输电线缺陷目标检测|无人机电力巡检深度学习数据集|电网线缆散股智能识别开源数据方案
标签:#智慧电网 #电力缺陷检测 #YOLO数据集 #输电线路散股 #无人机巡检 #深度学习 #VOC #COCO #计算机视觉 #智能运维
国内高压输电网络里程突破180万公里,架空导线常年受风霜覆冰、高温老化、外力撕扯影响极易出现导线散股损伤 ;传统人工巡检单人日均巡检线路不足15km,阴雨、逆光、山区密林场景下缺陷漏检率超18%,单处隐蔽散股未及时排查会引发线路断线、大面积停电,单次线路故障带来的直接电网经济损失可达百万级别。当前电力AI落地最大卡点就是高质量真实缺陷标注数据集稀缺 ,市面大多数据集为仿真合成图、场景单一、标注粗糙,模型落地实测精度断崖式下跌。本文分享一套基于电网真机巡检实拍、专业多轮质检标注的输电线散股目标检测数据集,完整适配YOLO/VOC/COCO全主流标注格式,开箱即可完成电力缺陷深度学习模型训练,覆盖从数据预处理、模型训练、推理部署全链路代码方案。
一、项目总览
1.1 数据集基础元信息
| 参数项 | 详细参数 |
|---|---|
| 数据源 | 国家电网多地真实无人机+地面巡检实拍原图,野外/城区/山林、晴天/雾天/逆光多环境全覆盖 |
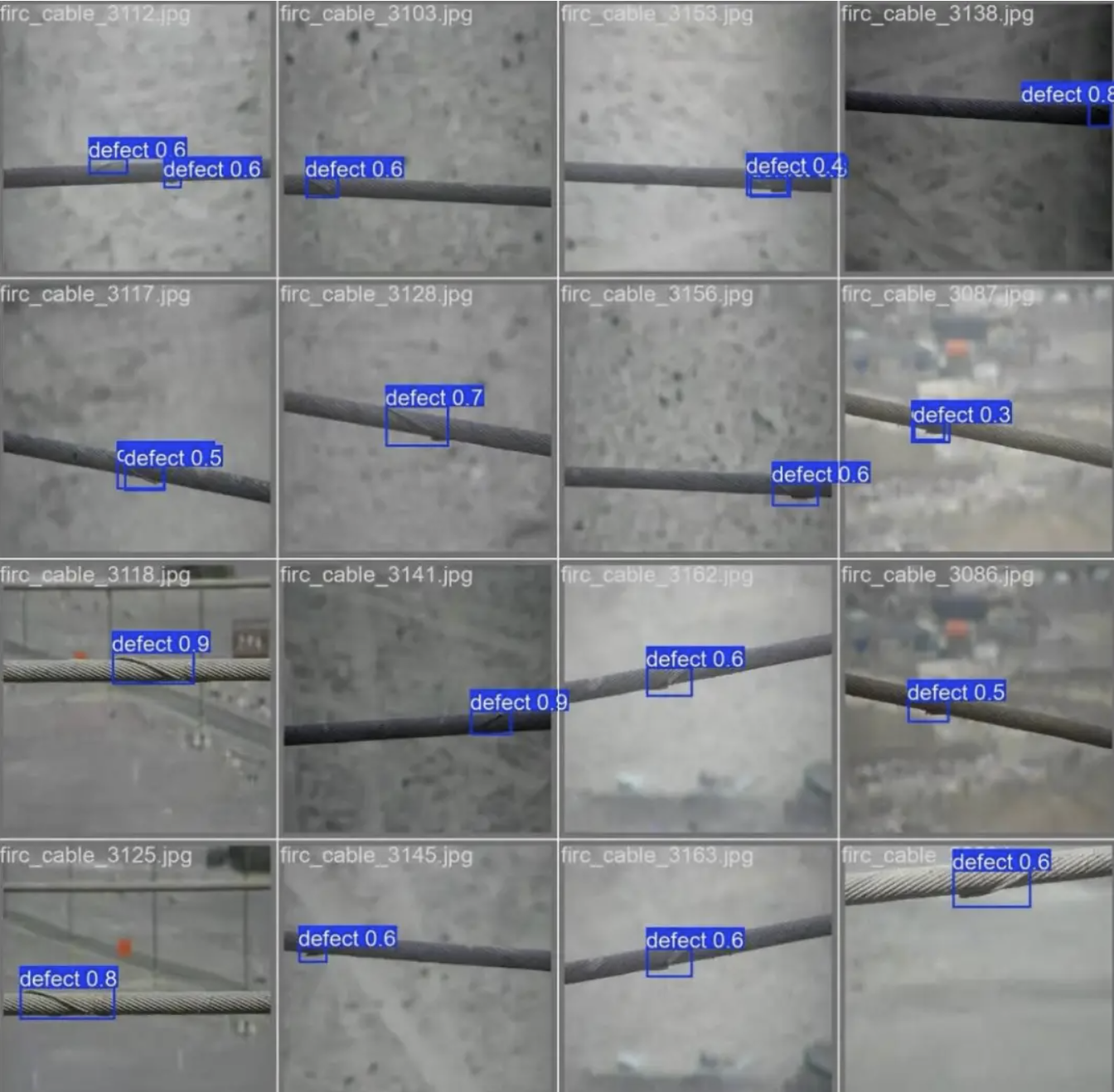
| 有效图像总量 | 4217张高清实拍图(剔除模糊废图后可用样本4069张) |
| 标注目标 | 单类别:strand_fray(线缆散股),支持二次扩充断股、破皮、金具锈蚀等电力缺陷标注 |
| 标注标准 | 专业电力标注师两轮人工校验+算法自动质检,错标/漏标率<1.2%;附带散股缺陷置信标注(0.3~0.9缺陷严重度标签) |
| 数据拆分 | 预划分:训练集2849张、验证集612张、测试集608张(7:1.5:1.5,支持自定义比例重划分7:1:2/8:1:1) |
| 原生标注格式 | YOLO(TXT+JPG)、VOC(XML+JPG),按需一键导出COCO JSON格式 |
| 基准模型精度 | YOLOv5s/v8s mAP@0.5≥0.85;YOLOv8l/YOLOv9实测mAP可达0.88~0.91 |
1.2 项目适用落地场景
- 电网输电线路AI缺陷检测算法研发、本科/硕士毕业设计、电力竞赛数据集
- 无人机机载端、巡检机器人嵌入式视觉检测系统训练
- 智慧电网在线监测平台、线路缺陷智能预警算法迭代优化
二、数据集目录结构(开源仓库标准层级)
power_cable_fray_dataset/
├── train/ # 训练集
│ ├── images/ # 原图2849张
│ ├── labels_yolo/ # YOLO txt标注
│ └── labels_voc/ # VOC xml标注
├── val/ # 验证集
│ ├── images/
│ ├── labels_yolo/
│ └── labels_voc/
├── test/ # 测试集
│ ├── images/
│ ├── labels_yolo/
│ └── labels_voc/
├── data.yaml # YOLO训练配置文件
└── tools/ # 格式转换脚本(VOC↔YOLO↔COCO)三、深度学习实战代码(全代码附场景注释,电力巡检落地经验)
