摘要
针对直流电动机调速对动态响应性能与电枢电流约束的双重核心需求,设计转速‑电流双闭环调速控制方案,并以单闭环调速系统为对照,在 MATLAB/Simulink 与 Simscape Electrical 仿真环境中完成建模与对比分析。电流环、转速环分别按照典型 I 型、典型 II 型系统完成工程参数整定,PWM 功率变换器采用小时间常数一阶惯性环节等效建模。仿真实验覆盖额定起动、转速给定阶跃切换、反馈通路 + 5% 参数摄动三类典型工况。实验结果表明:双闭环系统可将起动峰值电流由 577.3 A 有效抑制至 182.9 A,电流峰值下降约 3.16 倍,满足 λ・I_N=204 A 的过流保护约束;单闭环系统响应速度更快,但起动电流达到额定值的 4.24 倍。电流环独立测试响应超调量为 4.79%,符合工程设计指标。反馈通路摄动主要恶化系统稳态控制精度,单、双闭环系统静差恶化量级相近。研究证明,双闭环调速结构以牺牲部分转速响应快速性为代价,实现了起动电流的精准限幅约束,是兼顾系统动态性能与电气安全的工程化优选方案。
关键词 :直流电动机;双闭环调速;典型 II 型系统;Simulink 仿真;反馈摄动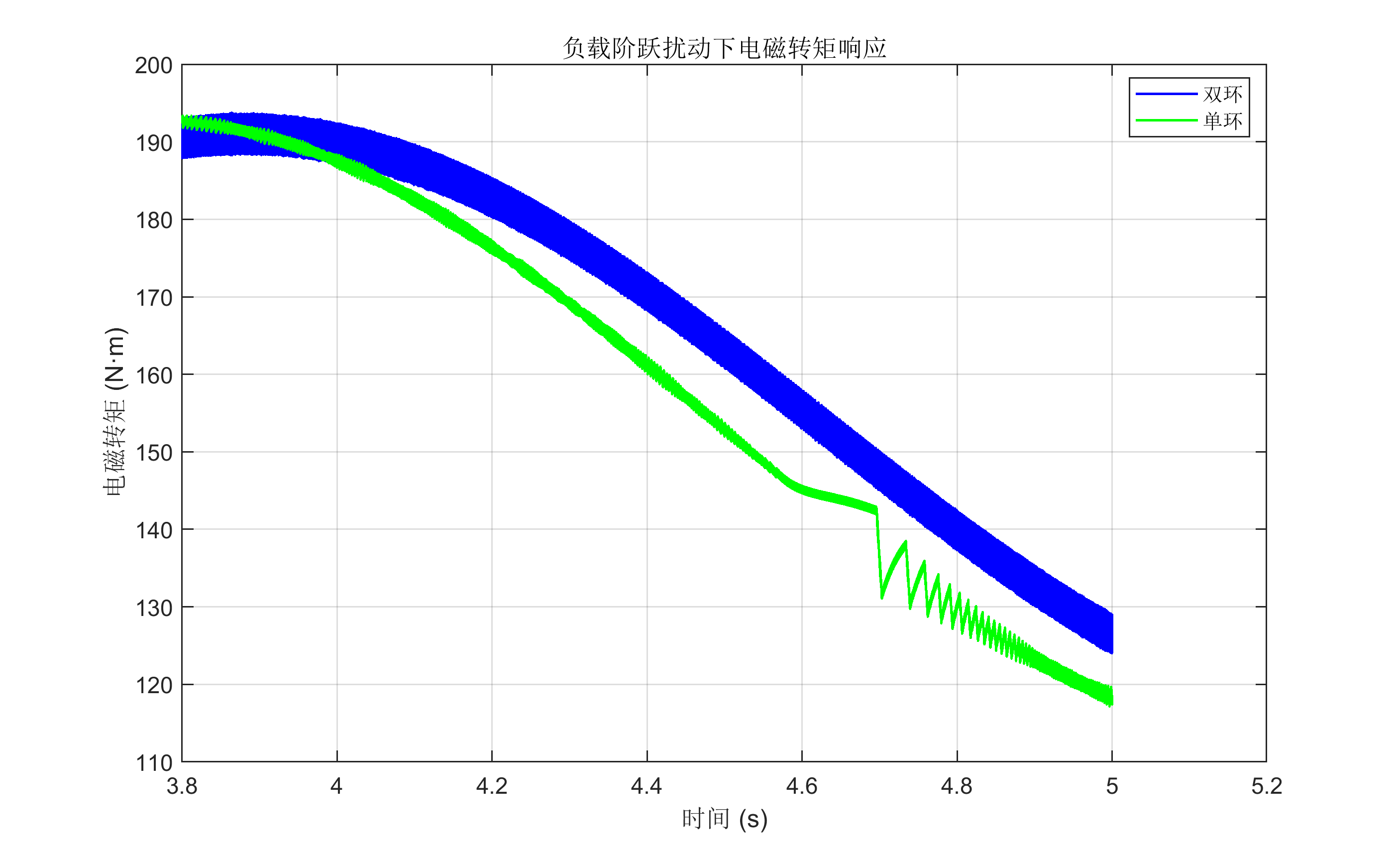
1 引言
直流电动机具备转矩电流近似线性关系、调速范围宽广、动态响应迅速等优势,长期在轧机传动、矿用提升设备、卷绕张力控制系统等工业场景中广泛应用。其调速设计存在核心矛盾:起动阶段需快速建立目标转速,但电枢回路电感较小,极易产生剧烈电流冲击,过流会导致电机换向性能恶化,甚至烧毁绕组与功率器件。单闭环转速控制系统结构简单、易于实现,却无法同时兼顾快速响应与可靠的电流限幅保护。
工程领域普遍采用转速外环 + 电流内环的双闭环级联控制结构。电流内环可将电枢电流严格限制在 λ・I_N 安全范围内,转速外环负责消除稳态转速静差,双环均按照典型系统完成工程整定,能够在牺牲少量速度响应性能的前提下,大幅提升电机起动运行的安全性。但工程化整定的理论假设、PWM 变换器等效惯性近似处理、反馈通路检测精度等因素,会导致仿真结果与理论分析存在偏差。
