无人机航拍巡检数据集|城市乡镇港口工业区|高分辨率旋转目标检测|深度学习训练基准
无人机低空智能巡检已成为智慧城市、工业安防、港口物流的核心刚需,但场景单一、标注稀疏、无姿态信息、格式不兼容 长期制约模型泛化与工程落地。本数据集直击行业痛点,覆盖多场景高分辨率真实航拍,带完整姿态标注与双格式标注,可直接用于旋转目标检测、姿态感知、多尺度识别等前沿算法研发,快速构建强鲁棒性低空视觉检测系统。

📝 项目简介
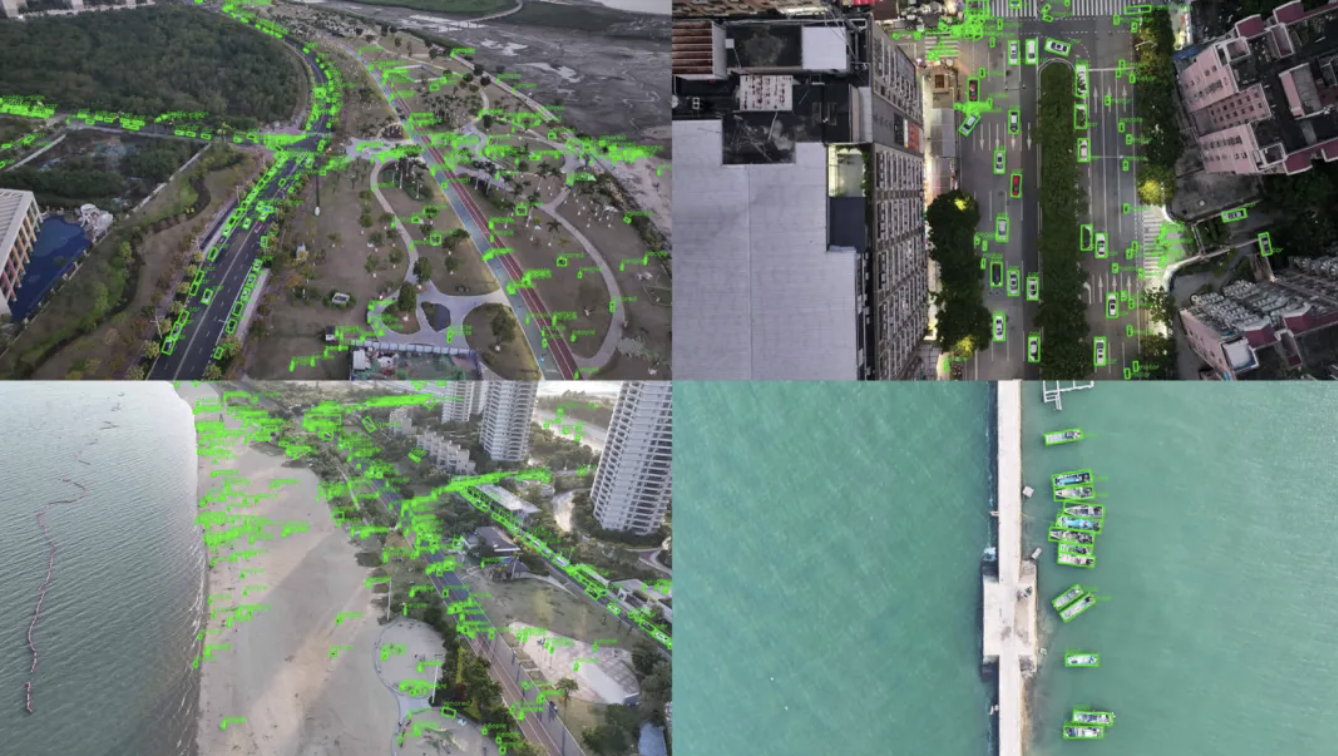
本数据集为无人机定向目标检测 专项数据集,聚焦真实巡检场景,突破传统数据集仅聚焦车辆的局限,覆盖城市、乡镇、港口、工业区等复杂环境,提供3840×2160超高分辨率图像、精细标注与飞行姿态参数,支持旋转目标检测模型训练与无人机姿态感知研究,是低空视觉算法研发与工程落地的优质基准数据。
📊 核心指标
| 指标项 | 详细数值 |
|---|---|
| 图像总数量 | 10000 张 无人机实拍高清图 |
| 标注目标总数 | 596700 个 高精度标注框 |
| 目标类别数 | 12 类 巡检核心目标 |
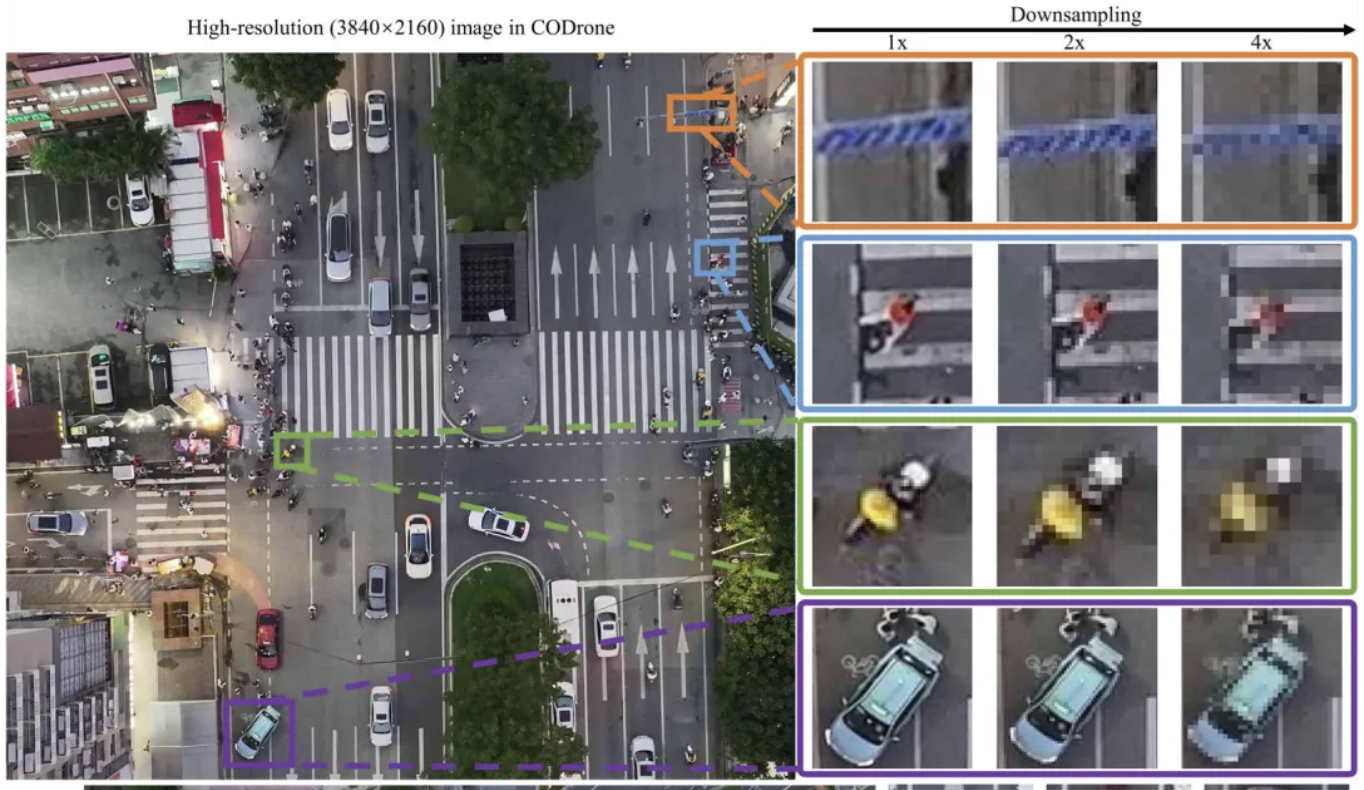
| 图像分辨率 | 3840×2160 4K 级真实场景 |
| 覆盖场景 | 城市、乡镇、港口、工业区 |
| 标注格式 | DOTA 格式 + VOC 格式 双输出 |
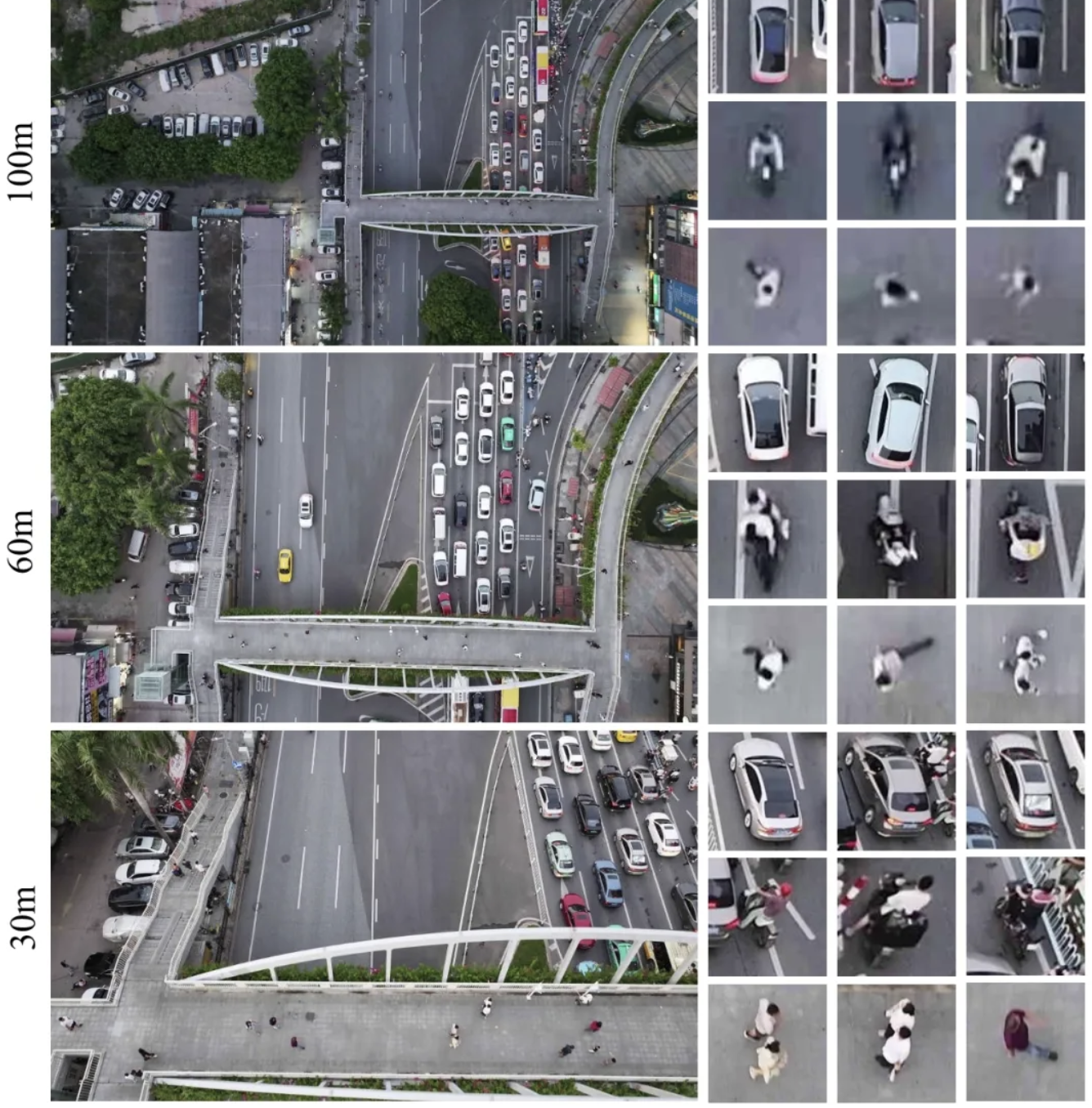
| 附加标注 | 采集高度、相机角度、姿态参数 |
| 核心价值 | 构建无人机定向检测基准、支撑姿态感知研究、推动高分辨率多场景检测技术 |
🎯 数据集亮点
- 场景全覆盖,打破单一域限制
不只聚焦车辆,覆盖城市公共设施、港口装备、工业设备、乡镇建筑等12 类实用目标,模型一次训练适配多域巡检,大幅降低迁移成本。 - 规模与精度双优
10000 张 4K 图 + 59.67 万标注框,兼顾训练充足性与标注质量,有效抑制过拟合,提升小目标/密集目标检测能力。 - 姿态参数增强,赋能姿态感知
