前言
- 最近项目中需要在
jeston nano上的ubuntu 18.04 LTS的ros1 melodic与RDKX5上的ubuntu 22.04 LTS的ros2 humble进行跨网络通讯。 - 本文将提供一种基于
rosbridge-websocket实现跨网络的ROS1与ROS2通讯。(c++实现) - 注:本文说明的方法同样使用与
ros与非ros之间的通讯 - 本期只放代码,下期讲解具体实现内容
1 介绍与测试
1-1 介绍
1-1-1 rosbridge
rosbridge是 ROS 生态中的一个通信桥接工具,它能够将 ROS 中的 Topic、Service、Parameter 等接口转换为标准的 JSON 消息,并通过网络进行传输。- 在传统 ROS 通信中,节点之间依赖 ROS Master(ROS1)或 DDS(ROS2)进行发现与通信。当不同版本的 ROS(例如 ROS1 Melodic 与 ROS2 Humble)需要跨机器通信时,往往需要使用
ros1_bridge、DDS 配置或者自定义网络协议,配置较为复杂。 rosbridge则提供了一种更加通用的解决方案:- ROS 节点负责发布和订阅话题;
- rosbridge 将 ROS 消息转换为 JSON 格式;
- 外部程序通过 WebSocket 与 rosbridge 进行通信;
- 无需关心 ROS 版本差异。
- 其整体架构如下:
bash
ROS Topic
│
▼
rosbridge_server
│
JSON
│
WebSocket
│
▼
外部程序- 因此,只要能够连接到 rosbridge 提供的 WebSocket 服务,无论是 Python、C++、JavaScript、Unity 还是 ROS2 节点,都可以访问 ROS1 中的话题数据。
1-1-2 WebSocket
- WebSocket 是一种基于 TCP 的全双工网络通信协议。
- 与传统 HTTP 请求-响应模式不同,WebSocket 在建立连接后,客户端与服务器可以持续保持连接,并能够双向主动发送数据。
- 其特点包括:
- 长连接通信;
- 双向实时传输;
- 延迟低;
- 开销小;
- 支持跨平台和跨语言开发。
- 在 rosbridge 中:
- rosbridge_server 作为 WebSocket Server;
- 外部程序作为 WebSocket Client;
- ROS 消息会被封装为 JSON 数据进行传输。
- 例如,一个 ROS Topic 消息可能会被转换为:
json
{
"op":"publish",
"topic":"/odom",
"msg":{
"pose":{
"pose":{
"position":{
"x":1.2,
"y":0.8,
"z":0.0
}
}
}
}
}- 客户端只需要解析 JSON,即可获得对应的话题数据。
1-2 测试
- 我们要做的测试如下:
ROS1端启动rosbridge-server服务,并启动一些话题发布ROS2端启动一个简单的websocket-client订阅对应的话题
- 测试前确保:两边机器连接在同一个局域网下且可以互相
ping通彼此的ip(可以通过ifconfig查看自己的ip)
1-2-1 ROS1端
- 安装
rosbridge-server
bash
sudo apt install ros-melodic-rosbridge-server- 启动:
rosbridge-server
bash
source /opt/ros/melodic/setup.bash
roslaunch rosbridge_server rosbridge_websocket.launch
- 可以看到
websocket服务被启用在端口9090
1-2-2 ROS2端
- 我们使用
python的websocket进行测试,
bash
pip install websocket-client- 我们简单写一个话题订阅(确保你的
ROS1端确实在发送)
python
from websocket import create_connection
ws = create_connection("ws://192.168.10.170:9090")