为定量评估上述偏差,本文搭建额定参数下单闭环系统、双闭环系统及独立电流环仿真模型,在统一平台下对比起动响应、抗扰动特性与反馈鲁棒性,通过可复现脚本流程输出量化性能指标,明确双闭环结构的真实性能边界,识别其相对单环系统的优势区间与性能代价,为调速系统方案选型提供数据支撑。
2 研究方法
2.1 被控对象数学模型
电动机额定参数:额定电压 220 V,额定电流 136 A,额定转速 1460 rpm,电枢电阻 0.5 Ω,电枢电感 15 mH,飞轮矩 22.5 N・m²,过电流倍数 λ=1.5。由额定参数推导核心系数:反电势系数\(C_e=0.1041\ \mathrm{V·min/rev}\),转矩系数\(C_m=0.9942\ \mathrm{N·m/A}\),电磁时间常数\(T_l=0.030\ \mathrm{s}\),机电时间常数\(T_m=0.290\ \mathrm{s}\)。
电机本体采用 Simscape Electrical 中 DC Machine 模块搭建,电枢与励磁端口由可控电源驱动,可直接采集电枢电流、转速、电磁转矩信号。电枢回路电压平衡方程:\(U_d = R i_d + L \frac{di_d}{dt} + C_e n\)机械运动方程:\(T_e - T_L = \frac{GD^2}{375} \frac{dn}{dt}\)式中:\(U_d\)为电枢电压,\(i_d\)为电枢电流,n为转速,\(T_e=C_m i_d\)为电磁转矩,\(T_L\)为负载转矩,\(GD^2\)为飞轮矩。
PWM 变换器等效模型:增益\(K_s=40\),等效时间常数\(T_s=1.67\ \mathrm{ms}\)的一阶惯性环节,通过与三角载波比较驱动 H 桥逆变电路。
