一、项目介绍
基于PCT Planner 的多楼层3D全局路径规划技术创新性地解决了多楼层3D导航的难题,整个工作流程主要分为环境预处理 和路径规划两部分。
1. 整体工作流概览
规划的核心思想,是利用点云生成一系列2D"断层扫描图像(Tomogram)"作为多楼层导航的基础地图。整个工作流程可以分为线下和线上两个阶段:
-
线下预处理 (Tomography) :输入原始3D点云地图,通过GPU加速的断层扫描算法,生成一张2.5D的可通行性代价地图(Tomogram) ,格式为.pickle文件。
-
线上规划 (Planning):在RViz2中交互式选择起点和终点,规划器会在这张预处理好的地图上进行A*搜索,得到一条平滑的3D路径,并实时避开悬空障碍物。
2. 可通行区域判断:从3D点云到2.5D代价图
判断"哪里能走"的本质,是通过层析技术将复杂的3D空间降维成易于计算的2.5D地图,具体包含以下核心步骤:
-
生成层析切片 (Tomogram Slices) :算法沿Z轴以固定分辨率扫描点云,在每个垂直区间内,计算出局部地面高度 和天花板高度,将包含楼板、斜坡等不同高度的物理结构编码为多个2D切片。
-
评估机器人运动能力:在每个切片上,算法会综合考量机器人的尺寸和通过性,计算出每个位置的可通行性代价值。
可通行性代价值(
intensity):
物理尺寸 :确保有足够的最小垂直净空 (如0.50米)和碰撞安全半径 (如0.40米)。
台阶与坡度 :评估机器人能否跨过最大台阶高度 (step_max,如
0.17米)或爬上最大坡度 (slope_max,如23°)的区域。安全性边际 :除了硬性的障碍物,还会设置渐变的成本区域(inflation),让路径规划更自然地与障碍物保持距离。
3. 上下楼路径规划:在层析切片间无缝探索