ws.send('{"op":"subscribe","topic":"/odom"}')
while True:
print(ws.recv())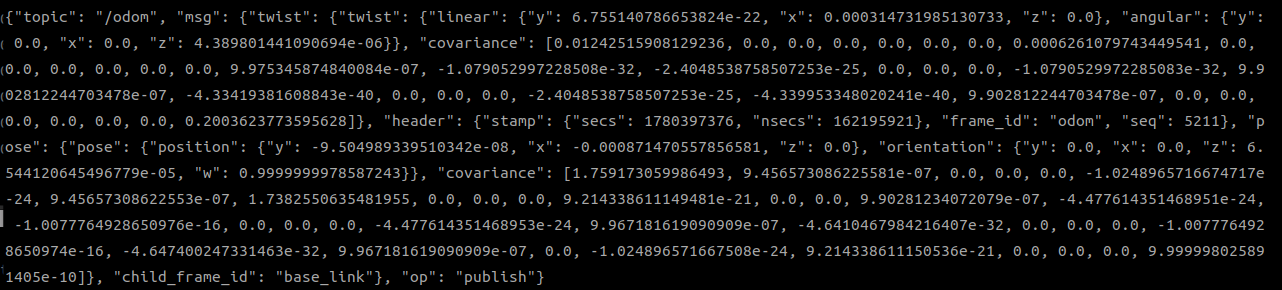
- 可以看到我们订阅到了
ROS1端发送的odom数据,为json格式
- 同时我们也可以写一个发布
python
from websocket import create_connection
import json
import time
ws = create_connection("ws://192.168.10.170:9090")
# 声明话题
ws.send(json.dumps({
"op": "advertise",
"topic": "/test",
"type": "std_msgs/String"
}))
count = 0
while True:
ws.send(json.dumps({
"op": "publish",
"topic": "/test",
"msg": {
"data": f"hello {count}"
}
}))
print(f"publish: hello {count}")
count += 1
time.sleep(1)- 执行期间确保
ROS1端的rosbridge-websocket的服务端是开着的 - 可以看到
ROS1端接收到了python发来的话题通讯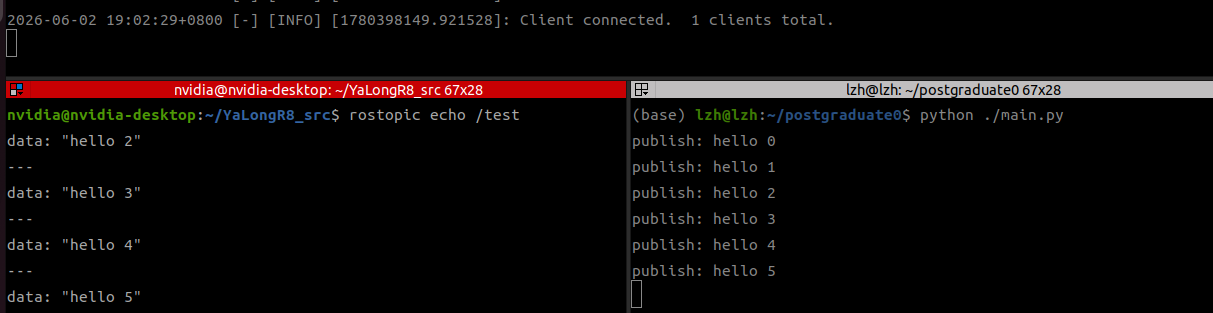
2 C++实现
2-1 API说明
2-1-1 话题发布
- 声明发布者
json
{
"op": "advertise",
"topic": "/test",
"type": "std_msgs/String",
"id": "publisher_1",
"latch": false,
"queue_size": 100
}- 参数说明:
| 参数 | 类型 | 说明 |
|---|---|---|
| op | string | 固定为 advertise |
| topic | string | Topic 名称 |
| type | string | ROS 消息类型 |
| id | string | 可选,请求唯一标识 |
| latch | bool | 是否启用 latched topic |
| queue_size | int | 发布队列大小 |
- 发布话题
json
{
"op": "publish",
"topic": "/test",
"id": "publish_1",
"msg": {
"data": "hello"
}
}- 取消发布
json
{
"op": "unadvertise",
"topic": "/test",
"id": "publisher_1"
}2-1-2 话题订阅
- 订阅话题
json
{
"op": "subscribe",
"topic": "/odom",
"id": "subscriber_1",
"type": "nav_msgs/Odometry",
"throttle_rate": 100,
"queue_length": 1,
"fragment_size": 0,
"compression": "none"
}- 参数说明:
| 参数 | 类型 | 说明 |
|---|---|---|
| op | string | 固定为 subscribe |
| topic | string | Topic 名称 |
| id | string | 可选,请求唯一标识 |
| type | string | 可选,消息类型 |
| throttle_rate | int | 限流周期(ms),100=10Hz |
| queue_length | int | 缓冲队列长度 |
| fragment_size | int | 消息分片大小(字节) |
| compression | string | 压缩方式 |
- compression 可选值:
text
none
png
cbor
cbor-raw- 接收到的格式
json
{
"op": "publish",
"topic": "/odom",
"msg": {
...