2.2 调节器工程整定
-
电流环(ACR) 按典型 I 型系统整定,对消电枢回路时间常数,开环传递函数:\(W_{op,i}(s) = \frac{K_{op,i}}{s(T_{\sigma i}s+1)}\)其中小时间常数之和\(T_{\sigma i}=T_s+T_{oi}=3.67\ \mathrm{ms}\),电流反馈滤波时间常数\(T_{oi}=2\ \mathrm{ms}\);取阻尼系数 0.5,得\(K_{op,i}≈136\ \mathrm{s^{-1}}\)。PI 参数:\(\tau_i=T_l\),\(K_i≈1.02\);电流调节器输出设置 ±180 饱和限幅环节。
-
转速环(ASR) 按典型 II 型系统整定,中频带宽\(h=5\),小时间常数之和\(T_{\sigma n}=17.3\ \mathrm{ms}\),开环传递函数:\(W_{op,n}(s) = \frac{K_{op,n}(\tau_n s+1)}{s^2(T_{\sigma n}s+1)}\)由二阶最佳整定规则:\(\tau_n=h T_{\sigma n}\),\(K_{op,n}=\frac{h+1}{2h^2 T_{\sigma n}^2}\)。反馈参数:转速反馈系数\(\alpha=0.007\ \mathrm{V/rpm}\),电流反馈系数\(\beta=0.05\ \mathrm{V/A}\),转速反馈滤波\(T_{on}=10\ \mathrm{ms}\);转速调节器输出限幅作为电流给定,实现起动电流钳位控制。
2.3 仿真方案设计
仿真软件:MATLAB/Simulink R2024b;求解器:ode23tb 变步长,最大步长 1 ms。构建三类模型:单闭环调速系统、双闭环调速系统、独立电流环测试系统。典型仿真工况:
- \(t∈0,3\ \mathrm{s}\):额定起动工况,转速给定 1460 rpm;