每张图像标注飞行高度、相机倾角、拍摄角度,可用于研究飞行状态对检测性能的影响,支撑姿态自适应检测算法研发。 - 双标注格式,开箱即用
同时提供 DOTA(适配旋转检测)与 VOC(适配通用检测),兼容 YOLO-OBB、R3Det、RetinaNet、Faster R-CNN 等主流框架,零格式转换成本。
🧠 深度学习实战代码(带场景注释)
1. 数据集加载与预处理(适配旋转目标检测)
python
# -*- coding: utf-8 -*-
"""
无人机航拍巡检数据集 - DOTA/VOC 格式加载
适配:旋转目标检测(OBB)、高分辨率多尺度训练
场景:城市/港口/工业区 低空巡检
"""
import os
import cv2
import numpy as np
from torch.utils.data import Dataset
class DroneDetDataset(Dataset):
def __init__(self, data_root, mode="train", img_size=(3840,2160), use_obb=True):
self.data_root = data_root
self.mode = mode
self.img_size = img_size
self.use_obb = use_obb
# 标注路径:DOTA(annfile) / VOC(labels)
self.ann_dir = os.path.join(data_root, "annfile" if use_obb else "labels")
self.img_dir = os.path.join(data_root, "images")
self.img_list = [f for f in os.listdir(self.img_dir) if f.endswith((".jpg",".png"))]
