这个算法利用点与点之间的连线关系(拓扑网络)来剔除内部杂波。内部干扰点的特征是:它们与周围点的连接是短小、杂乱、蜘蛛网状的;而外轮廓点的连接是长距离、大跨度、形成闭环的。
核心逻辑:
我们将点连接成网,然后用 Scale 参数作为"剪刀",剪断太短的线(局部杂波),保留能形成大环的线(外轮廓)。
算法步骤:
- 建网:对所有特征点进行 Delaunay 三角剖分,得到一个拓扑网络。
计算边长:计算网络中所有边的长度。
拓扑剪枝(核心):
遍历所有边,如果边长L>Scale,保留该边;如果 L<Scale,剪断该边。
注意:内部杂乱点之间的距离通常很短,它们的连接会被全部剪断,变成"孤岛"。 - 连通域分析:
剪枝后,寻找最大连通子图(或者形成闭环的子图)。外轮廓点因为跨距大,往往能连成一个大环。
剔除掉度数为0的孤立点(即内部被剪断的杂波点)。
骨架重采样(可选):如果抽稀后外轮廓点仍然太密,可以在保留的大环上进行等距采样。
打个比方:
这就像修剪灌木丛。Scale 是剪刀的尺寸。外轮廓是粗壮的藤蔓(间距大,剪不断),内部杂草是细小的枝桠(间距小,一剪子下去全断)。剪完之后,抖一抖(剔除孤立点),杂草掉光,只剩藤蔓骨架。
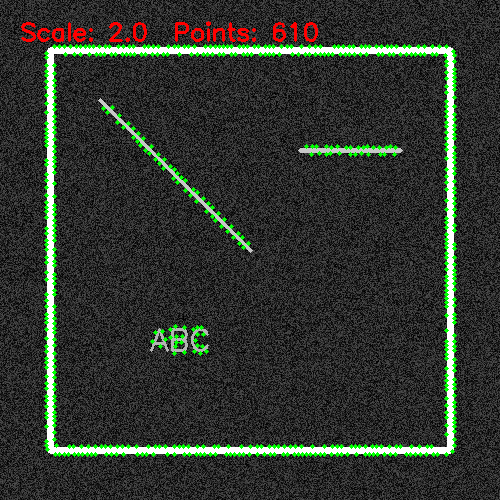
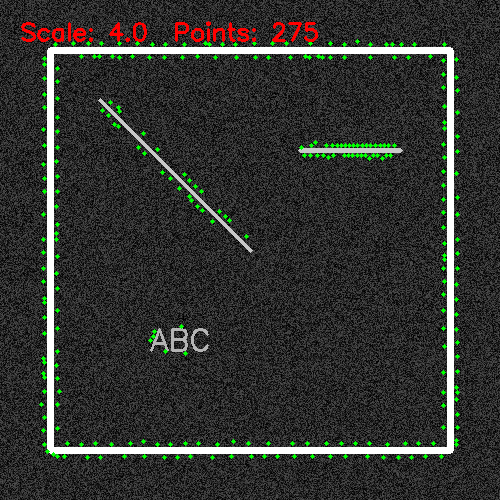
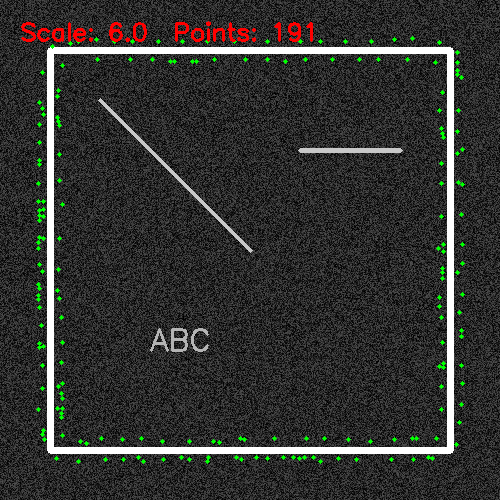
效果图
代码
import cv2
import numpy as np
from scipy.spatial import Delaunay
from collections import deque
def smart_feature_thinning_v3(img, scale=1.0, base_radius=2, contour_protect_radius=3, grad_threshold=30):
"""
V3: Delaunay 拓扑图割法 (彻底抛弃Canny,纯粹基于点空间关系的拓扑抽稀)
参数:
img: 输入灰度图
scale: 抽稀尺度 (1.0 - 10.0),控制拓扑剪刀的阈值
base_radius: 内部点基础抑制半径
contour_protect_radius: 骨架保护半径
grad_threshold: 基础梯度阈值
"""
# 1. 尺度空间高斯模糊 (保留,依然非常有助于源头压制高频杂波)
sigma = max(0.1, scale * 1.5)
ksize = int(sigma * 6) | 1
blurred = cv2.GaussianBlur(img, (ksize, ksize), sigmaX=sigma, sigmaY=sigma)
# 2. 计算梯度
grad_x = cv2.Sobel(blurred, cv2.CV_32F, 1, 0, ksize=3)
grad_y = cv2.Sobel(blurred, cv2.CV_32F, 0, 1, ksize=3)
grad_mag = np.sqrt(grad_x**2 + grad_y**2)
# 3. 提取候选点 (局部极大值)
mask = (grad_mag > grad_threshold)
local_max_mask = np.zeros_like(mask)
for i in range(1, img.shape[0]-1):
for j in range(1, img.shape[1]-1):
region = grad_mag[i-1:i+2, j-1:j+2]
if grad_mag[i, j] == np.max(region) and mask[i, j]:
local_max_mask[i, j] = True
ys, xs = np.where(local_max_mask)
scores = grad_mag[ys, xs]
# 按照得分从高到低排序
order = np.argsort(-scores)
xs, ys, scores = xs[order], ys[order], scores[order]
# 点数太少无法构建拓扑,直接返回
if len(xs) < 3:
return list(zip(xs, ys))
# ================= 【核心重写:Delaunay 拓扑图割】 =================
points = np.column_stack((xs, ys))
# 4. 构建 Delaunay 三角剖分
tri = Delaunay(points)
# 提取所有唯一的边
edges = set()
for simplex in tri.simplices:
edges.add(tuple(sorted((simplex[0], simplex[1]))))
edges.add(tuple(sorted((simplex[1], simplex[2]))))
edges.add(tuple(sorted((simplex[0], simplex[2]))))
# 5. 拓扑剪枝 (图割)
# Scale 越大,短边阈值越长,内部杂波网状连接被剪得越碎
min_edge_len = scale * 2.0
# 跨越图像空洞的内部对角线通常很长,也要剪断,防止内部点连到外轮廓上
max_edge_len = min(img.shape[0], img.shape[1]) * 0.15
adj = {i: [] for i in range(len(points))}
for i, j in edges:
dist = np.linalg.norm(points[i] - points[j])
# 只保留长度适中的 "结构边" (骨架边)
if min_edge_len <= dist <= max_edge_len:
adj[i].append(j)
adj[j].append(i)