这是PCT Planner的关键创新之一。它通过以下方式实现了上下楼的连续规划:
-
跨越切片的通用搜索 :规划器将不同楼层的层析切片视为一个统一的图(Graph)进行搜索,搜索逻辑在物理上天然支持跨楼层。
-
以3D点连接不同楼层:楼梯或坡道在3D点云中表现为连续的斜面。算法在每个高度切片上检测到这些过渡区域,并通过搜索算法将其平滑地连接起来,从而在生成的最终3D路径中,自动包含从起点楼层到终点楼层的完整上下楼轨迹。
二、部署指南
1. 环境准备
安装ROS2 Humble、CUDA 12.x以及cmake、gcc、eigen3等系统工具。
(1)硬件与软件环境
建议先确认以下基础条件:
-
操作系统:Ubuntu 22.04 LTS
-
ROS2 发行版:Humble Hawksbill(桌面完整版)
-
CUDA :11.5(系统预装,通过
nvidia-smi确认驱动支持的 CUDA 版本) -
Python:3.10
(2)检查 CUDA 和驱动
打开终端,输入:
bash
nvidia-smi查看驱动最高支持的CUDA版本:

打开终端,输入:
bash
nvcc --version查看实际安装的 CUDA Toolkit 版本:

注意 :如果 nvcc 显示 CUDA 11.x,则必须安装 cupy-cuda11x;若显示 CUDA 12.x,则使用 cupy-cuda12x。
2. 获取源码并安装系统依赖
(1)创建工作空间并克隆仓库
打开终端,输入:
bash
mkdir -p ~/d7lros2/PCT_ws
bash
cd ~/d7lros2/PCT_ws克隆仓库:
bash
git clone https://github.com/rvxfahim/PCT_planner.git
bash
cd PCT_planner(2)安装依赖
更新源:
bash
sudo apt update安装依赖:
bash
sudo apt install -y libeigen3-dev libboost-all-dev cmake build-essential(3)设置 Python 虚拟环境
为避免依赖冲突,使用 Python 虚拟环境。
创建虚拟环境:
bash
python3 -m venv ~/pct_venv激活虚拟环境:
bash
source ~/pct_venv/bin/activate注意: ****每次使用前都需要重新激活虚拟环境。
升级 pip:
bash
pip install --upgrade pip(4)安装 Python 依赖
安装基础依赖:
bash
pip install numpy==1.24.3
pip install scipy==1.10.1
pip install open3d==0.17.0
pip install scikit-learn==1.2.2(5)安装 CuPy
根据 nvcc --version 显示的 CUDA 版本选择:
如果是CUDA 11.x,输入:
bash
pip install cupy-cuda11x==13.6.0如果是CUDA 12.x,输入:
bash
pip install cupy-cuda12x==13.6.0验证安装:
bash
python3 -c "import cupy as cp; print(f'CuPy version: {cp.__version__}'); print(f'CUDA available: {cp.cuda.is_available()}')"
3. 编译 C++ 依赖库(GTSAM + OSQP)
打开终端,输入:
bash
cd ~/d7lros2/PCT_ws/PCT_planner/planner编译第三方库(约 5--10 分钟):
