如有代码定制、讲解的需求,可联系我↑
更多文章:
https://blog.csdn.net/callmeup/article/details/152721453?spm=1011.2415.3001.5331
在目标跟踪、雷达定位、组合导航和传感器融合等问题中,卡尔曼滤波是一类非常常用的状态估计方法。对于线性系统,经典 Kalman Filter 已经可以取得不错的效果;但在很多实际场景中,系统往往并不是线性的,比如雷达测距测角、无人机定位、车辆运动跟踪等,这时候就需要使用 EKF、UKF、CKF 等非线性滤波方法。
这篇文章分享的是一个基于 MATLAB 的自适应容积卡尔曼滤波例程,主要实现二维雷达目标跟踪任务。代码中同时给出了经典 CKF 和基于新息协方差匹配的自适应 CKF,也就是 CM-ACKF,并通过仿真结果对比两种方法在目标轨迹估计、位置误差、速度误差和噪声参数调整方面的表现。
本例程的一个重点是:即使初始过程噪声协方差 Q 和观测噪声协方差 R 设置得不够准确,CM-ACKF 也可以利用新息信息进行在线调整,从而让滤波器逐渐适应真实噪声环境。
程序实现的主要功能
本文代码主要完成以下内容:
- 构建二维平面目标运动模型;
- 构建雷达测距、测角非线性观测模型;
- 实现经典 CKF 容积卡尔曼滤波;
- 实现基于新息协方差匹配的自适应 CKF;
- 对过程噪声 Q 和观测噪声 R 进行在线调节;
- 对比真实轨迹、雷达观测、CKF 估计和 CM-ACKF 估计;
- 输出位置误差、速度误差、RMSE 和性能提升统计结果;
- 绘制 Q、R 自适应变化曲线,观察滤波器的自我修正过程。
运行代码后,可以直观看到 CM-ACKF 相比经典 CKF 在噪声参数不准确时的优势。经典 CKF 使用固定 Q 和 R,一旦噪声设置偏差较大,滤波精度就会受到影响;而 CM-ACKF 可以根据新息统计结果逐步修正 Q 和 R,使滤波器更加贴合真实系统。
状态模型设计
仿真对象是二维平面内运动的目标,状态向量设置为:
x ∗ k = x k v ∗ x , k y k v y , k \mathbf{x}*k = \begin{bmatrix} x_k \ v*{x,k} \ y_k \ v_{y,k} \end{bmatrix} x∗k=xk v∗x,k yk vy,k
其中:
- x k x_k xk 表示目标在 X 方向的位置;
- v x , k v_{x,k} vx,k 表示目标在 X 方向的速度;
- y k y_k yk 表示目标在 Y 方向的位置;
- v y , k v_{y,k} vy,k 表示目标在 Y 方向的速度。
本文采用匀速运动模型,状态转移方程为:
x ∗ k = F x ∗ k − 1 + G w k − 1 \mathbf{x}*k = \mathbf{F}\mathbf{x}*{k-1} + \mathbf{G}\mathbf{w}_{k-1} x∗k=Fx∗k−1+Gwk−1
其中,状态转移矩阵为:
F = 1 Δ t 0 0 0 1 0 0 0 0 1 Δ t 0 0 0 1 \mathbf{F} = \begin{bmatrix} 1 & \Delta t & 0 & 0 \ 0 & 1 & 0 & 0 \ 0 & 0 & 1 & \Delta t \ 0 & 0 & 0 & 1 \end{bmatrix} F=1Δt00 0100 001Δt 0001
过程噪声输入矩阵为:
G = Δ t 2 2 0 Δ t 0 0 Δ t 2 2 0 Δ t \mathbf{G} = \begin{bmatrix} \frac{\Delta t^2}{2} & 0 \ \Delta t & 0 \ 0 & \frac{\Delta t^2}{2} \ 0 & \Delta t \end{bmatrix} G=2Δt20 Δt0 02Δt2 0Δt
过程噪声满足:
w k − 1 ∼ N ( 0 , q 2 I ) \mathbf{w}_{k-1} \sim \mathcal{N}(0, q^2\mathbf{I}) wk−1∼N(0,q2I)
因此,真实过程噪声协方差可以写成:
Q t r u e = q 2 G G T \mathbf{Q}_{true} = q^2 \mathbf{G}\mathbf{G}^T Qtrue=q2GGT
这个模型的物理意义比较直观:目标在 X 和 Y 两个方向上做近似匀速运动,但受到随机加速度噪声影响,因此实际轨迹并不是完全理想的直线。
雷达非线性观测模型
本例程中,雷达可以测得目标相对于雷达位置的距离和方位角。假设雷达位置为:
p r = x r y r \mathbf{p}_r = \begin{bmatrix} x_r \ y_r \end{bmatrix} pr=xr yr
目标位置为:
p k = x k y k \mathbf{p}_k = \begin{bmatrix} x_k \ y_k \end{bmatrix} pk=xk yk
则雷达距离观测为:
r k = ( x k − x r ) 2 + ( y k − y r ) 2 r_k = \sqrt{(x_k - x_r)^2 + (y_k - y_r)^2} rk=(xk−xr)2+(yk−yr)2
雷达方位角观测为:
θ k = arctan 2 ( y k − y r , x k − x r ) \theta_k = \arctan2(y_k - y_r, x_k - x_r) θk=arctan2(yk−yr,xk−xr)
因此,系统观测方程可以写成:
z k = h ( x k ) + v k \mathbf{z}_k = h(\mathbf{x}_k) + \mathbf{v}_k zk=h(xk)+vk
其中:
h ( x k ) = ( x k − x r ) 2 + ( y k − y r ) 2 arctan 2 ( y k − y r , x k − x r ) h(\mathbf{x}_k) = \begin{bmatrix} \sqrt{(x_k - x_r)^2 + (y_k - y_r)^2} \ \arctan2(y_k - y_r, x_k - x_r) \end{bmatrix} h(xk)=(xk−xr)2+(yk−yr)2 arctan2(yk−yr,xk−xr)
观测噪声满足:
v k ∼ N ( 0 , R ) \mathbf{v}_k \sim \mathcal{N}(0,\mathbf{R}) vk∼N(0,R)
观测噪声协方差矩阵为:
R = σ r 2 0 0 σ θ 2 \mathbf{R} = \begin{bmatrix} \sigma_r^2 & 0 \ 0 & \sigma_{\theta}^2 \end{bmatrix} R=σr20 0σθ2
这里的观测模型是非线性的,因为它包含平方根函数和反正切函数。如果直接使用普通 Kalman Filter,就无法处理这种非线性观测关系。因此,本文采用 CKF 容积卡尔曼滤波进行状态估计。
CKF 容积卡尔曼滤波基本思想
CKF 的核心思想是:不用直接对非线性函数做线性化,而是在状态空间中选取一组容积点,将这些点通过非线性函数传播,然后利用传播后的点来近似计算均值和协方差。
对于 n 维状态变量,CKF 会选取 2 n 2n 2n 个容积点。本文状态维度为:
n = 4 n = 4 n=4
所以容积点个数为:
m = 2 n = 8 m = 2n = 8 m=2n=8
单位容积点可以表示为:
ξ i = { n e ∗ i , i = 1 , 2 , ⋯ , n − n e ∗ i − n , i = n + 1 , n + 2 , ⋯ , 2 n \boldsymbol{\xi}_i = \begin{cases} \sqrt{n}\mathbf{e}*i, & i=1,2,\cdots,n \ -\sqrt{n}\mathbf{e}*{i-n}, & i=n+1,n+2,\cdots,2n \end{cases} ξi={n e∗i,i=1,2,⋯,n −n e∗i−n,i=n+1,n+2,⋯,2n