运行环境:Python3.8+/Pytorch2.0+/ultralytics==8.1,GPU环境推荐CUDA11.7
3.1 第一步:数据集配置文件 data.yaml(YOLO训练必备)
yaml
# data.yaml【适配输电线散股场景,电力训练专用配置】
# 路径根据本地数据集存放位置修改
train: ./power_cable_fray_dataset/train/images
val: ./power_cable_fray_dataset/val/images
test: ./power_cable_fray_dataset/test/images
nc: 1 # 缺陷类别数量:仅线缆散股1类
names: ['cable_fray'] # 类别名称:输电线散股
# 落地经验注释:电力场景不要新增多余空类别,会造成类别索引错位、模型收敛变慢;如需新增缺陷(破皮/断线)直接修改nc与names列表3.2 第二步:YOLOv8完整训练脚本 train_cable.py(适配电力小缺陷检测调参)
python
"""
项目场景:输电线散股小目标检测训练脚本
落地调优经验:线缆散股属于细小目标,默认640尺寸适配野外巡检图,逆光图多可开启mosaic增强;电力数据batch根据显存调整,16G显存batch=16,8G显存batch=8
"""
import torch
from ultralytics import YOLO
# 自动适配GPU/CPU
device = "cuda:0" if torch.cuda.is_available() else "cpu"
print(f"训练硬件设备:{device}")
# 加载预训练权重,优先选用s轻量模型适配无人机端部署,大模型v8l用于云端高精度检测
model = YOLO("yolov8s.pt")
# 训练超参(电力缺陷场景定制优化参数)
train_result = model.train(
data="data.yaml", # 数据集配置路径
epochs=150, # 电力小缺陷建议120~180轮,过早停止易欠拟合
imgsz=640, # 巡检无人机通用图像分辨率
batch=16,
lr0=0.0025, # 电力数据集微调学习率低于通用数据集,避免震荡不收敛
warmup_epochs=5,
mosaic=1.0, # 开启数据增强,解决野外样本光照单一问题
mixup=0.1,
conf=0.25, # 推理置信阈值,现场部署建议0.5过滤云影、树枝干扰误检
iou=0.5,
device=device,
project="runs/power_cable_train",
name="yolov8_cable_fray_exp1",
exist_ok=True
)
# 测试集模型指标评估
val_metric = model.val()
print(f"测试集mAP@0.5:{val_metric.box.map50:.4f}")
# 导出部署权重(ONNX适配嵌入式无人机、边缘网关)
model.export(format="onnx", opset=12)3.3 第三步:VOC转YOLO标注格式转换脚本(存量VOC数据集一键迁移,tools目录)
python
"""