bash
bash build_thirdparty.sh编译 pybind11 模块:
bash
bash build.sh编译完成后,会在 planner/lib/ 目录下生成 .so 文件。
三、测试验证
1. 准备点云数据
(1)使用示例点云(Building 场景)
打开终端,输入:
bash
cd ~/d7lros2/PCT_ws/PCT_planner解压缩点云文件:
bash
unzip rsc/pcd/pcd_files.zip -d rsc/pcd/(2)使用自定义点云(可选)
将自定义的 .pcd 文件复制到 rsc/pcd/,例如:
bash
cp /path/to/your_cloud.pcd rsc/pcd/clinic.pcd2. 生成断层扫描地图(Tomogram)
(1)为 Building 场景生成
打开终端,输入:
bash
cd ~/d7lros2/PCT_ws/PCT_planner/tomography/scripts激活环境:
bash
source ~/pct_venv/bin/activate场景生成:
bash
python3 run_standalone.py --scene Building成功输出示例:
bash[INFO] Loading PCD: .../building2_9.pcd [INFO] PCD points: 853227 [INFO] Map center: [-0.37, 1.37] [INFO] Dim_x: 285, Dim_y: 150 [INFO] Num slices init: 30 → simplified: 8 [INFO] Tomogram exported: .../rsc/tomogram/building2_9.pickle
(2)为自定义场景(如 clinic)生成