def __getitem__(self, idx):
# 1. 读取图像与姿态元信息(高度/角度)
img_name = self.img_list[idx]
img_path = os.path.join(self.img_dir, img_name)
img = cv2.imread(img_path)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 2. 读取旋转框/水平框标注
ann_path = os.path.join(self.ann_dir, os.path.splitext(img_name)[0] + ".txt")
targets = self._load_annotations(ann_path)
return img, targets
def _load_annotations(self, ann_path):
"""解析 DOTA 格式 OBB 标注:x1 y1 x2 y2 x3 y3 x4 y4 class"""
targets = []
if not os.path.exists(ann_path): return np.array(targets)
with open(ann_path,"r",encoding="utf-8") as f:
for line in f.readlines():
line = line.strip().split()
coords = list(map(float, line[:8]))
cls_id = int(line[8])
targets.append(coords + [cls_id])
return np.array(targets, dtype=np.float32)2. YOLOv8-OBB 旋转检测训练配置
yaml
# drone_uav_config.yaml
# 无人机航拍巡检数据集 - 旋转目标检测训练配置
path: ./drone_dataset # 数据集根目录
train: images/train # 训练集
val: images/val # 验证集
test: images/test # 测试集
# 类别数(本数据集12类)
nc: 12
# 类别名称(按实际标注填写)
names:
0: vehicle
1: ship
2: container
3: building
4: tower
5: bridge
6: crane
7: equipment
8: tree
9: road
10: person
11: fence
# 旋转框任务
obb: true3. 模型训练启动代码
python
"""
YOLOv8-OBB 训练无人机航拍旋转目标检测
场景:港口/工业区/城市 多姿态高分辨率目标
功能:支持高度/角度信息融合训练
"""
from ultralytics import YOLO
if __name__ == "__main__":
# 加载旋转框预训练模型
model = YOLO("yolov8m-obb.pt")
# 开始训练
model.train(
data="drone_uav_config.yaml",
imgsz=1280, # 输入尺寸(适配高分辨率下采样)
epochs=100,
batch=8,
device=0,
workers=4,
cache=True,
amp=True,
patience=10,
# 航拍增强
hsv_h=0.1,
hsv_s=0.5,
hsv_v=0.3,
degrees=30, # 角度增强(贴合无人机姿态变化)
perspective=0.1, # 透视增强
)📌 适用方向
- 旋转目标检测(OBB)算法研发与验证
- 无人机姿态感知、视角自适应检测
- 智慧城市、港口自动化、工业巡检、安防监控
- 高分辨率小目标检测、密集目标检测
- 低空视觉数据集基准、学术评测与竞赛数据
📎 项目标签
#无人机数据集 #航拍巡检 #旋转目标检测 #DOTA数据集 #VOC格式 #高分辨率航拍 #智慧城市 #工业视觉 #港口检测 #深度学习数据集 #目标检测 #低空AI