}
}- 取消订阅
json
{
"op": "unsubscribe",
"topic": "/odom",
"id": "subscriber_1"
}2-2 安装必要依赖库
bash
sudo apt install libwebsocketpp-dev
sudo apt install nlohmann-json3-dev
sudo apt install libboost-all-dev- 项目结构如下:
bash
websocket_client_ros2
├── CMakeLists.txt
├── include
│ └── websocket_client_ros2
│ ├── RosbridgeClient.hpp
│ ├── RosbridgeParser.hpp
│ ├── RosWsBridgeNode.hpp
│ ├── TopicDispatcher.hpp
│ ├── TopicPublishBase
│ │ ├── OdomPublish.hpp
│ │ └── TopicPublishBase.hpp
│ └── TopicSubscribeBase
│ ├── OdomSubscribe.hpp
│ └── TopicSubscribeBase.hpp
├── package.xml
├── scripts
│ └── main.py
└── src
├── main.cpp
├── RosbridgeClient.cpp
├── RosbridgeParser.cpp
└── TopicDispatcher.cpp2-3 核心结构
2-3-1 总体架构
- 本系统采用"协议解耦 + 话题分发 + 插件式Bridge扩展"的设计方式,实现 ROS1 ↔ ROS2 通过 rosbridge-websocket 的双向通信。
- 整体结构如下:
bash
ROS2 Topic
│
┌────────▼────────┐
│ TopicPublish │ (ROS2 → WebSocket)
└────────┬────────┘
│
▼
RosbridgeClient
(WebSocket通信层)
│
▼
JSON Message
│
┌────────▼────────┐
│ RosbridgeParser │ (JSON解析/封装)
└────────┬────────┘
│
▼
┌─────────────────┐
│ TopicDispatcher │ (按topic分发)
└────────┬────────┘
│
┌────────▼────────┐
│ TopicSubscribe │ (WebSocket → ROS2)
└────────┬────────┘
│
▼
ROS2 Topic2-3-2 各模块职责划分
2-3-2-1 RosbridgeClient(通信层)
- 负责:
- WebSocket 连接管理
- JSON 字符串收发
- 连接状态回调
- 特点:
- 不关心 ROS
- 不解析 JSON
- 只做"TCP级别的数据通道"
2-3-2-2 RosbridgeParser(协议层)
- 负责:
- JSON ↔ ROSBridge协议转换
- 过滤 publish / subscribe
- 构造标准 rosbridge message
- 核心能力:
- encodeSubscribe()
- encodePublish()
- parse()
2-3-2-3 TopicDispatcher(路由层)
- 负责:
- 根据 topic 名称分发消息
- 管理 callback registry
- 本质:把 /odom /cmd_vel /imu 分流到不同 handler
cpp
std::unordered_map<std::string, callback>2-3-2-4 TopicPublishBase(ROS2 → ROS1)
- 负责:
- ROS2 subscribe
- 转 JSON
- 发 WebSocket
- 特点:
- ROS2 → WebSocket 单向桥
2-3-2-5 TopicSubscribeBase(ROS1 → ROS2)
- 负责:
- dispatcher 注册 handler
- JSON → ROS2 msg
- ROS2 publish
- 特点:
- WebSocket → ROS2 单向桥
2-3-2-6 RosWsBridgeNode(系统入口)
- 负责:
- 初始化 ROS2 Node
- 初始化 WebSocket
- 注册所有 bridge topic
- 统一生命周期管理
- 特点:
- "不做解析,只做组装"
2-4 核心实现
RosbridgeClient.hpp
cpp
#pragma once
#include <functional>
#include <string>
#include <websocketpp/config/asio_no_tls_client.hpp>
#include <websocketpp/client.hpp>
class RosbridgeClient
{
public:
using RawCallback = std::function<void(const std::string&)>;
using ConnectedCallback = std::function<void()>;
RosbridgeClient();
bool connect(const std::string& uri);
void run();
void send(const std::string& json);
void setRawCallback(RawCallback cb);
void setConnectedCallback(ConnectedCallback cb);
private:
using WsClient =
