一、前言
Linux是一个多任务操作系统,肯定会存在多个任务共同操作同一段内存或者设备的情况,
多个任务甚至中断都能访问的资源叫做共享资源。
二、并发与竞争
并发与竞争:
并发就是多个"用户"同时访问同一个共享资源,竞争就是多个线程争取同一个资源。
现在的 Linux 系统并发产生的原因很复杂,总结一下有下面几个主要原
因:
①、多线程并发访问,Linux 是多任务(线程)的系统,所以多线程访问是最基本的原因。
②、抢占式并发访问,从 2.6 版本内核开始,Linux 内核支持抢占,也就是说调度程序可以
在任意时刻抢占正在运行的线程,从而运行其他的线程。
③、中断程序并发访问,这个无需多说,学过 STM32 的同学应该知道,硬件中断的权利可
是很大的。
④、SMP(多核)核间并发访问,现在 ARM 架构的多核 SOC 很常见,多核 CPU 存在核间并
发访问。
三、原子操作
原子操作介绍以及为什么需要竞争保护
所谓的原子操作就是不可再分割的最小操作步骤。
例如c代码:a = 3;这句汇编之后会变成3步骤:
1 ldr r0**, =0X30000000 /* 变量 a 地址 */
2 ldr r1, =3/* 要写入的值 */
3 str r1, **r0**** /* 将 3 写入到 a 变量中 */
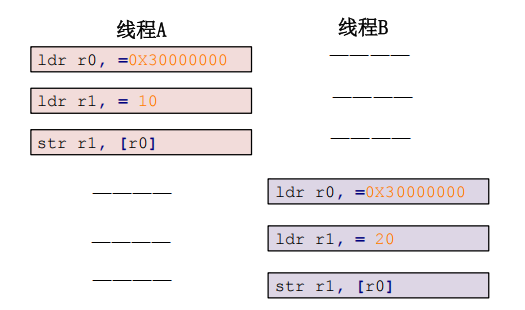
例如线程A执行a = 3;而线程B执行b = 20;理想的执行流程如下,互不干涉:
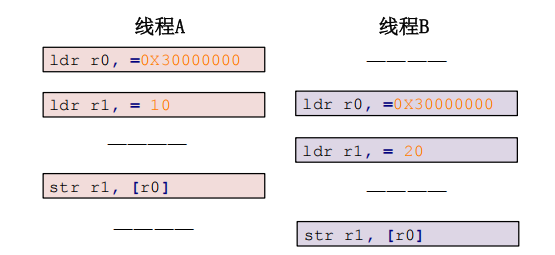
但是上述线程A B代码不加保护的话,实际执行流程可能如下:
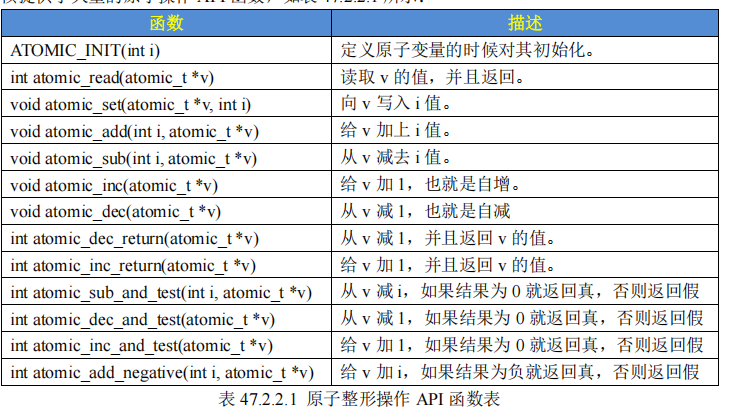
原子整形操作API
Linux 内核定义了叫做 atomic_t 的结构体来完成整形数据的原子操作,在使用中用原子变
量来代替整形变量,此结构体定义在 include/linux/types.h 文件中
cpp
175 typedef struct {
176 int counter;
177 } atomic_t;如果要使用原子操作 API 函数,首先要先定义一个 atomic_t 的变量,如下所示:
atomic_t a; //定义 a
也可以在定义原子变量的时候给原子变量赋初值,如下所示:
atomic_t b = ATOMIC_INIT(0); //定义原子变量 b 并赋初值为 0
如果使用 64 位的 SOC 的话,就要用到 64 位的原子变量:
typedefstruct {
long long counter**;**
}atomic64_t;
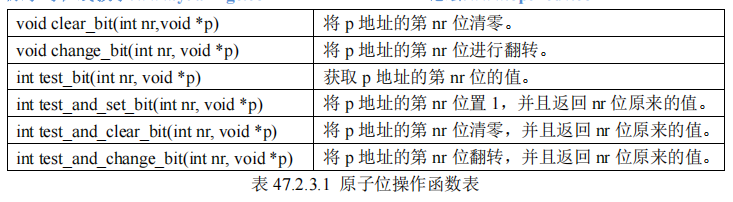
原子位操作API

四、自旋锁