需先在 tomography/config/ 下创建 scene_clinic.py 配置文件(可参考 scene_building.py),然后运行:
bash
python3 run_standalone.py --scene Clinic3. 运行路径规划(无 ROS 测试,可选)
先验证整个流程是否正常,不依赖 ROS。打开终端,输入:
bash
cd ~/d7lros2/PCT_ws/PCT_planner/planner/scripts激活环境:
bash
source ~/pct_venv/bin/activate运行路径规划:
bash
python3 plan_standalone.py --scene Building如果成功,会输出路径规划信息和保存的轨迹文件。
4. 启动 ROS2 交互式规划
(1)准备符号链接(使节点能找到点云和 tomogram)
节点默认寻找 rsc/pcd/clinic.pcd 和 rsc/tomogram/clinic.pickle。我们可以用 Building 的数据建立链接:
bash
cd ~/d7lros2/PCT_ws/PCT_planner
bash
ln -sf rsc/pcd/building2_9.pcd rsc/pcd/clinic.pcd
ln -sf rsc/tomogram/building2_9.pickle rsc/tomogram/clinic.pickle(2)启动 RViz2 可视化
打开一个终端,激活虚拟环境并 source ROS2:
bash
source ~/pct_venv/bin/activate
source /opt/ros/humble/setup.bash到你的工作目录:
bash
cd ~/d7lros2/PCT_ws/PCT_planner启动RVIZ:
bash