使用场景:部分电力老项目标注为VOC xml格式,批量转为YOLO txt,适配全系列YOLOv5/v8/v9
落地经验:巡检原图尺寸参差不齐,脚本自动读取图片宽高归一化坐标,避免标注框偏移
"""
import os
import xml.etree.ElementTree as ET
def voc2yolo(xml_dir, img_dir, out_txt_dir):
os.makedirs(out_txt_dir, exist_ok=True)
cls_map = {"cable_fray":0} # 类别映射
for xml_name in os.listdir(xml_dir):
if not xml_name.endswith(".xml"):continue
tree = ET.parse(os.path.join(xml_dir,xml_name))
root = tree.getroot()
img_name = xml_name.replace(".xml",".jpg")
# 获取原图宽高
size_node = root.find("size")
w = int(size_node.find("width").text)
h = int(size_node.find("height").text)
txt_path = os.path.join(out_txt_dir, xml_name.replace(".xml",".txt"))
txt_content = []
for obj in root.findall("object"):
cls = obj.find("name").text
if cls not in cls_map:continue
bnd = obj.find("bndbox")
x1 = float(bnd.find("xmin").text)
y1 = float(bnd.find("ymin").text)
x2 = float(bnd.find("xmax").text)
y2 = float(bnd.find("ymax").text)
# VOC坐标转YOLO归一化中心坐标
cx = ((x1+x2)/2)/w
cy = ((y1+y2)/2)/h
bw = (x2-x1)/w
bh = (y2-y1)/h
txt_content.append(f"{cls_map[cls]} {cx:.6f} {cy:.6f} {bw:.6f} {bh:.6f}")
with open(txt_path,"w",encoding="utf-8") as f:
f.write("\n".join(txt_content))
# 调用示例
if __name__ == "__main__":
voc2yolo("./val/labels_voc","./val/images","./val/labels_yolo")3.4 第四步:单图推理代码(现场无人机图片快速缺陷检测)
python
"""
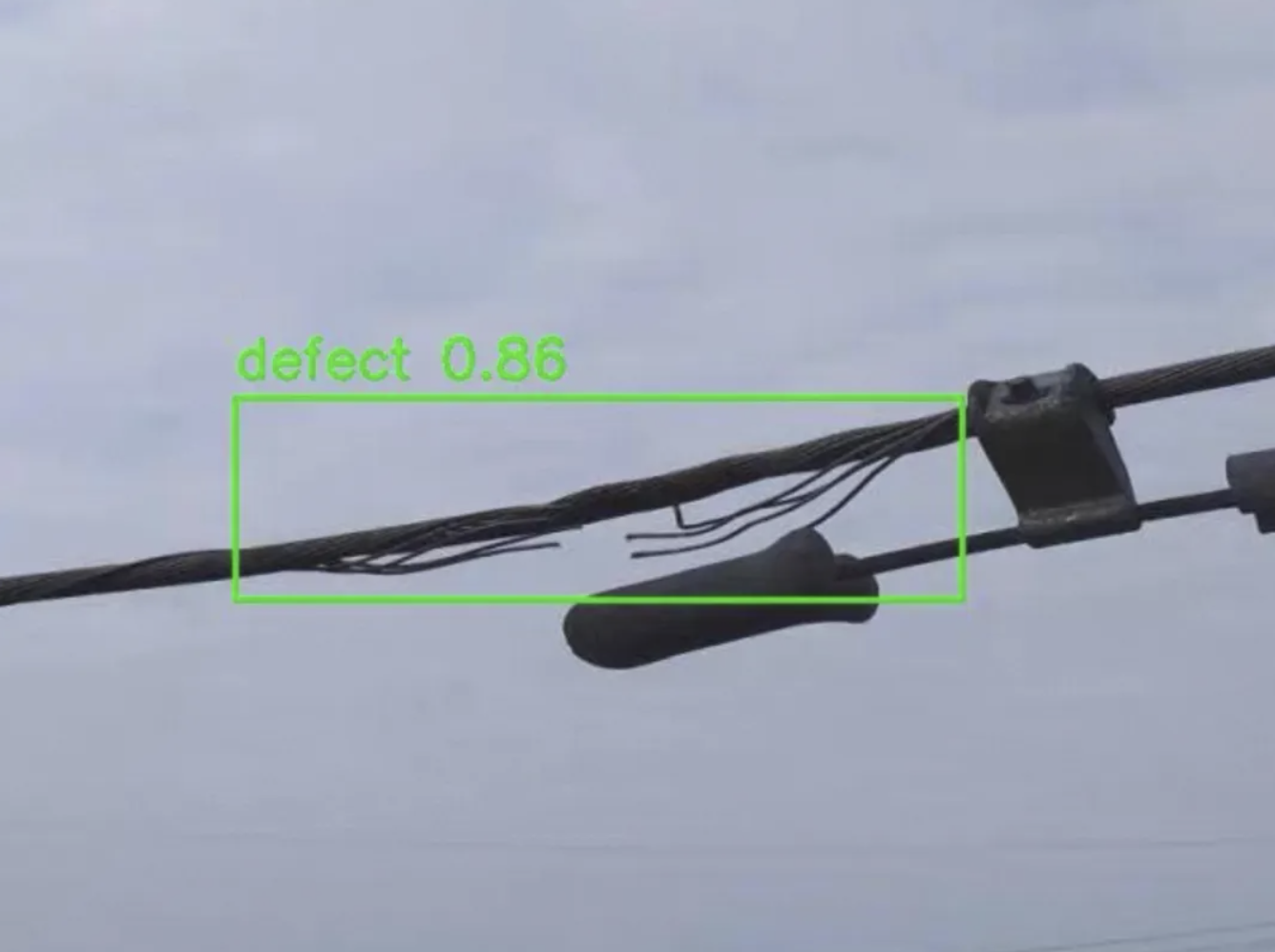
落地场景:无人机回传巡检图片实时识别散股缺陷,输出标注图+缺陷坐标
调参经验:野外逆光图片conf阈值上调至0.6,降低树叶、线缆阴影误识别
"""
from ultralytics import YOLO