websocketpp::client<websocketpp::config::asio_client>;
void onOpen(websocketpp::connection_hdl hdl);
void onMessage(websocketpp::connection_hdl hdl, WsClient::message_ptr msg);
private:
WsClient client_;
websocketpp::connection_hdl hdl_;
RawCallback raw_cb_;
ConnectedCallback connected_cb_;
};RosbridgeClient.cpp
cpp
#include "../include/websocket_client_ros2/RosbridgeClient.hpp"
#include <iostream>
RosbridgeClient::RosbridgeClient()
{
client_.clear_access_channels(websocketpp::log::alevel::all);
client_.init_asio();
client_.set_open_handler([this](auto hdl)
{
onOpen(hdl);
});
client_.set_message_handler([this](auto, auto msg)
{
if(raw_cb_)
raw_cb_(msg->get_payload());
});
}
bool RosbridgeClient::connect(const std::string& uri)
{
websocketpp::lib::error_code ec;
auto con = client_.get_connection(uri, ec);
if(ec)
{
std::cerr << ec.message() << std::endl;
return false;
}
client_.connect(con);
std::thread([this]()
{
client_.run();
}).detach();
return true;
}
void RosbridgeClient::run()
{
client_.run();
}
void RosbridgeClient::send(const std::string& json)
{
websocketpp::lib::error_code ec;
client_.send(
hdl_,
json,
websocketpp::frame::opcode::text,
ec);
if(ec)
std::cerr << "[send error] " << ec.message() << std::endl;
}
void RosbridgeClient::setRawCallback(RawCallback cb)
{
raw_cb_ = std::move(cb);
}
void RosbridgeClient::setConnectedCallback(ConnectedCallback cb)
{
connected_cb_ = std::move(cb);
}
void RosbridgeClient::onOpen(websocketpp::connection_hdl hdl)
{
hdl_ = hdl;
std::cout << "Connected" << std::endl;
if(connected_cb_)
connected_cb_();
}
void RosbridgeClient::onMessage(websocketpp::connection_hdl, WsClient::message_ptr msg)
{
if(raw_cb_)
raw_cb_(msg->get_payload());
}RosbridgeParser.hpp
cpp
#pragma once
#include <functional>
#include <string>
#include <nlohmann/json.hpp>
class RosbridgeParser
{
public:
struct TopicMessage
{
std::string topic;
nlohmann::json msg;
};
using MsgCallback = std::function<void(const TopicMessage&)>;
void setCallback(MsgCallback cb);
void parse(const std::string& raw);
std::string encodeSubscribe(const std::string& topic);
std::string encodePublish(const TopicMessage& msg);
private:
MsgCallback cb_;
};RosbridgeParser.cpp
cpp
#include "../include/websocket_client_ros2/RosbridgeParser.hpp"
void RosbridgeParser::setCallback(MsgCallback cb)
{
cb_ = std::move(cb);
}
void RosbridgeParser::parse(const std::string& raw)
{
try
{
auto j = nlohmann::json::parse(raw);
if(!j.contains("op"))
return;
if(j["op"] != "publish")
return;
TopicMessage tm;
tm.topic = j["topic"];
tm.msg = j["msg"];
if(cb_)
cb_(tm);
}
catch(...)