rviz2 -d rsc/rviz/pct_ros2.rviz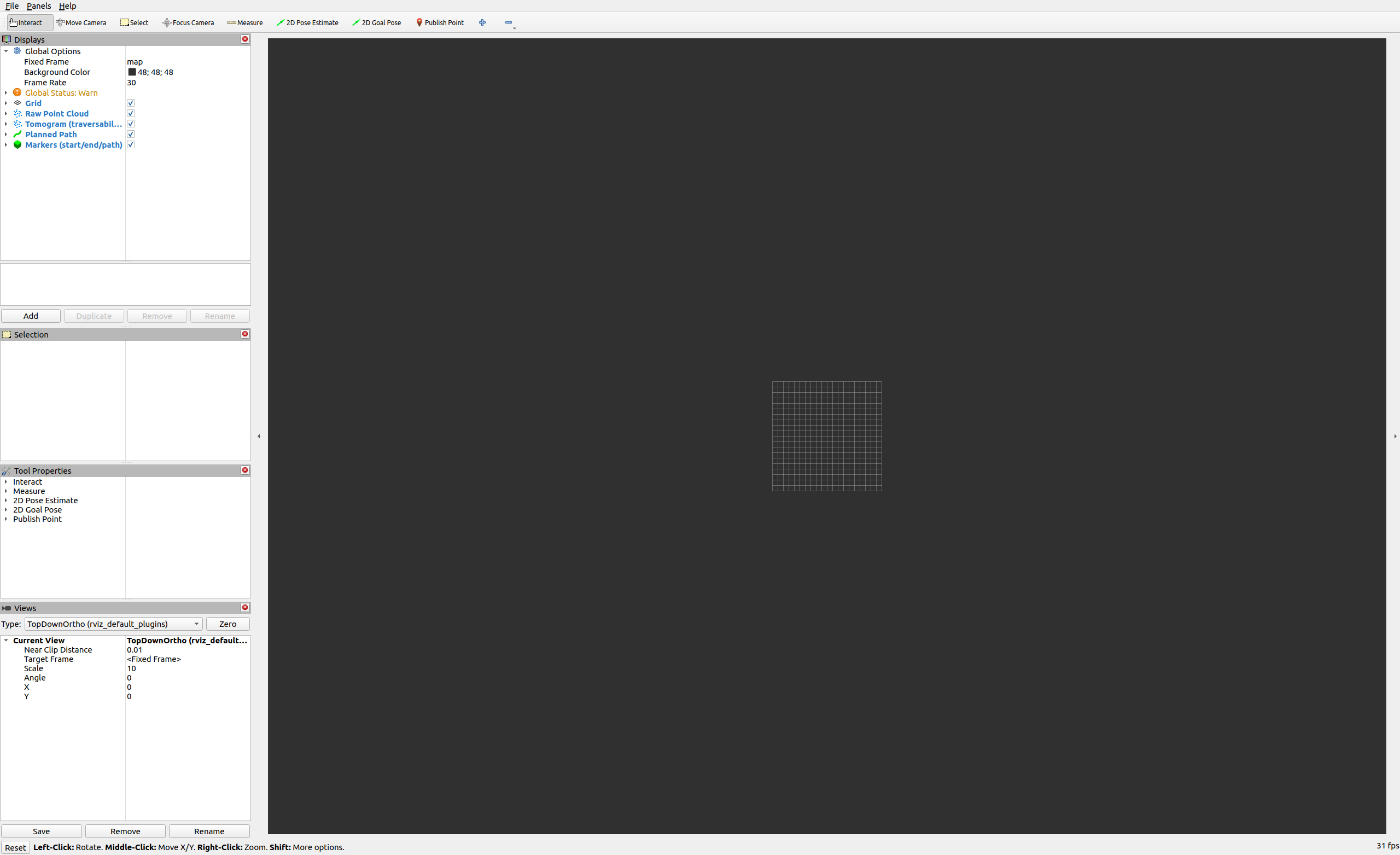
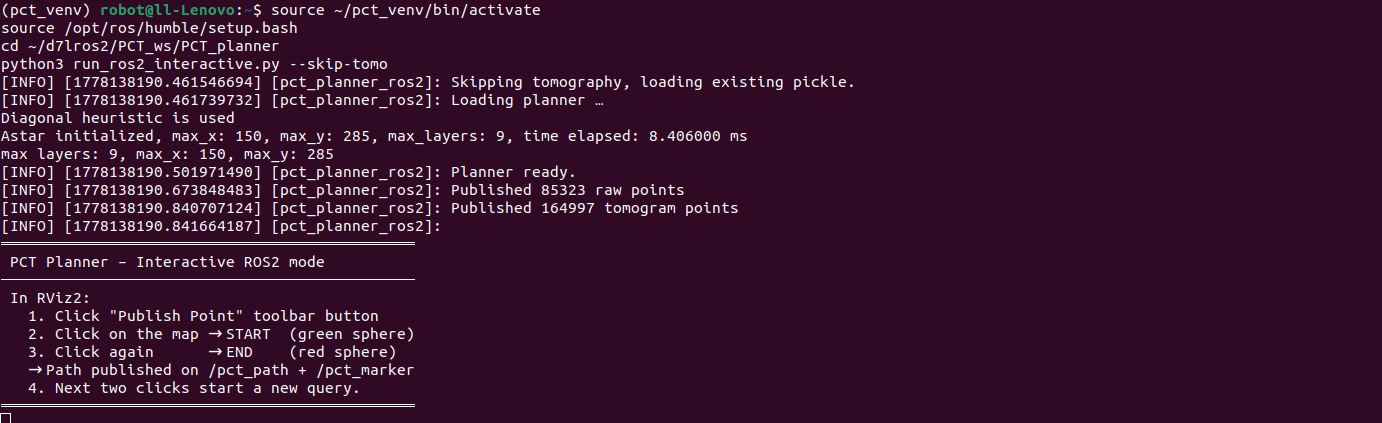
(3)启动 ROS2 规划节点
打开另一个终端,激活虚拟环境并 source ROS2:
bash
source ~/pct_venv/bin/activate
source /opt/ros/humble/setup.bash到你的工作目录:
bash
cd ~/d7lros2/PCT_ws/PCT_planner运行路径规划:
bash
python3 run_ros2_interactive.py --skip-tomo参数 --skip-tomo 表示使用已有的 tomogram 文件,不再重新生成。
5. 在 RViz2 中交互式规划
(1)设置 Fixed Frame
在 RViz 左侧 Global Options 中,设置 Fixed Frame 为 map:

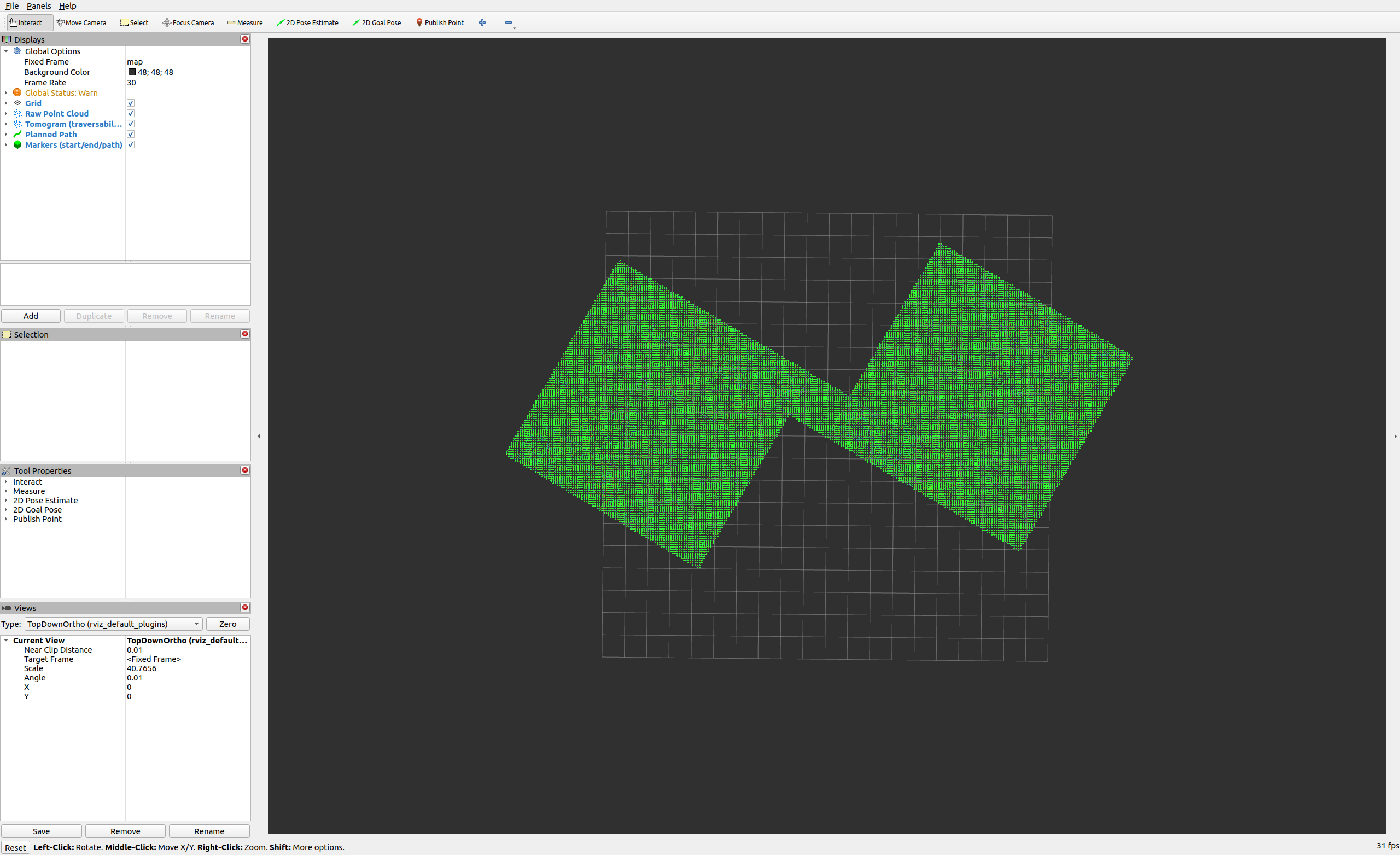
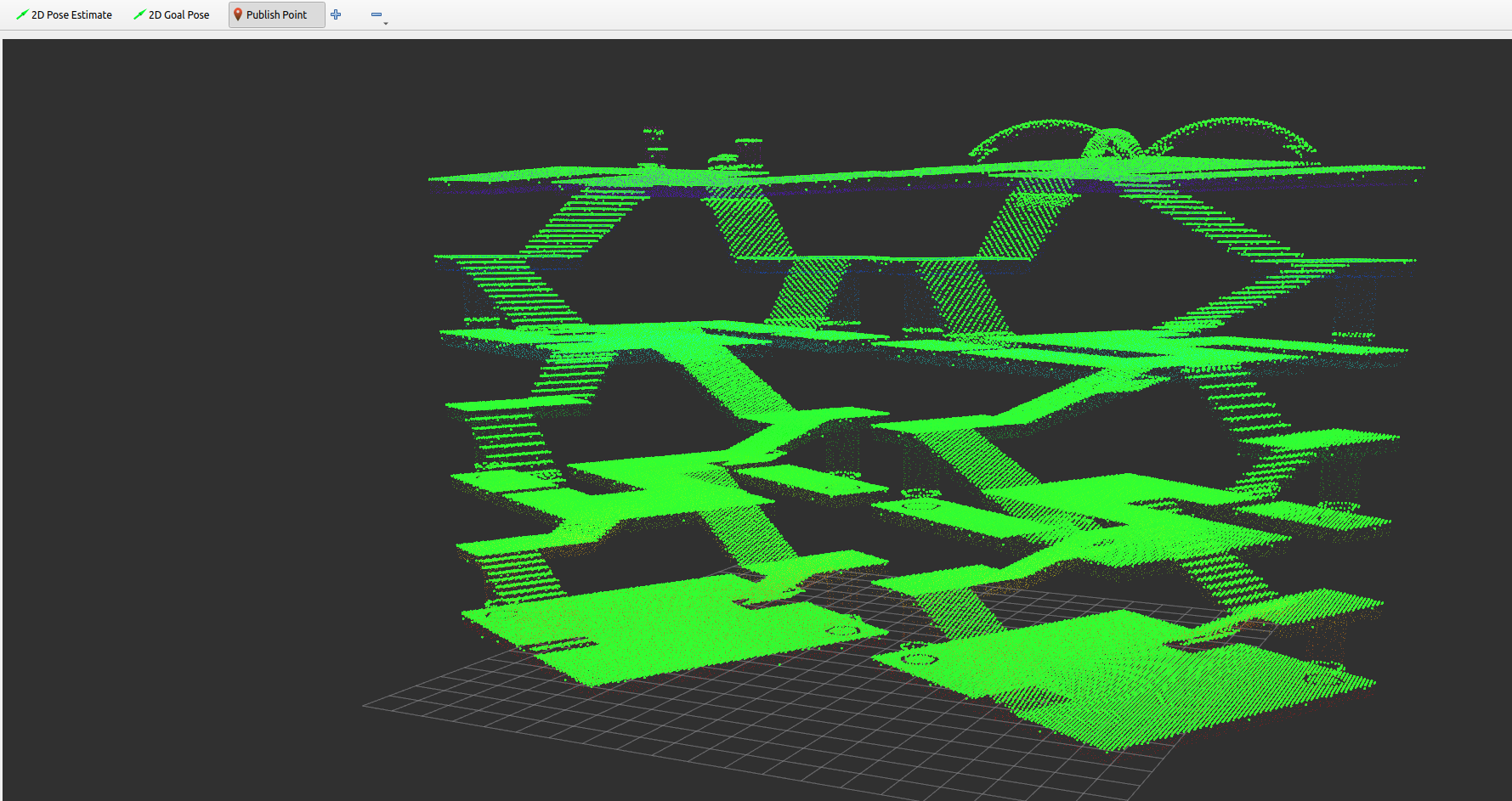
(2)显示点云和 tomogram
在 Displays 面板中,确保 Raw Point Cloud 和 Tomogram 都已勾选。
对于每个 PointCloud2 显示项,设置:
-
Style : Points 或 Squares
-
Size : 0.05 ~ 0.1
-
Color Transformer : Intensity(tomogram)或 AxisColor(调试)
6. 选择起点和终点
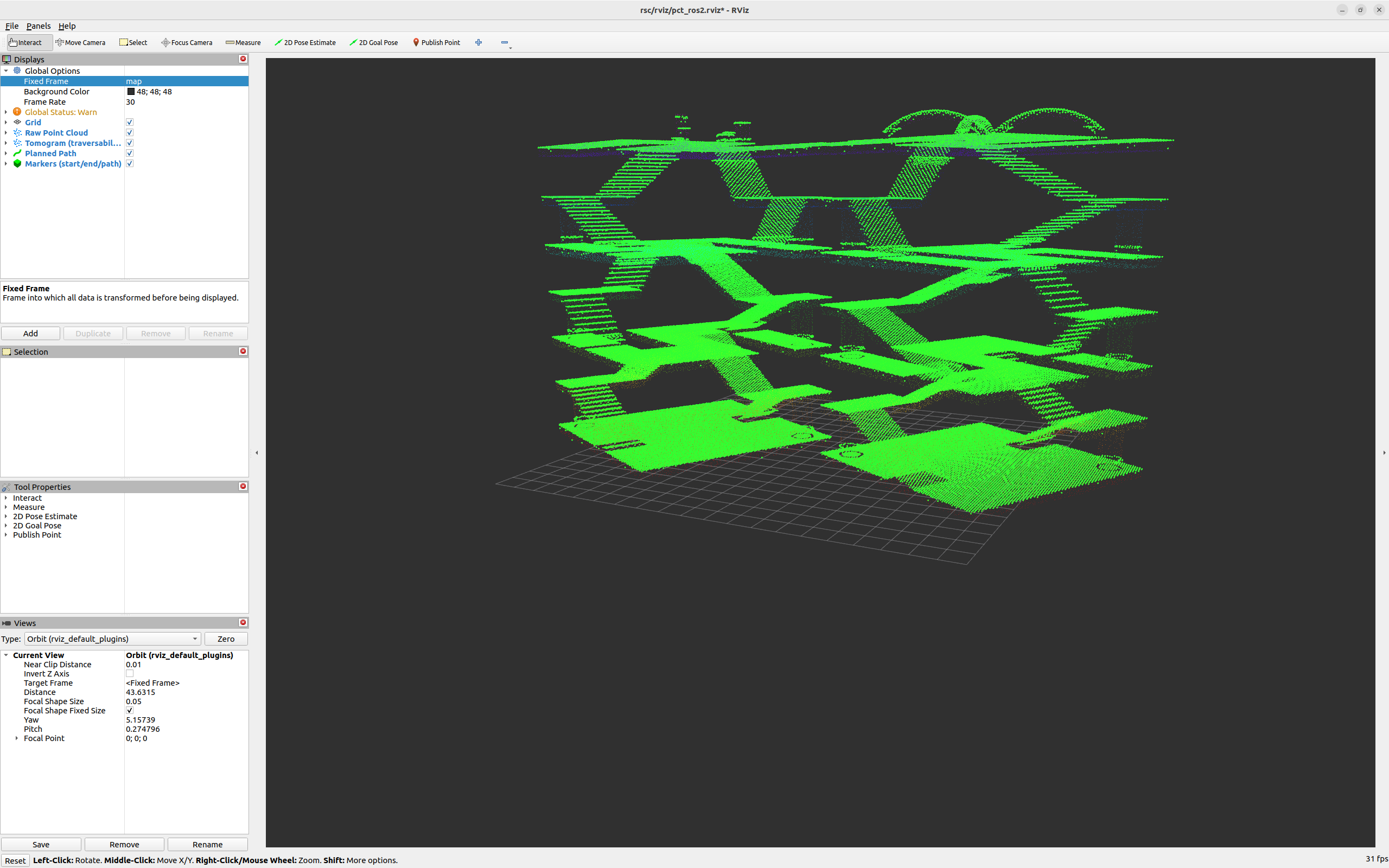
(1)切换为Orbit
