1. CDR概述
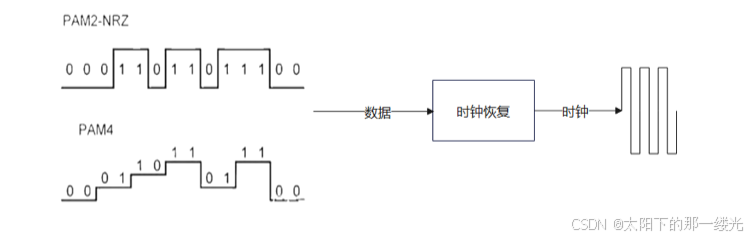
随着5G/数据中心的高速发展,光传输向着更高速率、更低延时演进,这就要求对应的光模块经过传输后尽量减小失真,以便在接收端将信号完整地再生出来。从10G长距到25G,再到50G/200G/400G PMA4,由于光纤传输链路线性/非线性效应,因此需要引入时钟数据恢复技术(CDR:Clock Data Recovery)。
| 代际划分 | 时间区间 | 核心行业发展背景 | CDR 核心技术方案 | 技术核心特点 | 典型商用场景 |
|---|---|---|---|---|---|
| 初代:并行总线时代 | 1960~1990 年 | 1. 并行总线传输为主,多线等长布线难度大,线长偏差导致时钟 / 数据时序偏移(skew),几十 MHz 速率即出现采样错位;2. 多并行引脚 EMI 辐射严重、芯片封装成本高;3. NRZ 码本身不含时钟频率分量,无法直接滤波提取时钟 | 分立元件 PLL 架构,搭配 Hogge 鉴相器、平方环方案 | 全模拟环路设计,仅能通过数据边沿提取相位,集成度低、功耗大、速率上限低 | 低速 PCM 通信、早期光纤传输系统 |
| 第二代:串行 SerDes 普及期 | 1990~2010 年 | 1. 并行总线速率触达物理极限,行业全面转向内嵌时钟的串行传输,仅用差分数据线传输,不再单独走时钟线,CDR 成为 SerDes 必备模块;2. 8b/10b 编码商用,强制保证直流平衡与充足数据跳变沿,为 CDR 提供稳定相位捕捉条件 | 电荷泵 PLL + 全速率 Bang-Bang(BB)CDR 为主流,半速率多相采样方案同步出现 | 非线性鉴相设计,结构精简、易 CMOS 集成,完美适配 2 电平 NRZ 的跳变沿相位提取,环路带宽设计宽松 | PCIe1.0/2.0、千兆光模块、XAUI 接口、10G 以太网 |