- \(t∈3,4\ \mathrm{s}\):转速给定阶跃切换至 500 rpm;
- \(t≥4\ \mathrm{s}\):投入负载转矩扰动;
- 反馈摄动工况:保持其余参数不变,转速反馈系数\(\alpha\)、电流反馈系数\(\beta\)同时增大 5%,对比分析反馈精度对系统超调量与稳态误差的影响。
3 仿真结果
-
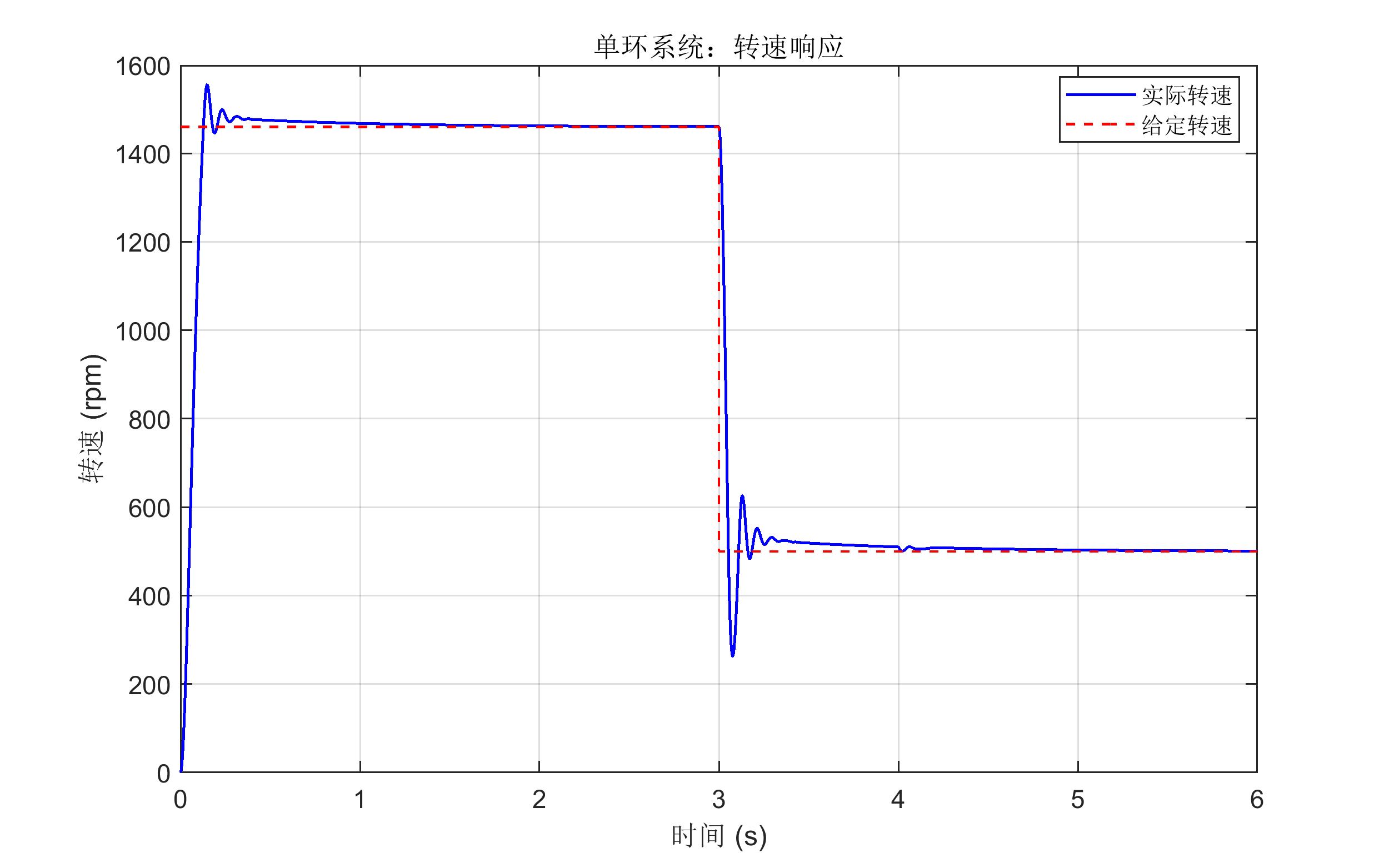
额定起动动态响应对比双闭环系统:转速平稳上升,超调量 5.50%,上升时间 0.391 s,调节时间 1.967 s(±2% 误差带),起动稳态误差 8.34 rpm;单闭环系统:超调量 6.54%,上升时间 0.089 s,调节时间 0.247 s,稳态误差 0.90 rpm。单环转速响应快速性优于双环,但付出了严重的过流代价。
-
电枢起动电流特性 双闭环系统:起动峰值电流 182.9 A,低于 λ・I_N=204 A 安全阈值,电磁转矩峰值 301.7 N・m;起动阶段电流稳定钳位在限值附近,转速呈近似恒加速度上升,实现典型恒流起动。单闭环系统:起动峰值电流 577.3 A,达到额定电流的 4.24 倍,电磁转矩峰值 952.6 N・m,存在换向恶化、机械损伤风险。双闭环相较单环峰值电流降低 3.16 倍,电流限幅效果显著。
-
独立电流环测试电流给定 0→136 A 阶跃响应:超调量 4.79%,上升时间 4.2 ms,稳态误差 - 1.32 A(约 1% 额定值),满足典型 I 型系统≤5% 超调量的工程指标,验证了整定参数的有效性。
-
阶跃切换与负载扰动响应转速 1460 rpm→500 rpm 阶跃切换:单闭环稳态误差 13.98 rpm,1 s 内未稳定至 ±2% 误差带;双闭环系统电流重新进入限幅,转矩平稳回落,无负向过冲。负载投入后,双闭环转矩响应平滑,转速快速回升。
-
