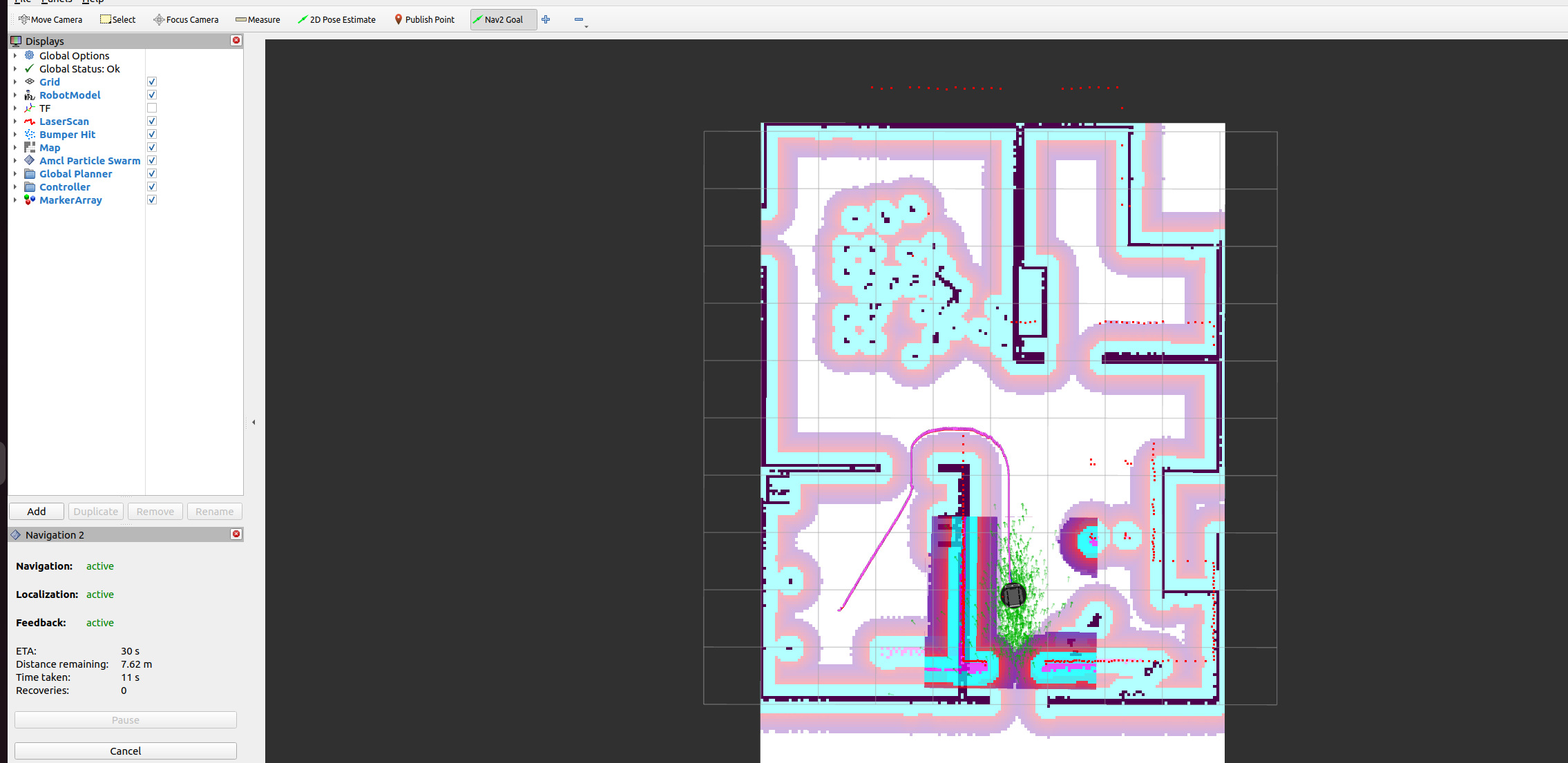
点击 RViz 工具栏 Nav2 Goal。
在地图空旷位置点击并拖动,设置目标位置与朝向。
松开后 NAV2 自动生成紫色全局路径。
机器人自动沿路径避障行驶,到达终点后自动对齐目标朝向。