其中, e i \mathbf{e}_i ei 表示单位向量。
实际容积点由状态均值和协方差生成:
X i , k = x ^ k + S k ξ i \mathbf{X}_{i,k} = \hat{\mathbf{x}}_k + \mathbf{S}_k\boldsymbol{\xi}_i Xi,k=x^k+Skξi
其中 S k \mathbf{S}_k Sk 是协方差矩阵 P k \mathbf{P}_k Pk 的 Cholesky 分解结果:
P k = S k S k T \mathbf{P}_k = \mathbf{S}_k\mathbf{S}_k^T Pk=SkSkT
这些容积点可以理解为围绕当前估计状态分布的一组采样点。协方差越大,容积点分布得越分散;协方差越小,容积点越集中。
CKF 预测过程
在预测阶段,先利用状态转移方程传播状态:
x ^ ∗ k ∣ k − 1 = F x ^ ∗ k − 1 ∣ k − 1 \hat{\mathbf{x}}*{k|k-1} = \mathbf{F}\hat{\mathbf{x}}*{k-1|k-1} x^∗k∣k−1=Fx^∗k−1∣k−1
协方差预测为:
P ∗ k ∣ k − 1 = F P ∗ k − 1 ∣ k − 1 F T + Q \mathbf{P}*{k|k-1} = \mathbf{F}\mathbf{P}*{k-1|k-1}\mathbf{F}^T + \mathbf{Q} P∗k∣k−1=FP∗k−1∣k−1FT+Q
然后基于预测状态和预测协方差生成容积点:
X ∗ i , k ∣ k − 1 = x ^ ∗ k ∣ k − 1 + S k ∣ k − 1 ξ i \mathbf{X}*{i,k|k-1} = \hat{\mathbf{x}}*{k|k-1} + \mathbf{S}_{k|k-1}\boldsymbol{\xi}_i X∗i,k∣k−1=x^∗k∣k−1+Sk∣k−1ξi
其中:
P ∗ k ∣ k − 1 = S ∗ k ∣ k − 1 S k ∣ k − 1 T \mathbf{P}*{k|k-1} = \mathbf{S}*{k|k-1}\mathbf{S}_{k|k-1}^T P∗k∣k−1=S∗k∣k−1Sk∣k−1T
在这个过程中,Q 的大小会直接影响预测协方差。如果 Q 设置太小,滤波器会过度相信运动模型;如果 Q 设置太大,滤波器又会认为目标运动非常不稳定,导致估计结果抖动。因此,Q 的合理设置对滤波效果非常关键。
CKF 更新过程
在更新阶段,需要将预测容积点代入雷达观测方程:
Z ∗ i , k ∣ k − 1 = h ( X ∗ i , k ∣ k − 1 ) \mathbf{Z}*{i,k|k-1} = h(\mathbf{X}*{i,k|k-1}) Z∗i,k∣k−1=h(X∗i,k∣k−1)
预测观测均值为:
z ^ ∗ k ∣ k − 1 = 1 m ∑ ∗ i = 1 m Z i , k ∣ k − 1 \hat{\mathbf{z}}*{k|k-1} = \frac{1}{m}\sum*{i=1}^{m}\mathbf{Z}_{i,k|k-1} z^∗k∣k−1=m1∑∗i=1mZi,k∣k−1
预测观测协方差为:
P ∗ z z , k = 1 m ∑ ∗ i = 1 m ( Z ∗ i , k ∣ k − 1 − z ^ ∗ k ∣ k − 1 ) ( Z ∗ i , k ∣ k − 1 − z ^ ∗ k ∣ k − 1 ) T ∗ R \mathbf{P}*{zz,k} = \frac{1}{m}\sum*{i=1}^{m} (\mathbf{Z}*{i,k|k-1}-\hat{\mathbf{z}}*{k|k-1}) (\mathbf{Z}*{i,k|k-1}-\hat{\mathbf{z}}*{k|k-1})^T* \mathbf{R} P∗zz,k=m1∑∗i=1m(Z∗i,k∣k−1−z^∗k∣k−1)(Z∗i,k∣k−1−z^∗k∣k−1)T∗R