| 第三代:高速 NRZ 瓶颈期 | 2010~2018 年 | 1. 以太网从 40G 向 100G 升级、PCIe4.0 16GT/s、56G 背板 NRZ 商用,符号速率持续飙升;2. 高波特率下 PCB 高频损耗、ISI 码间干扰、串扰、随机抖动指数级恶化,接收端眼图急剧收缩,CDR 抖动容限被大幅压缩,单纯模拟 CDR 无法适配高损耗信道 | 模拟 CDR 与 FFE/CTLE/DFE 三大均衡技术深度绑定,接收端先通过均衡修复眼图,再送入 CDR 完成采样 | 保留 2 电平 NRZ 专用 CDR 架构,仅识别高低电平跳变,算法逻辑简单,通过前置均衡补偿信道畸变,适配高损耗长距传输 | PCIe4.0、40G/100G NRZ 以太网、56G 背板互连系统 |
| 第四代:PAM4 时代重构期 | 2018 年至今 | 1. 100G/400G/800G 以太网、PCIe6.0 对带宽需求翻倍,NRZ 继续提升波特率至 64GBaud 以上时,FR4 / 铜缆信道已无法支撑,行业全面落地 PAM4 调制;2. PAM4 1 符号承载 2bit,同波特率带宽翻倍,但 4 电平设计导致相邻电平间距仅为 NRZ 的 1/3,对噪声、抖动敏感度大幅提升,传统模拟 BB-CDR 完全失效 | DSP 全数字 CDR 方案,与自适应均衡、FEC 前向纠错深度耦合,适配 PAM4 4 种电平、多阶跳变的相位识别 | 全数字信号处理,可通过窄环路带宽抑制噪声,搭配格雷编码减少跨阶误跳变带来的相位误判,鉴相逻辑远复杂于 2 电平 NRZ-CDR | PCIe5.0/6.0、400G/800G PAM4 以太网、112G/224G 高速 SerDes、数据中心光模块 |
2. CDR工作原理
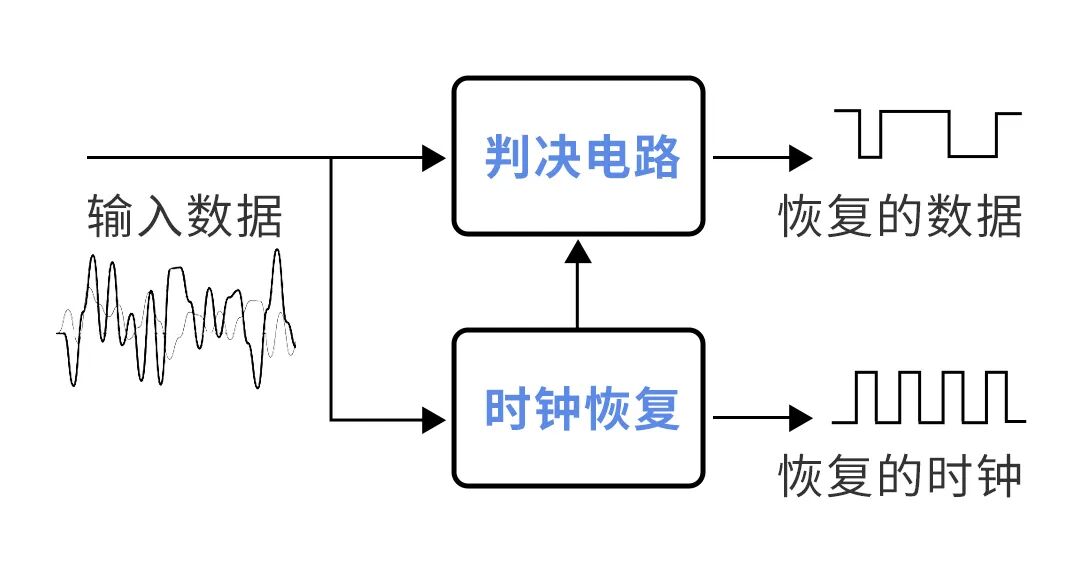
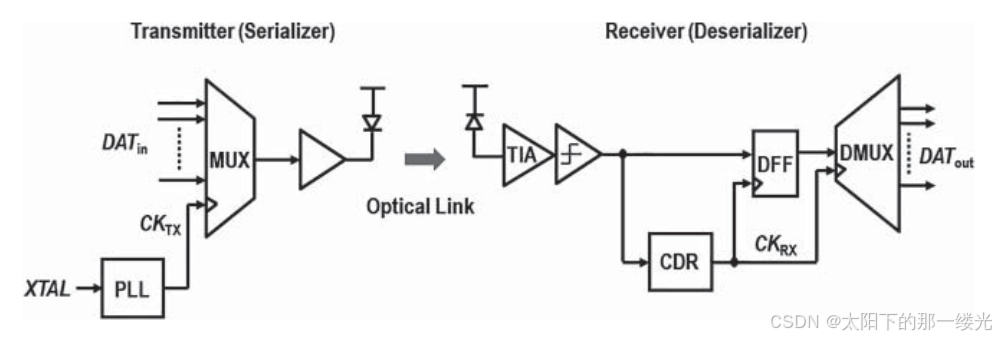
串行 SerDes 只传输单路差分数据、无独立时钟线,CDR 从输入数据流的电平跳变边沿中,提取和发送端同源同步时钟,用该时钟在眼图中心最佳采样点采集数据,抵消信道抖动、相位偏移。
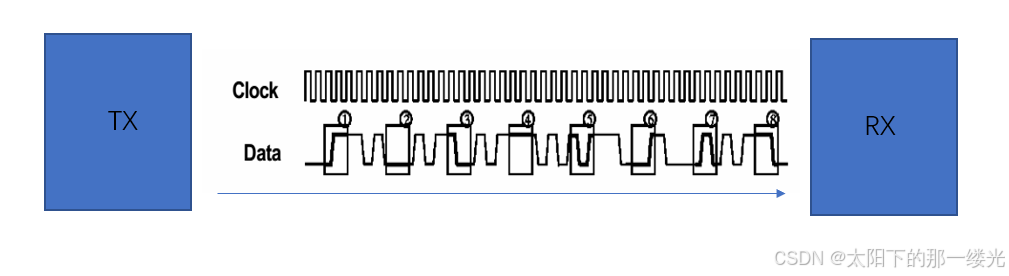
- 发送端:数据按本地时钟节拍串行输出;
- 接收端:依靠 CDR 恢复时钟做边沿采样解码;
2.1. CDR工作原理