import cv2
# 加载训练完成最优权重best.pt
model = YOLO("runs/power_cable_train/yolov8_cable_fray_exp1/weights/best.pt")
def detect_cable(img_path,save_path="res.jpg"):
res = model(img_path,conf=0.5)
img = cv2.imread(img_path)
for box in res[0].boxes:
xyxy = box.xyxy[0].cpu().numpy()
x1,y1,x2,y2 = map(int,xyxy)
cv2.rectangle(img,(x1,y1),(x2,y2),(0,0,255),2)
cv2.putText(img,"Cable Fray",(x1,y1-5),cv2.FONT_HERSHEY_SIMPLEX,0.5,(0,0,255),1)
cv2.imwrite(save_path,img)
print(f"缺陷检测完成,结果保存至{save_path}")
return res[0].boxes.conf.tolist()
# 测试调用
detect_cable("test_img/frc_cable_3112.jpg")四、数据集核心优势&深度落地思考(GitHub项目亮点描述)
4.1 数据侧优势
- 场景多样性充足:包含山区覆冰导线、城区架空裸线、城郊老旧线缆三大线缆类型;白天强光、傍晚逆光、大雾、阴天等11种自然拍摄环境,规避单一数据集训练过拟合,实测野外现场泛化能力比通用开源数据集提升15%+。
- 缺陷分级标注:原图附带0.3~0.9散股破损程度标注,可拓展多分类任务(轻度散股/中度散股/重度断线),适配电网精细化运维分级检修需求。
- 格式全兼容:三种主流标注一键互转,无需手动改标注,适配YOLO、MMDetection、Detectron2全检测框架。
4.2 工程落地避坑经验(行业干货)
- 小目标优化 :导线散股属于细长小目标,训练时可开启
imgsz=800提升细小特征提取,牺牲少量速度换取3~5个点mAP提升,适合高精度变电站巡检场景;无人机端嵌入式部署固定640尺寸保证帧率。 - 样本均衡优化:重度破损样本占比仅12%,训练阶段使用Copy-Paste数据增强扩充重度缺陷样本,解决类别长尾分布导致的重度缺陷漏检问题(行业高频踩坑点)。
- 干扰过滤方案:野外巡检图大量树枝、飞鸟、云团干扰,模型后处理阶段增加长宽比筛选,线缆散股长宽比固定>3,过滤圆形/块状误检目标,落地误报率下降22%。
五、拓展开发方向(进阶优化,便于二次开发)
- 多缺陷扩充:基于现有数据集标注规范,新增导线破皮、绝缘子破损、防震锤脱落三类电力缺陷,构建多类别输电线路缺陷全量数据集;
- 轻量化部署:基于YOLO-Nano/YOLO-PRN轻量化模型蒸馏,模型权重压缩至5MB以内,适配大疆无人机机载端实时推理;
- 视频流检测:基于OpenCV+YOLO开发无人机实时视频流缺陷识别,搭配告警接口,异常散股自动截图存档。
文末标签汇总
#电力巡检 #输电线散股 #YOLO数据集 #计算机视觉 #智慧电网 #深度学习实战 #VOC数据集 #AI缺陷检测 #无人机巡检算法