自旋锁介绍
当一个线程要访问某个共享资源的时候首先要先获取相应的锁,锁只能被一个线程持有,
只要此线程不释放持有的锁,那么其他的线程就不能获取此锁。对于自旋锁而言,如果自旋锁
正在被线程 A 持有,线程 B 想要获取自旋锁,那么线程 B 就会处于忙循环-旋转-等待状态,线
程 B 不会进入休眠状态或者说去做其他的处理,而是会一直傻傻的在那里"转圈圈"的等待锁
可用。
自旋锁的"自旋"也就是"原地打转"的意思,"原地打转"的目的是为了等待自旋锁可以
用,可以访问共享资源。把自旋锁比作一个变量 a,变量 a=1 的时候表示共享资源可用,当 a=0
的时候表示共享资源不可用。现在线程 A 要访问共享资源,发现 a=0(自旋锁被其他线程持有),
那么线程 A 就会不断的查询 a 的值,直到 a=1。从这里我们可以看到自旋锁的一个缺点:那就
等待自旋锁的线程会一直处于自旋状态,这样会浪费处理器时间,降低系统性能,所以自旋锁
的持有时间不能太长。所以自旋锁适用于短时期的轻量级加锁,如果遇到需要长时间持有锁的
场景那就需要换其他的方法
Linux 内核使用结构体 spinlock_t 表示自旋锁,结构体定义如下所示:
cpp
64 typedef struct spinlock {
65 union {
66 struct raw_spinlock rlock;
67
68 #ifdef CONFIG_DEBUG_LOCK_ALLOC
69 # define LOCK_PADSIZE (offsetof(struct raw_spinlock, dep_map))
70 struct {
71 u8 __padding[LOCK_PADSIZE];
72 struct lockdep_map dep_map;
73 };
74 #endif
75 };
76 } spinlock_t;在使用自旋锁之前,肯定要先定义一个自旋锁变量,定义方法如下所示:
spinlock_t lock; //定义自旋锁
自旋锁API函数
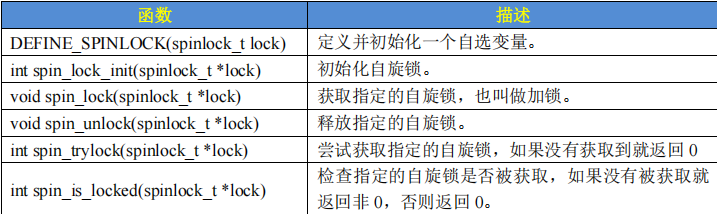
表47.3.2.1中的自旋锁API 函数适用于SMP或支持抢占的单CPU下线程之间的并发访问,
也就是用于线程与线程之间,被自旋锁保护的临界区一定不能调用任何能够引起睡眠和阻塞的
API 函数,否则的话会可能会导致死锁现象的发生。自旋锁会自动禁止抢占,也就说当线程 A
得到锁以后会暂时禁止内核抢占。如果线程 A 在持有锁期间进入了休眠状态,那么线程 A 会自
动放弃 CPU 使用权。线程 B 开始运行,线程 B 也想要获取锁,但是此时锁被 A 线程持有,而
且内核抢占还被禁止了!线程 B 无法被调度出去,那么线程 A 就无法运行,锁也就无法释放,
好了,死锁发生了!