在数据上叠加时钟,需要将数据与时钟以某种方式融合。为了得到在发送端如何将数据与时钟融合的方法,我们首先要考虑在接收端如何将数据与时钟分离。从传送过来的信号中重新获得时钟分量的方法,称为时钟再生或时钟恢复。通过检测接收到的信号的相位,可以进行时钟恢复。
-
利用本地产生的多相位时钟对数据多次采样,判断数据比特的边沿,并通过PLL将时钟边沿与其对齐,从而实现与数据同频率、同相位时钟的恢复;
-
利用已同步时钟的最优相位对输入数据采样,使其实现最高的输入信噪比,并把采样结果作为已恢复数据输出;
-
时钟是数字通信的基础,在设备发射端,数据是根据时钟的节拍,一拍一拍拍出来的。同样在接收端,数据也是根据时钟的边沿(上升沿/下降沿)来采样获得的;
| 类型 | 鉴相方式 | 适用信号 | 特点 |
|---|---|---|---|
| Bang-Bang(BB)模拟 CDR | 根据边沿超前 / 滞后二值鉴相 | NRZ (2 电平) | 电路简单,仅识别高低电平跳变,传统 10G/28G NRZ 标配 |
| DSP 数字 CDR | 多电平差值鉴相 + 数字滤波 | PAM4 (4 电平) | 识别多阶电平跳变,与 FFE/DFE/FEC 联动,112G PAM4 SerDes 专用 |
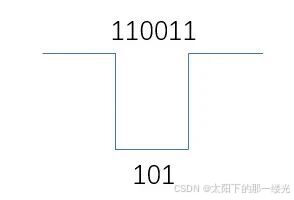
如果没有时钟做标定,一连长串的数据没有意义,如上图,是101,还是110011?
解决方案:
- 随路时钟(trigger), 不需要额外的时钟恢复,但是需要多一路时钟信道;
- 时钟恢复,需要接收端具备时钟恢复的能力;

2.2. CDR结构组成
CDR核心--锁相环(PLL:Phase Lock Loop):数据经过CDR恢复的时钟再生以后,变成理想信号,这个比较容易理解。重点就是这个时钟是怎么恢复出来的,这个也就是CDR的核心部分,即锁相环PLL。
锁相环 (phase locked loop - PLL)是一种利用相位同步产生的电压,去调谐压控振荡器以产生目标频率的负反馈控制系统。根据自动控制原理,这是一种典型的反馈控制电路,利用外部输入的参考信号控制环路内部振荡信号的频率和相位,实现输出信号频率对输入信号频率的自动跟踪,一般用于闭环跟踪电路。