{
}
}
std::string RosbridgeParser::encodeSubscribe(const std::string& topic)
{
nlohmann::json j;
j["op"] = "subscribe";
j["topic"] = topic;
return j.dump();
}
std::string RosbridgeParser::encodePublish(const TopicMessage& msg)
{
nlohmann::json j;
j["op"] = "publish";
j["topic"] = msg.topic;
j["msg"] = msg.msg;
return j.dump();
}TopicPublishBase.hpp
cpp
#pragma once
#include <rclcpp/rclcpp.hpp>
#include "../RosbridgeParser.hpp"
#include <memory>
class TopicPublishBase
{
public:
TopicPublishBase(rclcpp::Node* node,
RosbridgeParser* parser,
RosbridgeClient* ws)
: node_(node), parser_(parser), ws_(ws) {}
virtual ~TopicPublishBase() = default;
protected:
rclcpp::Node* node_;
RosbridgeParser* parser_;
RosbridgeClient* ws_;
};TopicSubscribeBase.hpp
cpp
#pragma once
#include <rclcpp/rclcpp.hpp>
#include "../RosbridgeParser.hpp"
#include <memory>
class TopicSubscribeBase
{
public:
TopicSubscribeBase(rclcpp::Node* node, RosbridgeParser* parser)
: node_(node), parser_(parser)
{}
virtual ~TopicSubscribeBase() = default;
// 注册 Dispatcher handler
virtual void registerHandler() = 0;
protected:
rclcpp::Node* node_;
RosbridgeParser* parser_;
};2-5 测试实现
OdomPublish.hpp
cpp
#pragma once
#include <nav_msgs/msg/odometry.hpp>
#include "./TopicPublishBase.hpp"
#include "../TopicDispatcher.hpp"
class OdomPublish : public TopicPublishBase
{
public:
OdomPublish(rclcpp::Node* node,
RosbridgeParser* parser,
RosbridgeClient* ws)
: TopicPublishBase(node, parser, ws)
{
sub_ = node_->create_subscription<nav_msgs::msg::Odometry>(
"/odom_ros2", 10,
std::bind(&OdomPublish::callback, this, std::placeholders::_1));
}
private:
void callback(const nav_msgs::msg::Odometry::SharedPtr msg)
{
RosbridgeParser::TopicMessage tm;
tm.topic = "/odom_ros2";
tm.msg["pose"]["pose"]["position"]["x"] = msg->pose.pose.position.x;
tm.msg["pose"]["pose"]["position"]["y"] = msg->pose.pose.position.y;
tm.msg["pose"]["pose"]["position"]["z"] = msg->pose.pose.position.z;
ws_->send(parser_->encodePublish(tm));
}
private:
rclcpp::Subscription<nav_msgs::msg::Odometry>::SharedPtr sub_;
};OdomSubscribe.hpp
cpp
#pragma once
#include <nav_msgs/msg/odometry.hpp>
#include "./TopicSubscribeBase.hpp"
#include "../TopicDispatcher.hpp"
class OdomSubscribe : public TopicSubscribeBase
{
public:
OdomSubscribe(rclcpp::Node* node,
RosbridgeParser* parser,
TopicDispatcher* dispatcher,
RosbridgeClient* ws)
: TopicSubscribeBase(node, parser),
dispatcher_(dispatcher),
ws_(ws)
{
pub_ = node_->create_publisher<nav_msgs::msg::Odometry>(
"/odom_ros1", 10);
}
void registerHandler() override
{
dispatcher_->registerHandler("/odom_ros1", [&](const RosbridgeParser::TopicMessage& msg){
handle(msg);
});
// 自动向 WebSocket 发送订阅请求
ws_->send(parser_->encodeSubscribe("/odom_ros1"));
}
private:
void handle(const RosbridgeParser::TopicMessage& msg)
{
nav_msgs::msg::Odometry odom;
odom.pose.pose.position.x = msg.msg["pose"]["pose"]["position"]["x"];
odom.pose.pose.position.y = msg.msg["pose"]["pose"]["position"]["y"];
odom.pose.pose.position.z = msg.msg["pose"]["pose"]["position"]["z"];
pub_->publish(odom);
}
private:
rclcpp::Publisher<nav_msgs::msg::Odometry>::SharedPtr pub_;
TopicDispatcher* dispatcher_;
RosbridgeClient* ws_;
};main.cpp
cpp
#include <rclcpp/rclcpp.hpp>
#include "../include/websocket_client_ros2/RosWsBridgeNode.hpp"
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<RosWsBridgeNode>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}CMakeLists.txt
cpp
cmake_minimum_required(VERSION 3.8)
project(websocket_client_ros2)
set(CMAKE_CXX_STANDARD 17)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(nav_msgs REQUIRED)
find_package(Boost REQUIRED COMPONENTS system thread)
include_directories(
${Boost_INCLUDE_DIRS}
)
add_executable(rosbridge_client
./src/main.cpp
./src/RosbridgeClient.cpp
./src/RosbridgeParser.cpp
./src/TopicDispatcher.cpp
)
ament_target_dependencies(rosbridge_client
rclcpp
nav_msgs
)
target_link_libraries(rosbridge_client
${Boost_LIBRARIES}
pthread
)
install(TARGETS rosbridge_client
DESTINATION lib/${PROJECT_NAME}
)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()2-6 扩展说明
- 在现有的 RosWsBridgeNode + TopicPublishBase / TopicSubscribeBase 框架中,添加新的 ROS2 ↔ ROS1 通信话题非常简单,只需按照以下步骤操作:
- 本节示例采用
/cmd_vel话题,仅作演示,自定义话题替换即可
2-6-1 添加 ROS2 → ROS1 的话题(发布)
- 继承
TopicPublishBase
创建一个新的发布类,例如CmdVelPublish.hpp:
cpp
#pragma once
#include <geometry_msgs/msg/twist.hpp>
#include "./TopicPublishBase.hpp"
class CmdVelPublish : public TopicPublishBase
{
public:
CmdVelPublish(rclcpp::Node* node,
RosbridgeParser* parser,
RosbridgeClient* ws)
: TopicPublishBase(node, parser, ws)
{
sub_ = node_->create_subscription<geometry_msgs::msg::Twist>(
"/cmd_vel_ros2", 10,
std::bind(&CmdVelPublish::callback, this, std::placeholders::_1));
}
private:
void callback(const geometry_msgs::msg::Twist::SharedPtr msg)
{
RosbridgeParser::TopicMessage tm;
tm.topic = "/cmd_vel_ros1";
tm.msg["linear"]["x"] = msg->linear.x;
tm.msg["linear"]["y"] = msg->linear.y;
tm.msg["linear"]["z"] = msg->linear.z;
tm.msg["angular"]["x"] = msg->angular.x;
tm.msg["angular"]["y"] = msg->angular.y;
tm.msg["angular"]["z"] = msg->angular.z;
ws_->send(parser_->encodePublish(tm));
}
private:
rclcpp::Subscription<geometry_msgs::msg::Twist>::SharedPtr sub_;
};- 在
RosWsBridgeNode中注册
在系统入口中创建对象即可:
cpp
auto cmdvel_pub = std::make_shared<CmdVelPublish>(this, &parser_, &ws_);2-6-2 添加 ROS1 → ROS2 的话题(订阅)
- 继承
TopicSubscribeBase
创建一个订阅类,例如CmdVelSubscribe.hpp:
cpp
#pragma once
#include <geometry_msgs/msg/twist.hpp>
#include "./TopicSubscribeBase.hpp"