中断插入
如果此时中断也要插一脚,中断也想
访问共享资源,那该怎么办呢?首先可以肯定的是,中断里面可以使用自旋锁,但是在中断里
面使用自旋锁的时候,在获取锁之前一定要先禁止本地中断(也就是本 CPU 中断,对于多核 SOC
来说会有多个 CPU 核),否则可能导致锁死现象的发生,如图 47.3.2.1 所示
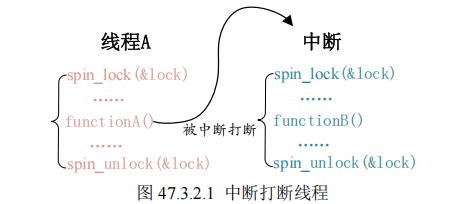
在图 47.3.2.1 中,线程 A 先运行,并且获取到了 lock 这个锁,当线程 A 运行 functionA 函
数的时候中断发生了,中断抢走了 CPU 使用权。右边的中断服务函数也要获取 lock 这个锁,
但是这个锁被线程 A 占有着,中断就会一直自旋,等待锁有效。但是在中断服务函数执行完之
前,线程 A 是不可能执行的,线程 A 说"你先放手",中断说"你先放手",场面就这么僵持着,
死锁发生!
最好的解决方法就是获取锁之前关闭本地中断,Linux 内核提供了相应的 API 函数:
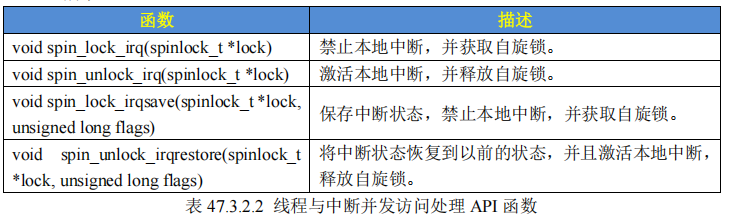
使用 spin_lock_irq/spin_unlock_irq 的时候需要用户能够确定加锁之前的中断状态,但实际
上内核很庞大,运行也是"千变万化",我们是很难确定某个时刻的中断状态,因此不推荐使用
spin_lock_irq/spin_unlock_irq。建议使用 spin_lock_irqsave/spin_unlock_irqrestore,因为这一组函
数会保存中断状态,在释放锁的时候会恢复中断状态。一般在线程中使用 spin_lock_irqsave/
spin_unlock_irqrestore,在中断中使用 spin_lock/spin_unlock,示例代码如下所示:
cpp
1 DEFINE_SPINLOCK(lock) /* 定义并初始化一个锁 */
2
3 /* 线程 A */
4 void functionA (){
5 unsigned long flags; /* 中断状态 */
6 spin_lock_irqsave(&lock, flags) /* 获取锁 */
7 /* 临界区 */
8 spin_unlock_irqrestore(&lock, flags) /* 释放锁 */
9 }
10
11 /* 中断服务函数 */
12 void irq() {
13 spin_lock(&lock) /* 获取锁 */
14 /* 临界区 */