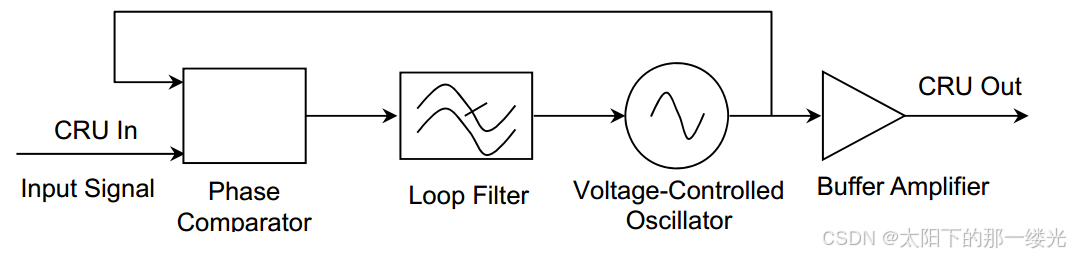
锁相环有3个部分组成:鉴相器、低通滤波器、压控振荡器(VCO)。
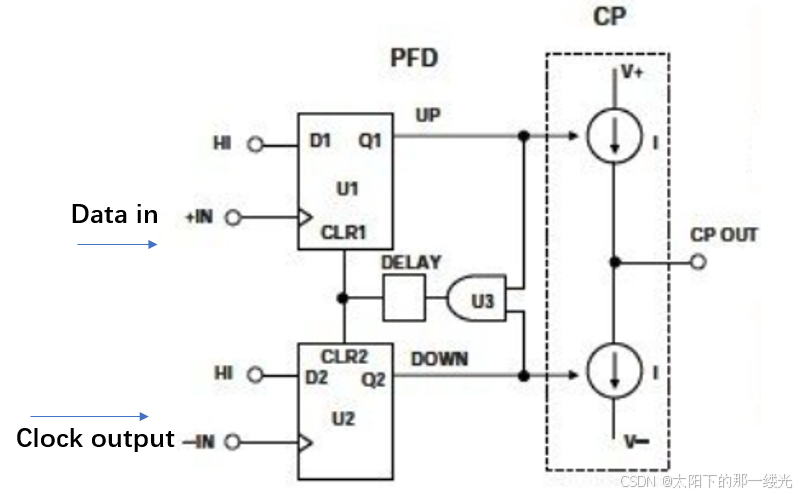
- 鉴相器(Phase Detector, PD):比较恢复时钟的边沿和输入数据跳变沿之间的相位差。
- 比较输入参考信号(如外部晶振时钟)与反馈信号的瞬时相位差,输出与相位差成正比的误差电压 uD(t)(模拟乘法器实现时,输出为两信号乘积的高频和频分量与低频差频分量之和);
- 学表达:若输入信号 ui(t)=Umsin(ωit+θi),反馈信号 uo(t)=Uocos(ωot+θo),则输出误差信号为:uD(t)=Kdsin(ωi−ωo)t+(θi−θo);
- 环路滤波器(Loop Filter, LF):将相位检测器输出的脉冲信号平滑化,滤除高频噪声,生成一个稳定的控制电压或数字信号。它决定了CDR环路的动态特性(如锁定速度、稳定性、抖动容限)。
-
低通滤波器,滤除误差信号中的高频噪声及和频分量,保留低频差频分量,生成平滑的直流控制电压 uC(t) 驱动压控振荡器;
-
常用类型包括RC积分滤波器(无源)和有源比例积分滤波器(可提高环路稳定性);
- 压控振荡器(Voltage Controlled Oscillator, VCO):根据环路滤波器输出的控制信号,实时调整自身输出时钟的频率和相位。它是本地时钟的来源。
-
根据控制电压 uC(t) 线性调节输出频率 ωo,满足关系:
ωo(t)=ω0+KouC(t)
其中 ω0为固有振荡频率,Ko为压控灵敏度(单位:rad/s·V);
-
分频器(可选)
在频率合成器中,VCO输出经分频(分频比 N)后反馈至PD,使输出频率 fo=N⋅fref(fref为参考频率);
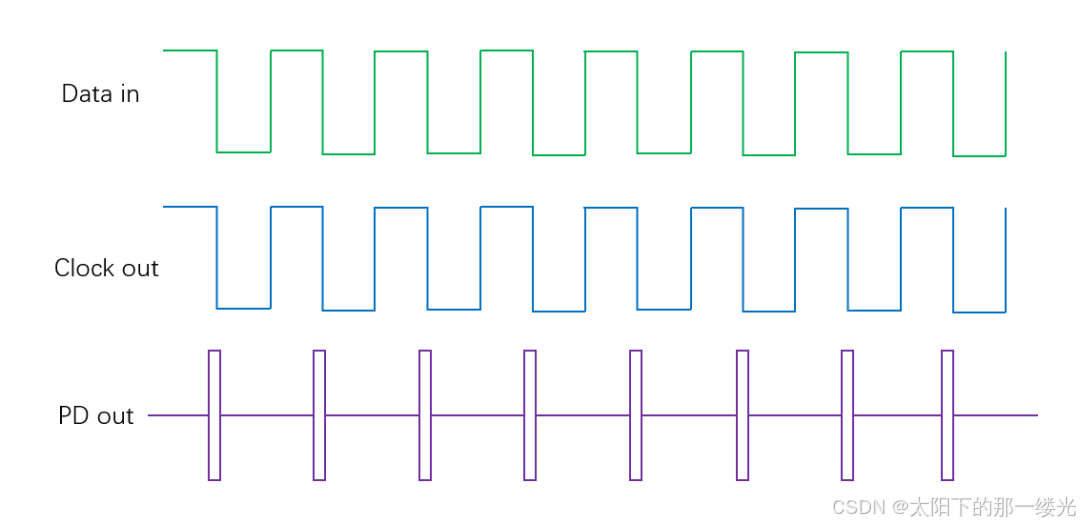
上图DATA IN是理想的010101电平。但是实际上数据输入可能是11001100011100001111,有长连0,长连1的。那么此时该如何处理呢?
