摘要
针对智能车辆弯道行驶时横向跟踪精度不足、转向平顺性不佳的问题,本文设计 ** 离散线性二次型调节器(LQR)** 横向轨迹跟踪控制策略。基于二自由度车辆动力学模型,选取横向误差、横向误差变化率、航向误差、航向误差变化率构建状态向量,融合 RX107 道路曲率信息设计前馈 - 反馈复合控制律。通过求解离散黎卡提方程得到最优状态反馈增益,设置 8m/s、12m/s、16m/s 三种行驶车速,搭配 - 0.5m、0m、0.5m 三类初始横向偏差,共计 9 组工况完成仿真验证。结果显示:全工况均可稳定跟踪参考路径,平均横向误差均方根 0.040366m,误差最大收敛时长 1.6s,前轮最大转向角 33.338°。该控制器跟踪精度高、动态收敛特性良好,可为智能车辆横向控制系统设计提供理论与仿真参考。
关键词 :车辆横向控制;轨迹跟踪;离散 LQR;二自由度模型;路径误差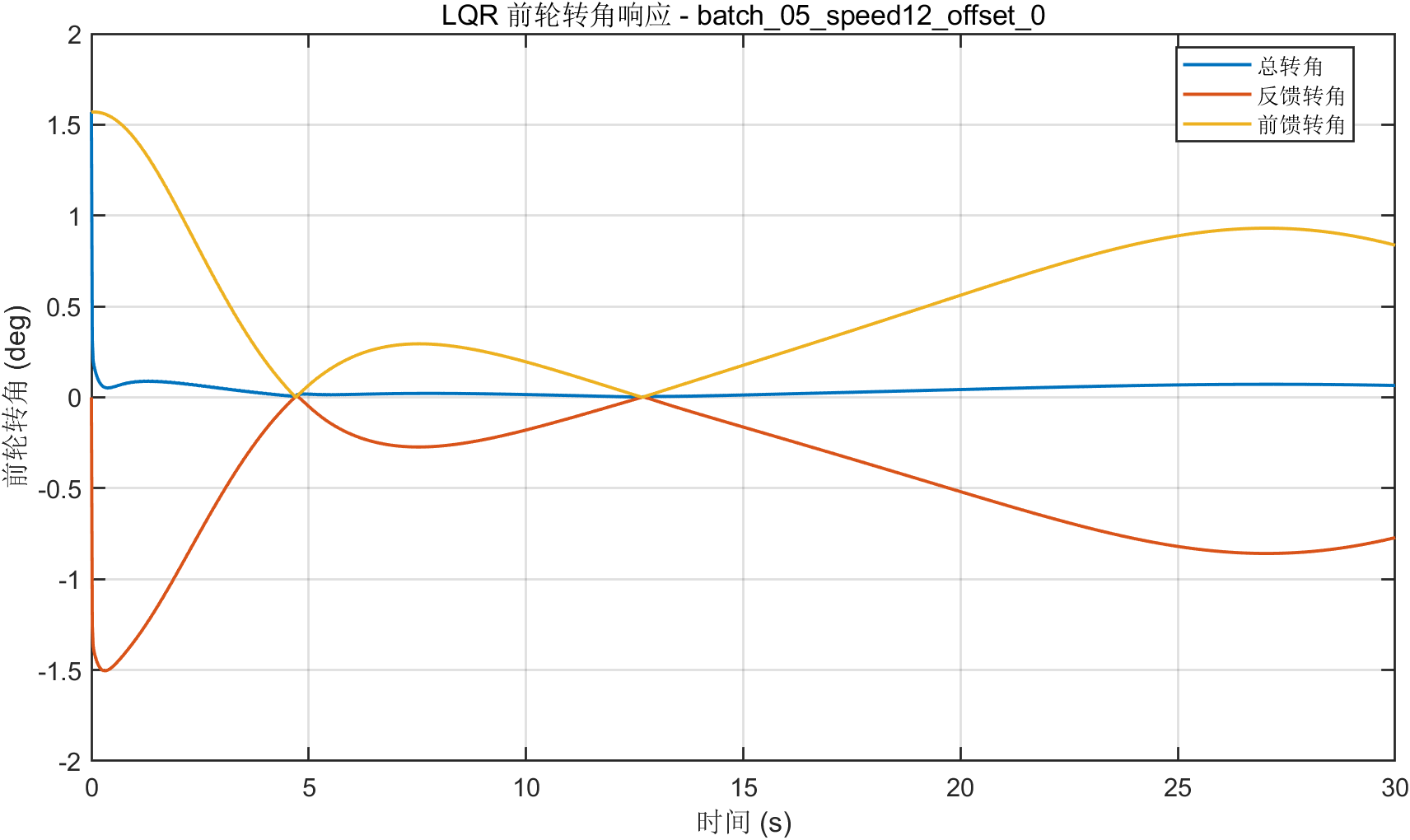
1 引言