15 spin_unlock(&lock) /* 释放锁 */
16 }中断下半部:
下半部(BH)也会竞争共享资源,有些资料也会将下半部叫做底半部。关于下半部后面的
章节会讲解,如果要在下半部里面使用自旋锁

读写自旋锁
只需要保证在
修改此表的时候没人读取,或者在其他人读取此表的时候没有人修改此表就行了。也就是此表
的读和写不能同时进行,但是可以多人并发的读取此表。像这样,当某个数据结构符合读/写或
生产者/消费者模型的时候就可以使用读写自旋锁。
读写自旋锁为读和写操作提供了不同的锁,一次只能允许一个写操作,也就是只能一个线
程持有写锁,而且不能进行读操作。但是当没有写操作的时候允许一个或多个线程持有读锁,
可以进行并发的读操作。Linux 内核使用 rwlock_t 结构体表示读写锁,结构体定义如下(删除了
条件编译):
cpp
typedef struct {
arch_rwlock_t raw_lock;
} rwlock_t;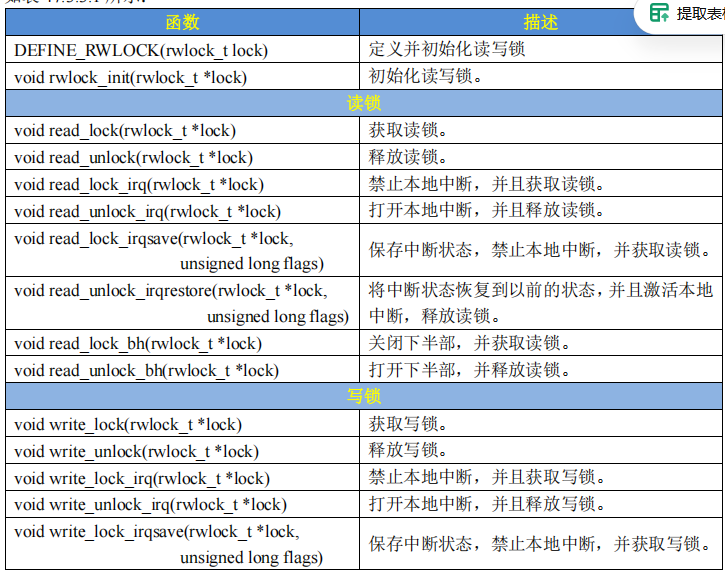

顺序锁
顺序锁在读写锁的基础上衍生而来的,使用读写锁的时候读操作和写操作不能同时进行。
使用顺序锁的话可以允许在写的时候进行读操作,也就是实现同时读写,但是不允许同时进行
并发的写操作。虽然顺序锁的读和写操作可以同时进行,但是如果在读的过程中发生了写操作,
最好重新进行读取,保证数据完整性。顺序锁保护的资源不能是指针,因为如果在写操作的时
候可能会导致指针无效,而这个时候恰巧有读操作访问指针的话就可能导致意外发生,比如
读
取野指针导致系统崩溃。Linux 内核使用 seqlock_t 结构体表示顺序锁,结构体定义如下:
cpp
typedef struct {
struct seqcount seqcount;
spinlock_t lock;
} seqlock_t;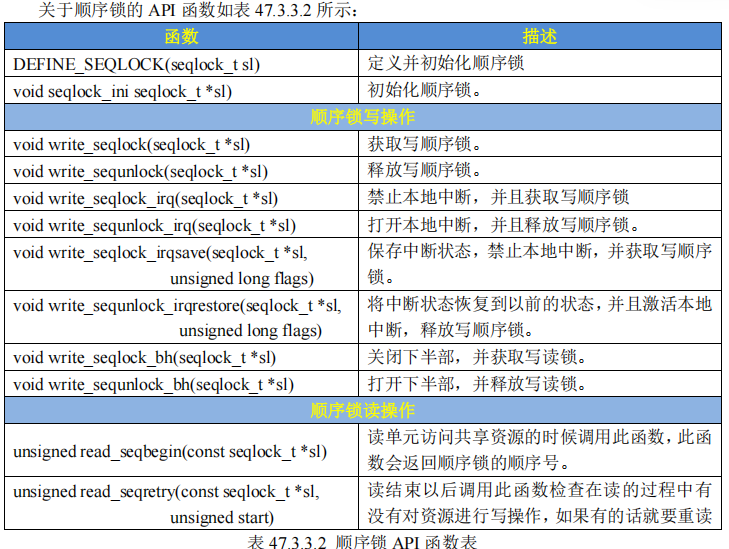
总结
①、因为在等待自旋锁的时候处于"自旋"状态,因此锁的持有时间不能太长,一定要
短,否则的话会降低系统性能。如果临界区比较大,运行时间比较长的话要选择其他的并发处
理方式,比如稍后要讲的信号量和互斥体。
②、自旋锁保护的临界区内不能调用任何可能导致线程休眠的 API 函数,否则的话可能
导致死锁。
③、不能递归申请自旋锁,因为一旦通过递归的方式申请一个你正在持有的锁,那么你就
必须"自旋",等待锁被释放,然而你正处于"自旋"状态,根本没法释放锁。结果就是自己
把自己锁死了!