class CmdVelSubscribe : public TopicSubscribeBase
{
public:
CmdVelSubscribe(rclcpp::Node* node,
RosbridgeParser* parser,
TopicDispatcher* dispatcher,
RosbridgeClient* ws)
: TopicSubscribeBase(node, parser),
dispatcher_(dispatcher),
ws_(ws)
{
pub_ = node_->create_publisher<geometry_msgs::msg::Twist>(
"/cmd_vel_ros2", 10);
}
void registerHandler() override
{
dispatcher_->registerHandler("/cmd_vel_ros1", [&](const RosbridgeParser::TopicMessage& msg){
handle(msg);
});
ws_->send(parser_->encodeSubscribe("/cmd_vel_ros1"));
}
private:
void handle(const RosbridgeParser::TopicMessage& msg)
{
geometry_msgs::msg::Twist twist;
twist.linear.x = msg.msg["linear"]["x"];
twist.linear.y = msg.msg["linear"]["y"];
twist.linear.z = msg.msg["linear"]["z"];
twist.angular.x = msg.msg["angular"]["x"];
twist.angular.y = msg.msg["angular"]["y"];
twist.angular.z = msg.msg["angular"]["z"];
pub_->publish(twist);
}
private:
rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr pub_;
TopicDispatcher* dispatcher_;
RosbridgeClient* ws_;
};- 在
RosWsBridgeNode中注册
在节点初始化时创建对象并调用registerHandler():
cpp
auto cmdvel_sub = std::make_shared<CmdVelSubscribe>(this, &parser_, &dispatcher_, &ws_);cmdvel_sub->registerHandler();3 测试
3-1 全程需要开的内容
ros1端:
bash
roslaunch rosbridge_server rosbridge_websocket.launch
ros2端(请自己创建功能包)
bash
ros2 run websocket_client_ros2 rosbridge_client 
3-2 ros1发布测试
- ros1发布:
bash
rostopic pub /odom_ros1 nav_msgs/Odometry "header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: 'odom'
child_frame_id: 'base_link'
pose:
pose:
position:
x: 1.0
y: 2.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance: [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]" -r 1- 然后在ros2端测试
bash
ros2 topic hz /odom_ros1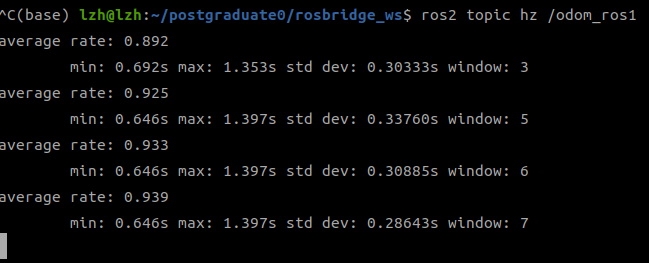
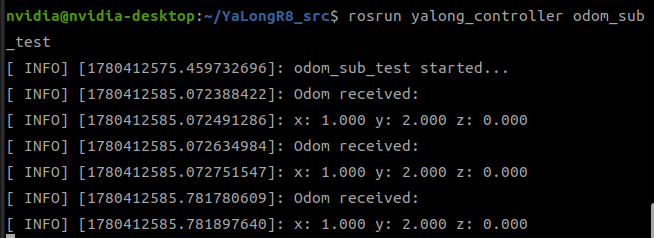
3-3 ros2发布测试
-
由于
rosbridge的特性,ros1接受来自websocket的话题前必须先打开订阅方,否则会出现如下的报错:
-
ros1端测试
cpp
#include <ros/ros.h>
#include <nav_msgs/Odometry.h>
void odomCallback(const nav_msgs::Odometry::ConstPtr& msg)
{
ROS_INFO("Odom received:");
ROS_INFO("x: %.3f y: %.3f z: %.3f",
msg->pose.pose.position.x,
msg->pose.pose.position.y,
msg->pose.pose.position.z);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "odom_sub_test");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe(
"/odom_ros2",
10,
odomCallback);
ROS_INFO("odom_sub_test started...");
ros::spin();
return 0;
}- 然后优先打开订阅方
bash
rosrun yalong_controller odom_s_test- 最后再打开ros2发布
bash
ros2 topic pub -r 1 /odom_ros2 nav_msgs/msg/Odometry \
"{pose: {pose: {position: {x: 1.0, y: 2.0, z: 0.0}, \
orientation: {x: 0.0, y: 0.0, z: 0.0, w: 1.0}}}, \
twist: {twist: {linear: {x: 0.0, y: 0.0, z: 0.0}, \
angular: {x: 0.0, y: 0.0, z: 0.0}}}}"- 测试结果:
小结
- 本文提供了一种基于
rosbridge-websocket实现跨网络的ROS1与ROS2通讯。(c++实现) - 下期我们讲解具体实现
- 如有错误,欢迎提出!
- 感谢观看!!