状态与观测之间的互协方差为:
P ∗ x z , k = 1 m ∑ ∗ i = 1 m ( X ∗ i , k ∣ k − 1 − x ^ ∗ k ∣ k − 1 ) ( Z ∗ i , k ∣ k − 1 − z ^ ∗ k ∣ k − 1 ) T \mathbf{P}*{xz,k} = \frac{1}{m}\sum*{i=1}^{m} (\mathbf{X}*{i,k|k-1}-\hat{\mathbf{x}}*{k|k-1}) (\mathbf{Z}*{i,k|k-1}-\hat{\mathbf{z}}*{k|k-1})^T P∗xz,k=m1∑∗i=1m(X∗i,k∣k−1−x^∗k∣k−1)(Z∗i,k∣k−1−z^∗k∣k−1)T
然后计算卡尔曼增益:
K ∗ k = P ∗ x z , k P z z , k − 1 \mathbf{K}*k = \mathbf{P}*{xz,k}\mathbf{P}_{zz,k}^{-1} K∗k=P∗xz,kPzz,k−1
新息为:
ν k = z ∗ k − z ^ ∗ k ∣ k − 1 \boldsymbol{\nu}_k = \mathbf{z}*k - \hat{\mathbf{z}}*{k|k-1} νk=z∗k−z^∗k∣k−1
状态更新为:
x ^ ∗ k ∣ k = x ^ ∗ k ∣ k − 1 + K k ν k \hat{\mathbf{x}}*{k|k} = \hat{\mathbf{x}}*{k|k-1} + \mathbf{K}_k\boldsymbol{\nu}_k x^∗k∣k=x^∗k∣k−1+Kkνk
协方差更新为:
P ∗ k ∣ k = P ∗ k ∣ k − 1 − K ∗ k P ∗ z z , k K k T \mathbf{P}*{k|k} = \mathbf{P}*{k|k-1} - \mathbf{K}*k\mathbf{P}*{zz,k}\mathbf{K}_k^T P∗k∣k=P∗k∣k−1−K∗kP∗zz,kKkT
这里需要注意,由于观测中包含角度 θ \theta θ,所以在计算角度残差时需要进行归一化处理:
Δ θ = atan2 ( sin ( Δ θ ) , cos ( Δ θ ) ) \Delta \theta = \operatorname{atan2}(\sin(\Delta \theta), \cos(\Delta \theta)) Δθ=atan2(sin(Δθ),cos(Δθ))
这样可以把角度误差限制在 − π , π -\\pi,\\pi −π,π 范围内,避免出现例如 179° 和 -179° 被误判为相差 358° 的问题。
7. 为什么需要自适应 Q 和 R?
经典 CKF 的问题在于:Q 和 R 一旦给定,在整个滤波过程中就保持不变。
但在实际应用中,Q 和 R 往往很难准确设置。
例如:
- 雷达测距误差可能会随着距离变化;
- 测角精度可能会受到目标方位、遮挡或噪声干扰影响;
- 目标运动状态可能不是严格匀速;
- 初始噪声参数可能只是经验值;
- 实际环境可能比仿真模型更加复杂。
如果 Q 设置不合理,滤波器对运动模型的信任程度就会出现偏差。如果 R 设置不合理,滤波器对观测数据的信任程度也会出现偏差。
一般来说:
当 R 设置过小,滤波器会过度相信观测,估计结果容易被测量噪声带偏;
当 R 设置过大,滤波器会过度相信预测,估计结果可能出现滞后;
当 Q 设置过小,滤波器认为目标运动很稳定,面对机动变化时响应较慢;
当 Q 设置过大,滤波器认为目标运动随机性很强,估计结果可能变得不够平滑。
因此,本文采用新息协方差匹配方法,让滤波器根据实际运行过程中的新息变化来自动修正 Q 和 R。
新息协方差匹配原理
新息定义为:
ν k = z ∗ k − z ^ ∗ k ∣ k − 1 \boldsymbol{\nu}_k = \mathbf{z}*k - \hat{\mathbf{z}}*{k|k-1} νk=z∗k−z^∗k∣k−1
它表示实际观测和预测观测之间的差值。理论上,新息协方差应该接近:
S ∗ k = P ∗ z z , k \mathbf{S}*k = \mathbf{P}*{zz,k} S∗k=P∗zz,k
也就是滤波器根据当前 Q、R 计算出的理论新息协方差。
但在实际运行中,可以用最近 M 个时刻的新息计算实际新息协方差:
C ∗ k = 1 M ∑ ∗ i = k − M + 1 k ν i ν i T \mathbf{C}*k = \frac{1}{M} \sum*{i=k-M+1}^{k} \boldsymbol{\nu}_i\boldsymbol{\nu}_i^T C∗k=M1∑∗i=k−M+1kνiνiT
其中 M 是滑动窗口长度。本文代码中使用滑动窗口统计最近一段时间的新息变化,而不是只看单个时刻的新息,这样可以减少偶然噪声对参数调整的影响。
自适应调节的基本判断逻辑是:
C k > S k \mathbf{C}_k > \mathbf{S}_k Ck>Sk
说明实际新息比理论预测更大,当前滤波器可能低估了噪声,需要适当增大 Q 或 R。
C k < S k \mathbf{C}_k < \mathbf{S}_k Ck<Sk
说明实际新息比理论预测更小,当前滤波器可能高估了噪声,需要适当减小 Q 或 R。
这就是新息协方差匹配的核心思想:让实际新息统计结果和理论新息协方差尽量匹配。
观测噪声 R 的自适应调整
本文代码中,R 的调整采用平滑更新方式。首先计算实际新息协方差与理论新息协方差之间的差值:
Δ R k = C k − S k \Delta \mathbf{R}_k = \mathbf{C}_k - \mathbf{S}_k ΔRk=Ck−Sk
然后对 R 进行更新:
R ∗ k = α R R ∗ k − 1 + ( 1 − α R ) ( R k − 1 + Δ R k ) \mathbf{R}*k = \alpha_R \mathbf{R}*{k-1} + (1-\alpha_R)(\mathbf{R}_{k-1}+\Delta \mathbf{R}_k) R∗k=αRR∗k−1+(1−αR)(Rk−1+ΔRk)
其中, α R \alpha_R αR 是平滑因子。
当 α R \alpha_R αR 较大时,R 调整较平稳,不容易因为单次异常观测发生剧烈变化;
当 α R \alpha_R αR 较小时,R 调整更快,但也更容易受到噪声扰动。
本文代码中使用:
α R = 0.95 \alpha_R = 0.95 αR=0.95
这表示每次更新时大部分保留原来的 R,只引入少量新息统计修正量。这种方式比较稳健,适合演示自适应滤波的收敛过程。
为了保证数值稳定性,代码中还会对 R 进行对称化处理:
R k = R k + R k T 2 \mathbf{R}_k = \frac{\mathbf{R}_k + \mathbf{R}_k^T}{2} Rk=2Rk+RkT
并加入很小的正则项,避免矩阵奇异:
R k = R k + ε I \mathbf{R}_k = \mathbf{R}_k + \varepsilon \mathbf{I} Rk=Rk+εI
过程噪声 Q 的自适应调整
相比 R,Q 的调整通常更加谨慎。因为 Q 描述的是系统运动模型的不确定性,如果调整过快,可能会导致滤波器状态预测部分不稳定。
本文代码使用迹比值来判断是否需要调整 Q:
ρ k = tr ( C k ) tr ( S k ) \rho_k = \frac{\operatorname{tr}(\mathbf{C}_k)} {\operatorname{tr}(\mathbf{S}_k)} ρk=tr(Sk)tr(Ck)
其中, tr ( ⋅ ) \operatorname{tr}(\cdot) tr(⋅) 表示矩阵的迹,也就是矩阵对角线元素之和。
当:
ρ k > ρ u p p e r \rho_k > \rho_{upper} ρk>ρupper
说明实际新息整体偏大,需要增大 Q;
当:
ρ k < ρ l o w e r \rho_k < \rho_{lower} ρk<ρlower
说明实际新息整体偏小,需要减小 Q;
当:
ρ l o w e r ≤ ρ k ≤ ρ u p p e r \rho_{lower} \leq \rho_k \leq \rho_{upper} ρlower≤ρk≤ρupper
说明当前理论新息和实际新息差异不大,可以保持 Q 不变。
本文代码中设置:
ρ u p p e r = 1.2 \rho_{upper} = 1.2 ρupper=1.2
ρ l o w e r = 0.8 \rho_{lower} = 0.8 ρlower=0.8
也就是说,当实际新息协方差和理论新息协方差的差异在一定范围内时,不进行调整,避免 Q 来回波动。
Q 的平滑更新形式可以写成:
Q ∗ k = α Q Q ∗ k − 1 + ( 1 − α Q ) λ k Q k − 1 \mathbf{Q}*k = \alpha_Q \mathbf{Q}*{k-1} + (1-\alpha_Q)\lambda_k\mathbf{Q}_{k-1} Q∗k=αQQ∗k−1+(1−αQ)λkQk−1
其中, λ k \lambda_k λk 是根据 ρ k \rho_k ρk 得到的调整比例。代码中还对调整倍数进行了限制:
λ k ∈ 0.5 , 2 \lambda_k \in 0.5,2 λk∈0.5,2
这样可以避免 Q 在某一时刻突然变得过大或过小。
本文代码中使用:
α Q = 0.98 \alpha_Q = 0.98 αQ=0.98
可以看到,Q 的调整比 R 更慢、更保守。这也符合实际滤波调参经验:观测噪声可以相对快一点修正,而过程噪声通常需要更平滑地变化。
CM-ACKF 的整体流程
整个 CM-ACKF 的运行流程可以概括为:
- 设置目标初始状态、雷达位置、采样时间和仿真步数;
- 构建匀速运动模型和雷达非线性观测模型;
- 初始化状态估计、协方差矩阵、Q 和 R;
- 生成真实目标轨迹和带噪声雷达观测;
- 使用 CKF 进行状态预测;
- 生成容积点并通过雷达观测方程传播;
- 计算预测观测、新息、协方差和卡尔曼增益;
- 更新目标状态和协方差;
- 保存最近 M 步新息,计算实际新息协方差;
- 根据新息协方差匹配结果自适应调整 R;
- 根据迹比值自适应调整 Q;
- 输出估计轨迹、误差曲线和性能指标。
用更简洁的形式表示,就是:
预测 → 容积点传播 → 观测更新 → 新息统计 → 自适应调整Q/R \text{预测} \rightarrow \text{容积点传播} \rightarrow \text{观测更新} \rightarrow \text{新息统计} \rightarrow \text{自适应调整Q/R} 预测→容积点传播→观测更新→新息统计→自适应调整Q/R
相比经典 CKF,CM-ACKF 多出来的关键步骤就是最后的"新息统计"和"Q/R 自适应调整"。
12. 仿真结果展示
代码运行后,会依次生成多组图像结果。
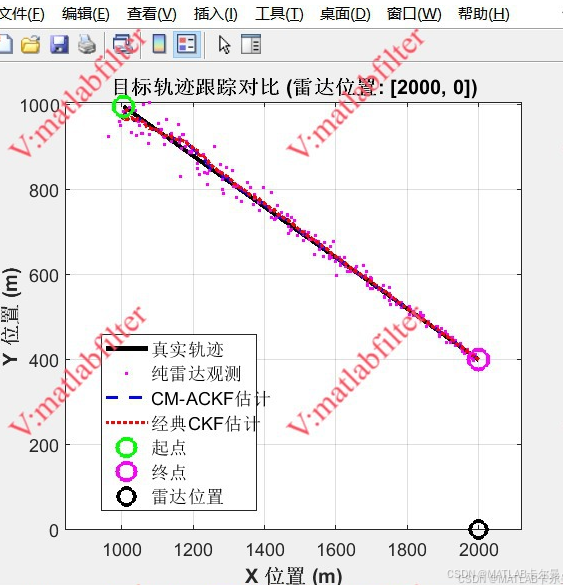
第一类结果是轨迹对比图,包括真实轨迹、纯雷达观测点、经典 CKF 估计轨迹和 CM-ACKF 估计轨迹。通过这张图可以直观看到滤波器对目标运动轨迹的跟踪能力。
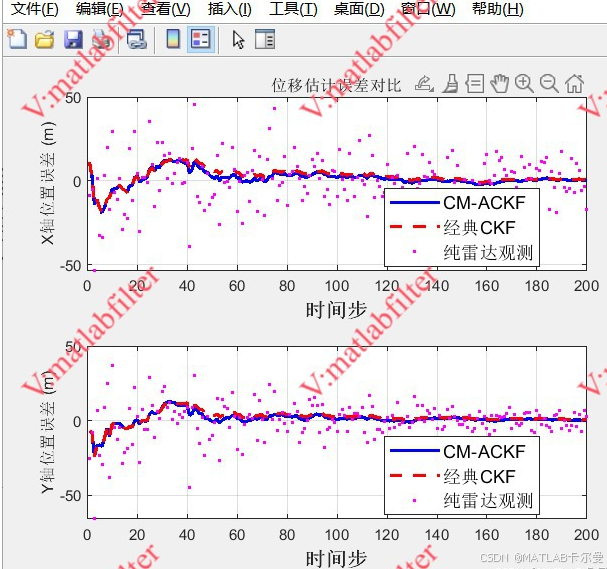
第二类结果是 X 轴和 Y 轴位置误差曲线。它可以反映不同方法在各个方向上的估计偏差。
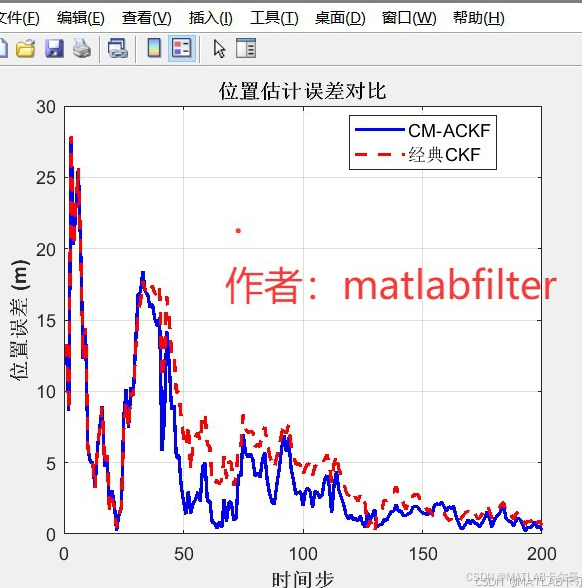
第三类结果是目标整体位置误差曲线,计算方式为:
e p o s , k = ( x k − x ^ k ) 2 + ( y k − y ^ k ) 2 e_{pos,k} = \sqrt{ (x_k-\hat{x}_k)^2 + (y_k-\hat{y}_k)^2 } epos,k=(xk−x^k)2+(yk−y^k)2