左下角选择Orbit:

可以发现右边不再是俯视图:
(2)选择起点
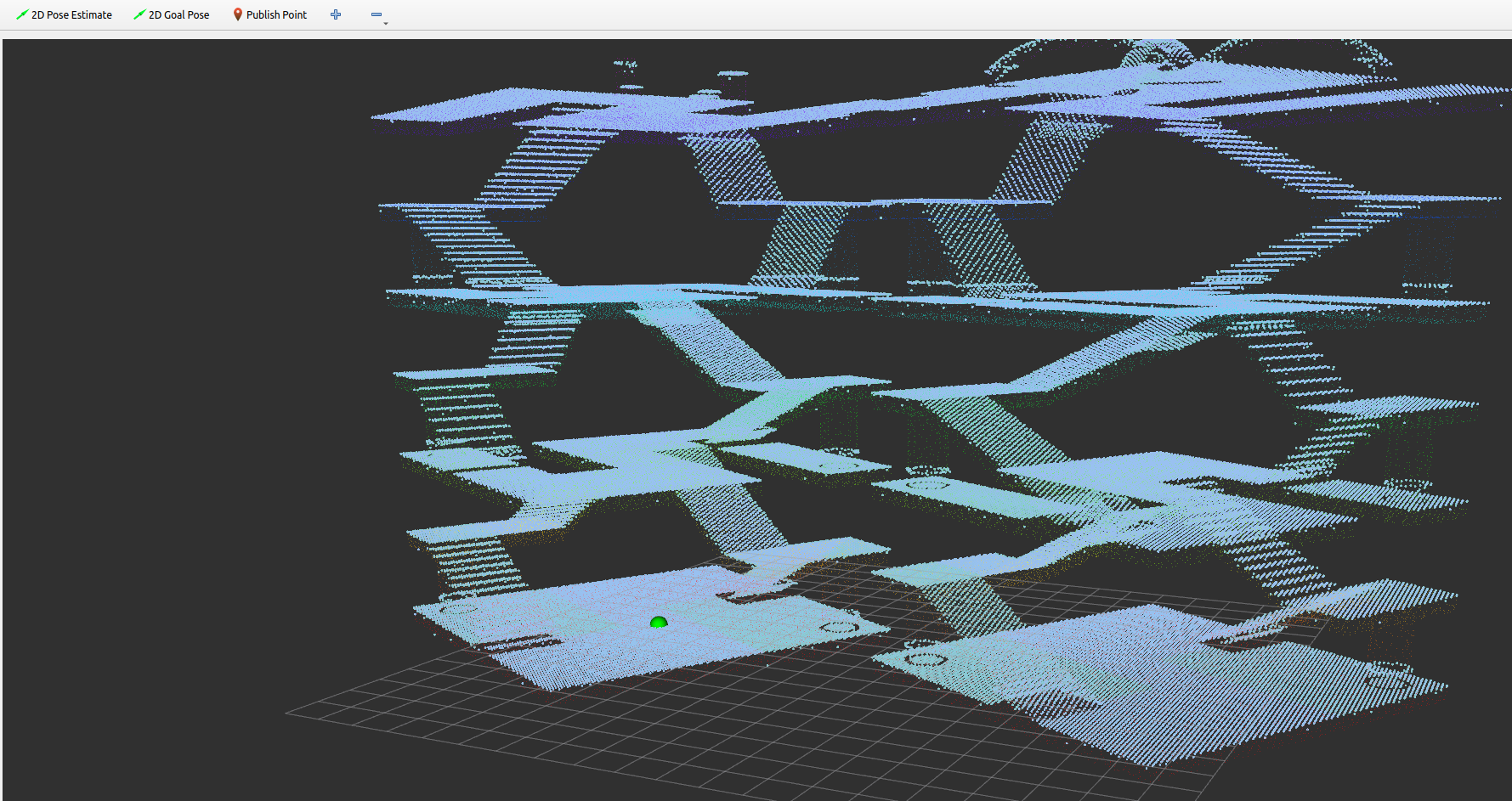
点击工具栏的 Publish Point 按钮:
在点云地图上单击设置起点(绿色球体出现):
(3)选择终点
在另一处单击设置终点(红色球体出现):
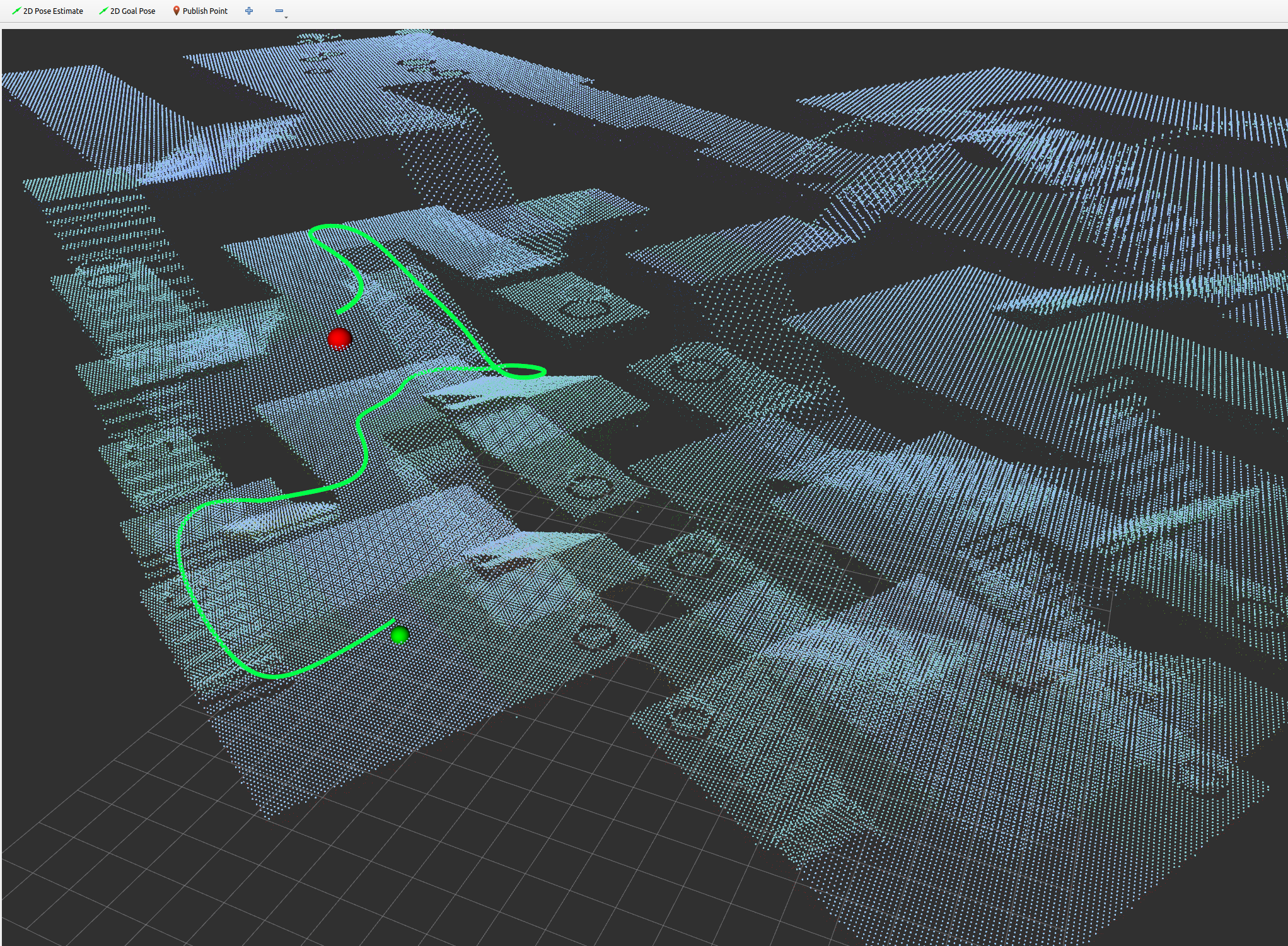
规划器自动运行,成功后显示绿色路径线(/pct_path)。
(一)常见问题及解决方法汇总
问题现象 原因 解决方案 ModuleNotFoundError: No module named 'cupy'未安装 CuPy 根据 nvcc --version安装对应版本cupy-cuda11x或cupy-cuda12xImportError: numpy.core.multiarray failed to importNumPy 版本与 CuPy 不兼容 固定 NumPy 版本 pip install numpy==1.24.3OSError: libnvrtc.so.12: cannot open shared object fileCuPy 版本与系统 CUDA 不匹配 系统 CUDA 11.5 却安装了 cupy-cuda12x,改用cupy-cuda11xValueError: zero-size array在 ROS2 节点启动时找不到 .pcd文件创建符号链接指向存在的点云,或检查路径 RViz 中显示 Showing [0] pointsFrame_id 不匹配或 QoS 问题 将 Global Options 的 Fixed Frame 设置为 map或清空;重启节点RViz 中看不到任何点云 视图未对准 将 Views 类型改为 Orbit,点击 Reset,然后缩放/旋转找到点云Tomography 运行后生成的文件名不是 clinic.pickle脚本默认使用场景名 创建符号链接或修改 run_ros2_interactive.py中的文件名(二)参数调优参考