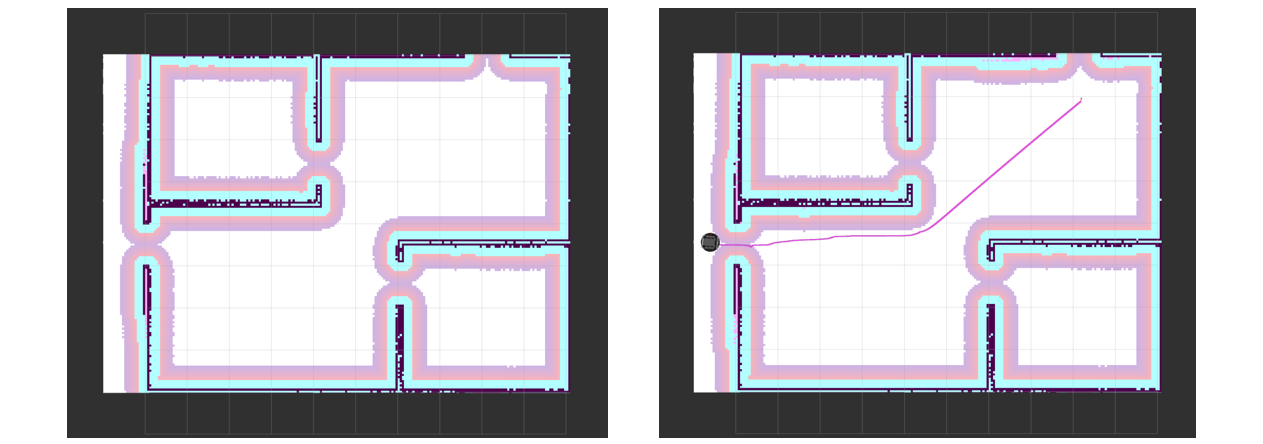
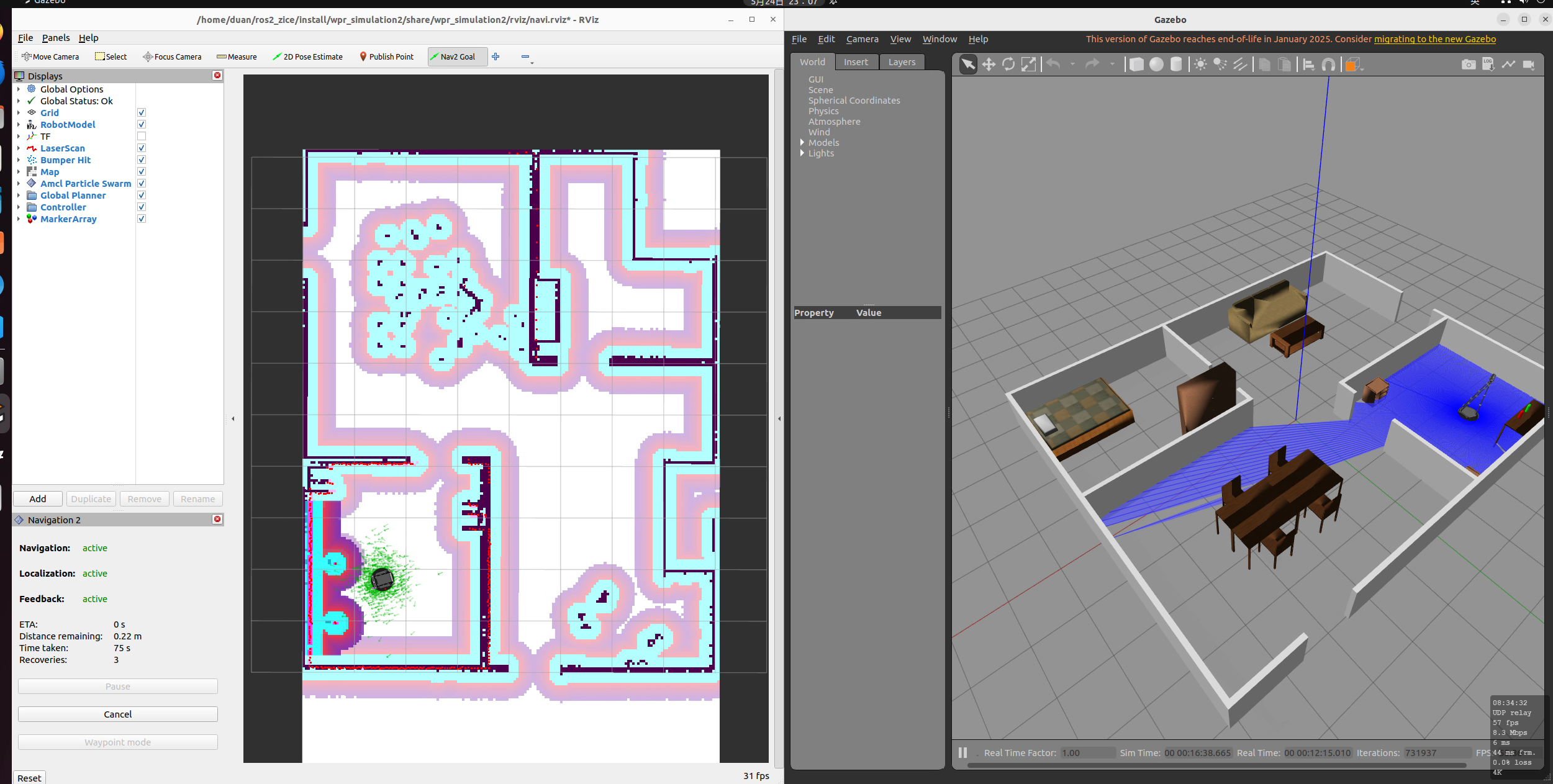
设置好之后,全局规划器会自动规划出一条紫色的路径。这条路径从机器人当前点出发,避开障碍物,一直到导航目标点结束。如下图所示(下图已经是走了一小段时间了):