第四类结果是速度误差曲线,计算方式为:
e v e l , k = ( v x , k − v ^ ∗ x , k ) 2 + ( v ∗ y , k − v ^ y , k ) 2 e_{vel,k} = \sqrt{ (v_{x,k}-\hat{v}*{x,k})^2 + (v*{y,k}-\hat{v}_{y,k})^2 } evel,k=(vx,k−v^∗x,k)2+(v∗y,k−v^y,k)2
RMSE 评价指标
为了评价滤波性能,代码中使用了 RMSE 指标。位置 RMSE 可以写成:
R M S E p o s = 1 N ∑ k = 1 N ( x k − x \^ k ) 2 + ( y k − y \^ k ) 2 RMSE_{pos} = \sqrt{ \frac{1}{N} \sum_{k=1}^{N} \left (x_k-\\hat{x}_k)\^2 + (y_k-\\hat{y}_k)\^2 \\right } RMSEpos=N1k=1∑N(xk−x\^k)2+(yk−y\^k)2
速度 RMSE 可以写成:
R M S E v e l = 1 N ∑ k = 1 N ( v x , k − v \^ ∗ x , k ) 2 + ( v ∗ y , k − v \^ y , k ) 2 RMSE_{vel} = \sqrt{ \frac{1}{N} \sum_{k=1}^{N} \left (v_{x,k}-\\hat{v}\*{x,k})\^2 + (v\*{y,k}-\\hat{v}_{y,k})\^2 \\right } RMSEvel=N1k=1∑N(vx,k−v\^∗x,k)2+(v∗y,k−v\^y,k)2
如果 CM-ACKF 的 RMSE 小于经典 CKF,就说明自适应调节确实改善了滤波效果。
程序中还计算了误差降低比例:
η = R M S E C K F − R M S E C M − A C K F R M S E C K F × 100 \eta = \frac{RMSE_{CKF} - RMSE_{CM-ACKF}} {RMSE_{CKF}} \times 100% η=RMSECKFRMSECKF−RMSECM−ACKF×100
这个指标可以更加直观地说明自适应方法相比固定参数 CKF 的提升幅度。
代码参数说明
本文代码中有几个比较重要的参数:
| 参数 | 含义 | 作用 |
|---|---|---|
radar_pos |
雷达位置 | 决定测距和测角参考点 |
dt |
采样时间 | 决定状态更新间隔 |
N |
仿真步数 | 决定轨迹长度 |
M |
滑动窗口长度 | 决定新息统计范围 |
q_true |
真实过程噪声标准差 | 模拟目标运动随机性 |
sigma_r |
距离测量噪声标准差 | 模拟雷达测距误差 |
sigma_theta |
角度测量噪声标准差 | 模拟雷达测角误差 |
Q_init_factor |
Q 初始估计倍数 | 测试 Q 设置不准时的自适应能力 |
R_init_factor |
R 初始估计倍数 | 测试 R 设置不准时的自适应能力 |
alpha_R |
R 平滑因子 | 控制 R 的调整速度 |
alpha_Q |
Q 平滑因子 | 控制 Q 的调整速度 |
trace_ratio_upper |
Q 调整上阈值 | 判断是否增大 Q |
trace_ratio_lower |
Q 调整下阈值 | 判断是否减小 Q |
其中,M、alpha_R 和 alpha_Q 对自适应效果影响比较明显。
一般来说:
- M 太小,新息统计不稳定,参数容易抖动;
- M 太大,自适应响应变慢;
- alpha 太小,调整速度快但容易受异常值影响;
- alpha 太大,调整平稳但收敛较慢。
在实际使用中,可以根据目标运动强度和观测噪声变化情况进行微调。