如需调整机器人尺寸、步高、坡度等,修改
tomography/config/scene_clinic.py中的参数,然后重新生成 tomogram。详细说明见项目中的PARAMETERS.md。关键参数示例:
map.resolution:栅格分辨率(默认 0.10 m)
trav.safe_margin:碰撞半径(默认 0.4 m)
trav.step_max:最大可跨越台阶高度(默认 0.17 m)
trav.slope_max:最大可爬坡度(默认 0.40 rad ≈ 23°)(三)完整部署检查清单
Ubuntu 22.04 + ROS2 Humble
NVIDIA 驱动正常,
nvidia-smi运行无误
nvcc显示 CUDA 版本(11.x 或 12.x)克隆仓库并安装系统依赖
创建 Python 虚拟环境并激活
安装 NumPy 1.24.3、SciPy、Open3D、scikit-learn
安装与 CUDA 版本匹配的 CuPy
编译 GTSAM 和 OSQP(
build_thirdparty.sh)编译 pybind11 模块(
build.sh)解压示例点云或准备自定义点云
生成 tomogram(
run_standalone.py --scene Building)测试无 ROS 规划(
plan_standalone.py)创建符号链接使 ROS2 节点能加载数据
启动 ROS2 节点(
run_ros2_interactive.py --skip-tomo)启动 RViz2,调整 Fixed Frame 和视图
在 RViz 中点击起点和终点,成功生成路径