④、在编写驱动程序的时候我们必须考虑到驱动的可移植性,因此不管你用的是单核的还
是多核的 SOC,都将其当做多核 SOC 来编写驱动程序。
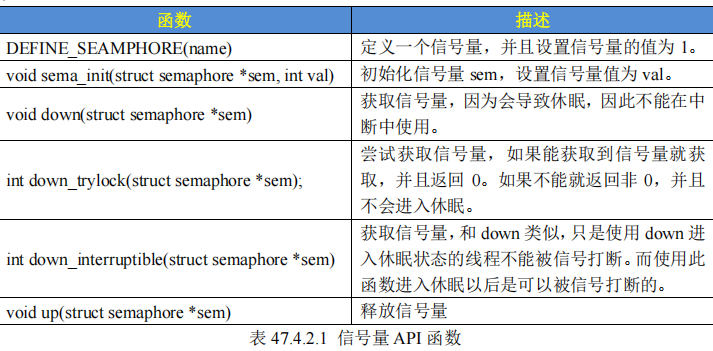
信号量
①、因为信号量可以使等待资源线程进入休眠状态,因此适用于那些占用资源比较久的场
合。
②、因此信号量不能用于中断中,因为信号量会引起休眠,中断不能休眠。
③、如果共享资源的持有时间比较短,那就不适合使用信号量了,因为频繁的休眠、切换
线程引起的开销要远大于信号量带来的那点优势。
struct semaphore {
raw_spinlock_t lock**;**
unsigned int count**;**
struct list_head wait_list**;**
};
信号量的使用:
struct semaphore sem**;** /* 定义信号量 */
sema_init**(&sem,1);
/* 初始化信号量 */
down(&sem);**
/* 申请信号量 */
/* 临界区 */
up**(&sem);**
/* 释放信号量 */
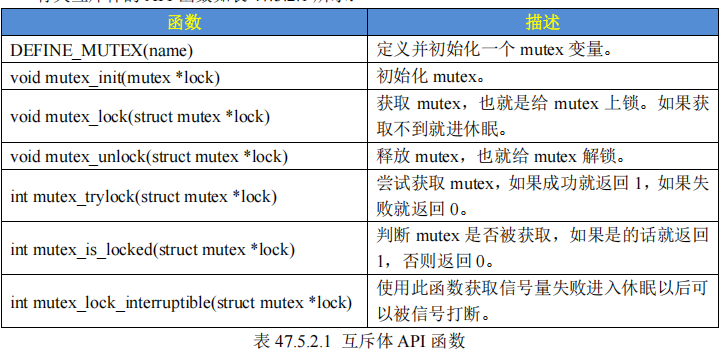
互斥体
虽然可以通过信号量实现互斥,但是 Linux 提供了一个比信号量更专业的机制来进行
互斥,它就是互斥体---mutex。互斥访问表示一次只有一个线程可以访问共享资源,不能递归申
请互斥体。在我们编写 Linux 驱动的时候遇到需要互斥访问的地方建议使用 mutex。Linux 内核
使用 mutex 结构体表示互斥体,定义如下(省略条件编译部分):
struct mutex {
/* 1: unlocked, 0: locked, negative: locked, possible waiters */
atomic_t count**;**
spinlock_t wait_lock**;**
};
在使用 mutex 之前要先定义一个 mutex 变量。在使用 mutex 的时候要注意如下几点:
①、mutex 可以导致休眠,因此不能在中断中使用 mutex,中断中只能使用自旋锁。
②、和信号量一样,mutex 保护的临界区可以调用引起阻塞的 API 函数。
③、因为一次只有一个线程可以持有 mutex,因此,必须由 mutex 的持有者释放 mutex。并
且 mutex 不能递归上锁和解锁。
互斥体变量使用:
cpp
1 struct mutex lock; /* 定义一个互斥体 */
2 mutex_init(&lock); /* 初始化互斥体 */
3
4 mutex_lock(&lock); /* 上锁 */
5 /* 临界区代码 */
6 mutex_unlock(&lock); /* 解锁 */