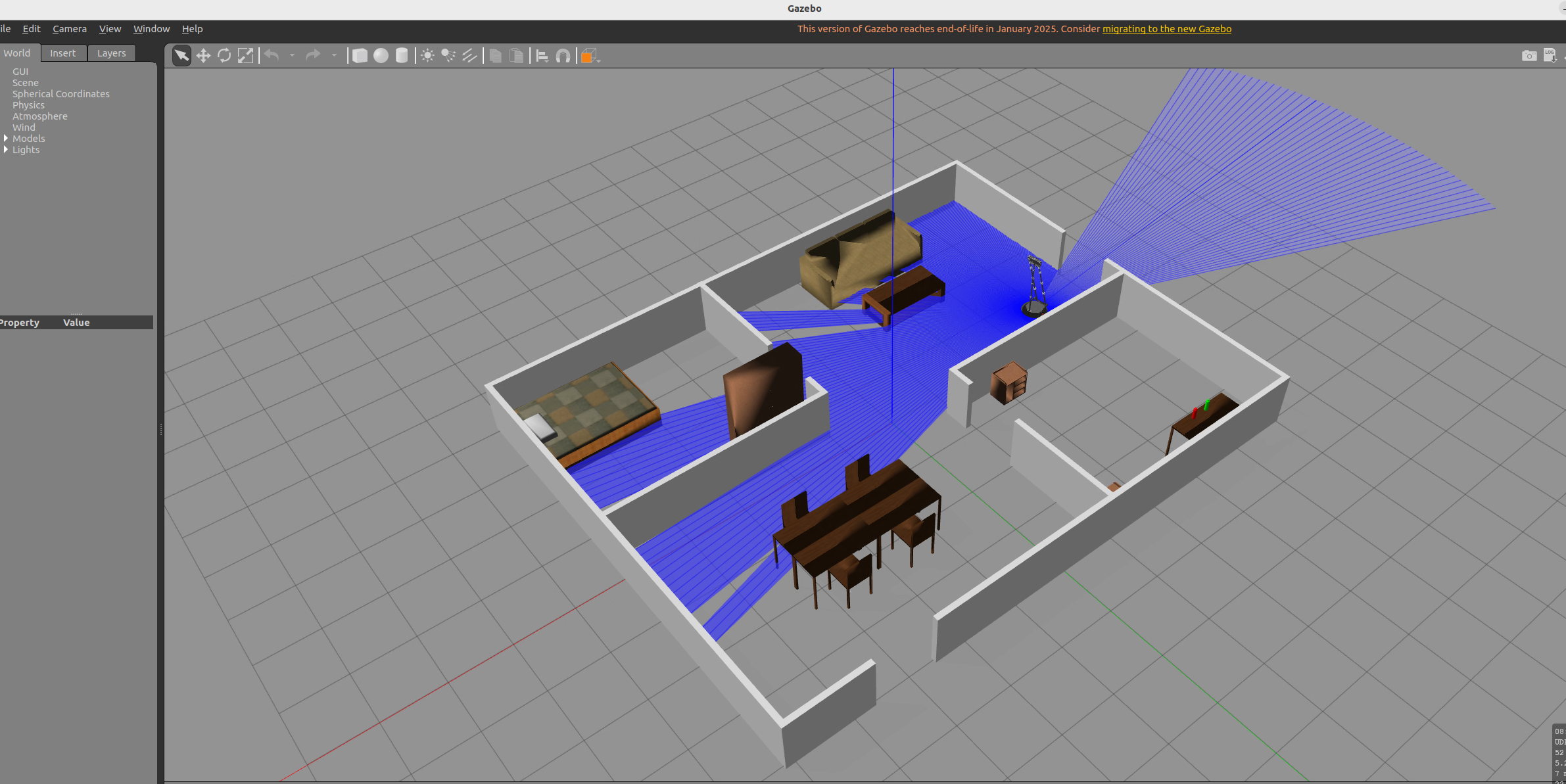
可以看到此时Gazebo仿真界面上,机器人也同步运动了,如下图所示:
机器人到终点后,会原地旋转,调整航向角,最终朝向刚才设置目标点时绿色箭头的方向。如下图所示:
总结
本期博客我们使用 ROS2 官方导航栈 NAV2 实现了机器人自主导航。