反馈通路 + 5% 摄动影响双闭环:起动超调量由 5.50% 降至 0.35%,稳态误差由 8.34 rpm 变为 - 61.74 rpm;单闭环:起动超调量由 6.54% 降至 2.11%,稳态误差由 0.90 rpm 变为 - 68.68 rpm。两类系统稳态误差恶化量级相近,反馈精度直接决定系统静差,双环结构无明显稳态鲁棒优势。
4 讨论
仿真结果明确了双闭环调速系统的工程性能定位:其转速响应速度低于单闭环系统,这是电流内环主动限幅、延长起动过程的必然结果 ------ 电流被钳位在安全值期间,转速环饱和输出,电机恒加速起动,响应速度低于无电流约束的单环系统。而单环系统的快速响应建立在危险的过流冲击之上,不具备工程实用性。
双闭环结构的核心价值在于精准的起动电流约束,保护电机与功率变换器免受过流损坏,这一优势通过 3.16 倍的峰值电流差值得到直观验证。同时,独立电流环 4.79% 的超调量与 4.2 ms 的上升时间,证明典型 I 型系统工程整定方法可靠有效。
反馈摄动实验给出重要工程警示:双闭环结构不具备反馈误差的固有鲁棒性。反馈系数失真会导致控制器检测信号偏差,系统以反向静差进行补偿,单、双环系统恶化趋势一致。工程应用中,必须独立设计反馈通路的标定方案与温漂抑制措施,仅依靠控制环路结构无法补偿传感链路误差。
本研究存在一定局限性:未考虑电机参数大范围变化、磁链非线性特性、逆变器死区效应、电流断续工况等;后续可扩展系统鲁棒性分析、先进控制策略与传统 PI 控制的对比研究。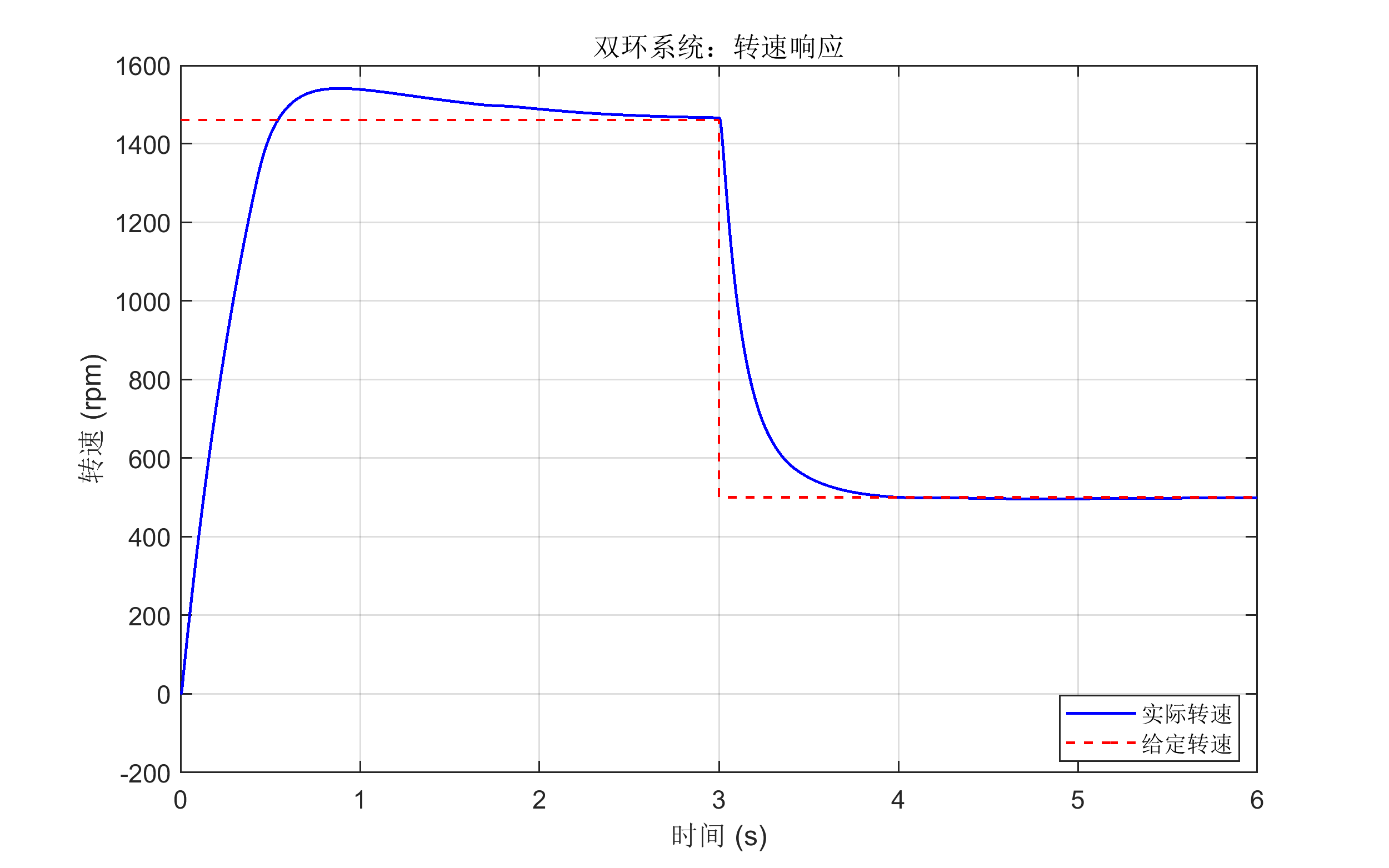
5 结论
本文搭建了直流电动机双闭环调速系统可复现仿真平台,实验结果表明:双闭环结构以牺牲转速响应快速性为代价,将起动峰值电流抑制为单环系统的 1/3.16,满足过流保护约束,是兼顾动态性能与电气安全的工程化优选方案。电流环 4.79% 的响应超调量验证了工程整定方法的有效性,反馈摄动下系统静差的恶化趋势,印证了反馈通路精度对调速系统稳态性能的关键作用。