对于数字逻辑来说频率最快的是0101,如果出现了长连0或者长连1以后,我们可以理解为此刻信号的频率变低了:
-
经过鉴相后PD OUT有长高/长低电平,此时VCO频率会降低,时钟就会减慢;
-
时钟减慢后,此时PD OUT又出现了高电平,又需要将时钟变快,如此反复调节完成动态的平衡,最终时钟锁定;
2.3. CDR主要架构对比
CDR主要架构包含基于锁相环的CDR和过采样CDR两种,主要对比如下:
| 基于 PLL 锁相环型 CDR(BB-CDR 主流) | 过采样型 CDR(数字 CDR 主流) | |
|---|---|---|
| 核心架构 | 完整闭环 PLL 环路,VCO 随数据边沿动态调节时钟相位 / 频率 | 采用固定高频本地参考时钟(N× 速率),无动态调相 PLL 闭环,全数字采样处理 |
| 数据跳变要求 | 必须保证充足电平跳变,依赖边沿做相位参考;长连 0 / 连 1 无跳变时 PLL 丢失参考、存在失锁风险,常搭配 8b/10b 编码提升跳变密度 | 对跳变密度约束低,长时间长码流无跳变也可正常工作,适配 PAM4 / 无编码数据流 |
| 锁定与跟踪 | 环路渐进锁相,抖动跟踪性能优异,可跟随输入低频漂移与连续抖动;锁定耗时更长 | 依靠高速时钟多倍采样,DSP 算法筛选最优采样点,锁定速度快 |
| 优 点 | 抖动抑制强、时钟跟踪能力出色、功耗偏低、模拟架构成熟 | 入锁快、适配低跳变码型、适配 PAM4 多电平数字信号、抗长连码失效 |
| 缺 点 | 长连续码易失锁、依赖编码保证跳变 | 本地参考时钟频率精度要求高、N 倍高频采样带来整体功耗更大 |
| 典型应用 | 传统 NRZ:2.5G/10G/28G SerDes、PCIe1~4 代、早期光模块 | PAM4 高速场景:56G/112G SerDes、PCIe5/6.0、400G/800G 以太网 DSP 接收机 |
2.4. CDR关键参数
CDR的关键参数,实际就是PLL的关键参数
- 锁相环的环路带宽
- 锁相环环路带宽宽,优点,容易锁定,输入抖动容限大;缺点,输出抖动大。
- 锁相环环路带宽窄,优点,输出抖动小;缺点,输入抖动容限小,容易失锁;

-
因为锁相环环路带宽的上述特性,所以要做好平衡
-
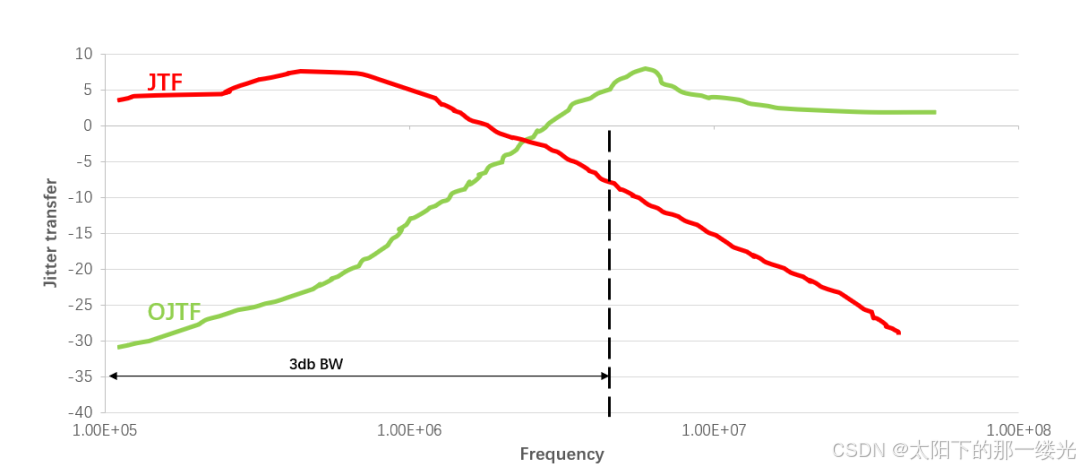
CDR的输出抖动,输入抖动容限和抖动传递函数
- CDR锁定时间