# 6. 连通域分析 (BFS寻岛)
# 剪枝后,内部杂波变成孤立点或极小簇,外轮廓依然是大簇
visited = [False] * len(points)
is_structure = [False] * len(points)
min_cluster_size = 3 # 至少3个点相连,才算拓扑骨架/外轮廓
for i in range(len(points)):
if not visited[i]:
cluster = []
queue = deque([i])
visited[i] = True
while queue:
curr = queue.popleft()
cluster.append(curr)
for neighbor in adj[curr]:
if not visited[neighbor]:
visited[neighbor] = True
queue.append(neighbor)
# 大簇保留,小簇和孤立点标记为非结构(杂波)
if len(cluster) >= min_cluster_size:
for idx in cluster:
is_structure[idx] = True
# ==================================================================
# 7. 拓扑感知非对称 NMS
keep_points = []
internal_radius = base_radius + int(scale * 2.5)
suppressed = np.zeros(img.shape[:2], dtype=bool)
for i in range(len(xs)):
x, y = xs[i], ys[i]
if suppressed[y, x]:
continue
keep_points.append((x, y))
# 判断身份:由 Delaunay 拓扑图割决定
if is_structure[i]:
r = contour_protect_radius # 属于拓扑骨架:小半径保护
else:
r = internal_radius # 属于孤立杂波:大范围清洗
# 标记抑制区域
y_top = max(0, y - r)
y_bot = min(img.shape[0], y + r + 1)
x_left = max(0, x - r)
x_right = min(img.shape[1], x + r + 1)
suppressed[y_top:y_bot, x_left:x_right] = True
return keep_points
# ================= 测试与可视化代码 =================
def on_trackbar(val):
scale_val = val / 10.0
if scale_val < 0.1: scale_val = 0.1
points = smart_feature_thinning_v3(img_gray, scale=scale_val,
base_radius=2, contour_protect_radius=3,
grad_threshold=30)
display = img_color.copy()
for (x, y) in points:
cv2.circle(display, (x, y), 2, (0, 255, 0), -1)
cv2.putText(display, f"Scale: {scale_val:.1f} Points: {len(points)}",
(20, 40), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0, 0, 255), 2)
cv2.imshow("V3 Delaunay Topology Cut Thinning", display)
# 生成挑战性测试图
img_color = np.zeros((500, 500, 3), dtype=np.uint8)
img_gray = np.zeros((500, 500), dtype=np.uint8)
cv2.rectangle(img_gray, (50, 50), (450, 450), 255, 5)
cv2.line(img_gray, (100, 100), (250, 250), 200, 3)
cv2.line(img_gray, (300, 150), (400, 150), 200, 3)
cv2.putText(img_gray, "ABC", (150, 350), cv2.FONT_HERSHEY_SIMPLEX, 1, 180, 2)
noise = np.random.randint(0, 80, (500, 500), dtype=np.uint8)
img_gray = np.maximum(img_gray, noise)
# 如果有真实图片,取消下面这行注释
# img_gray = cv2.imread("model.jpg", cv2.IMREAD_GRAYSCALE)
# img_color = cv2.cvtColor(img_gray, cv2.COLOR_GRAY2BGR)
if len(img_gray.shape) == 2:
img_color = cv2.cvtColor(img_gray, cv2.COLOR_GRAY2BGR)
cv2.namedWindow("V3 Delaunay Topology Cut Thinning")
cv2.createTrackbar("Scale (1-100)", "V3 Delaunay Topology Cut Thinning", 10, 100, on_trackbar)
on_trackbar(10)
cv2.waitKey(0)
cv2.destroyAllWindows()