车辆横向轨迹跟踪是智能驾驶运动控制的核心环节,控制目标为保证车辆动力学安全约束前提下,精准跟随预设参考路径。弯道行驶、初始路径偏移场景中,控制器既要快速消除位置与航向偏差,也要合理约束转向幅值与动作速率,兼顾跟踪精度与驾乘平顺性。
线性二次型调节器以二次型性能指标最小化为优化目标,可均衡状态偏差与控制输入损耗。相较于纯几何跟踪算法,LQR 能够纳入车辆动力学特性;相较于传统试凑参数控制,权重矩阵物理意义清晰、参数整定逻辑规范。本文依托二自由度横向误差模型,搭建离散 LQR 复合控制器,通过多车速、多初始偏差仿真,全面检验弯道轨迹跟踪控制性能。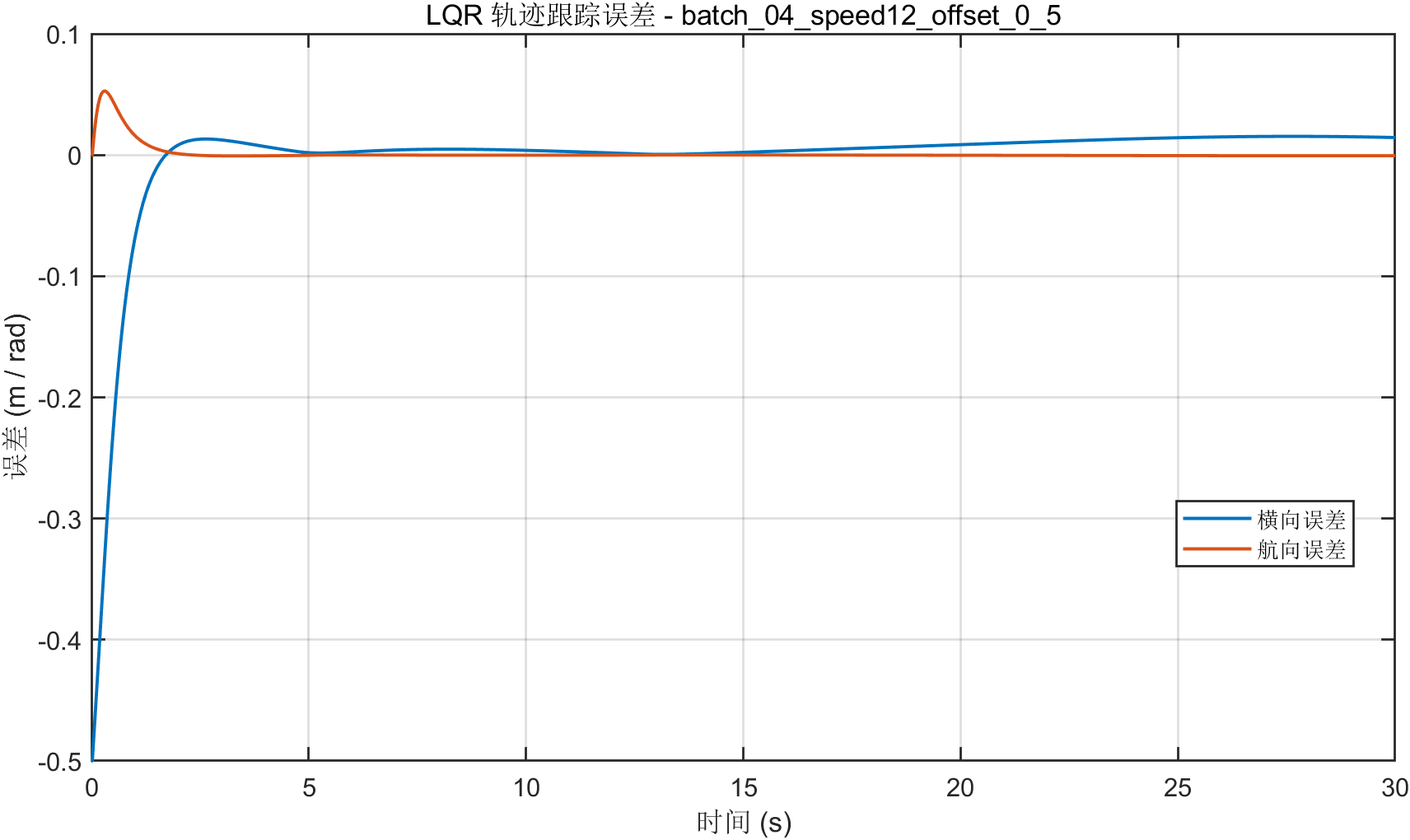
2 研究方法
2.1 车辆动力学模型
采用车辆二自由度横向运动模型,整车关键参数:整车质量 1592kg,前后轮等效侧偏刚度均为 80414N/rad,质心至前轴距离 1.180m,质心至后轴距离 1.770m,横摆转动惯量 2488kg・m²,前轮最大转角限值 40.4°。仿真过程单个工况纵向车速恒定,划分三档测试车速。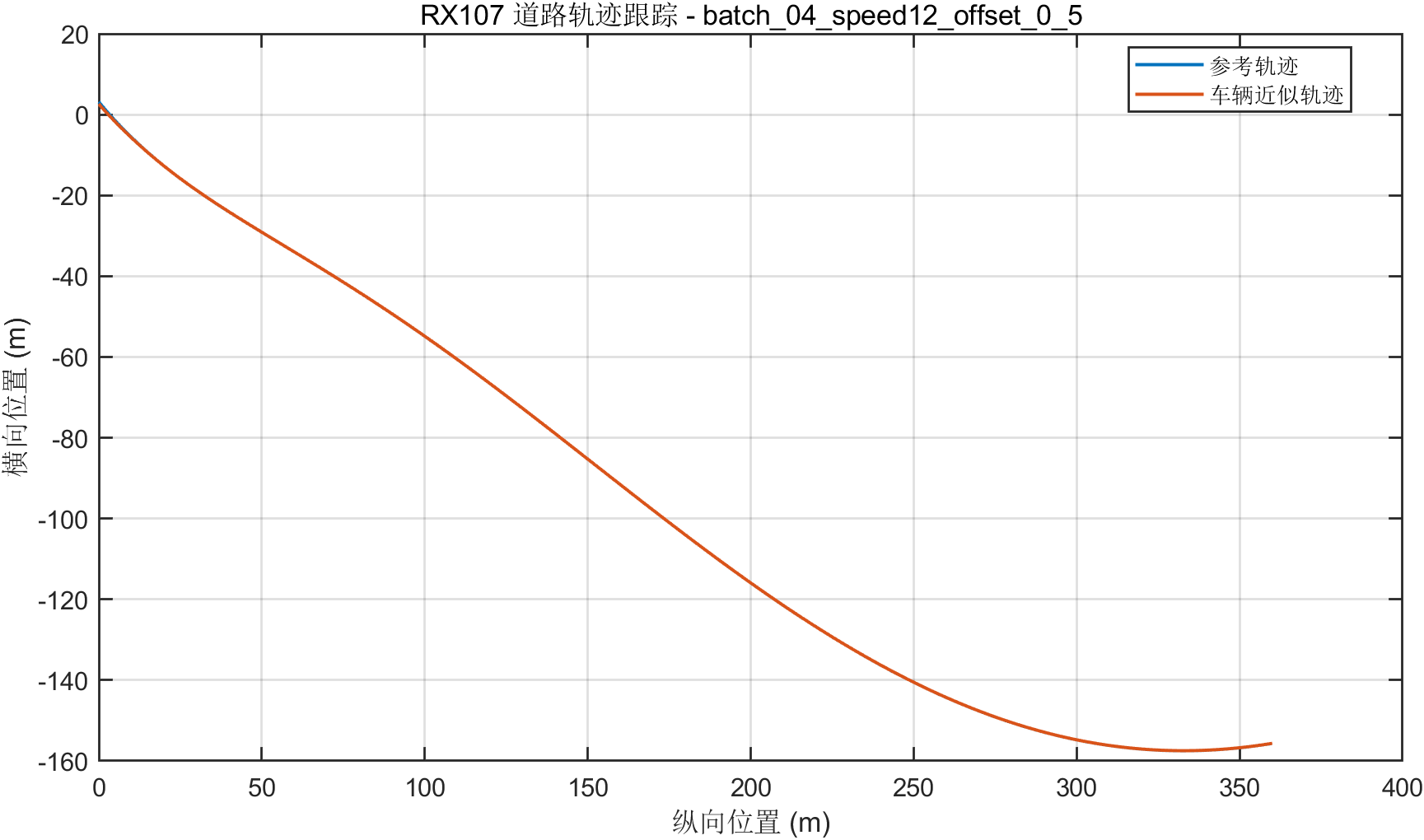
2.2 状态空间与离散处理
选取四维状态向量:\(\boldsymbol{x}=\lefte_y,\\dot e_y,e_\\psi,\\dot e_\\psi\\right^\mathrm{T}\)式中:\(e_y\)为横向位置误差,\(\dot e_y\)为横向误差变化率,\(e_\psi\)为航向角误差,\(\dot e_\psi\)为航向误差变化率。对连续状态方程做双线性离散变换,仿真采样周期 0.02s,总仿真时长 30s。
2.3 LQR 控制器设计
性能指标权重矩阵配置:\(\boldsymbol{Q}=\mathrm{diag}(30,8,13,20),\quad R=2\)权重侧重约束横向与航向偏差,同时限制转向控制量输出幅值。求解离散黎卡提方程获取反馈增益矩阵,反馈控制量:\(\delta_{fb}=-\boldsymbol{K}\boldsymbol{x}\)结合道路曲率计算稳态转向前馈补偿量\(\delta_{ff}\),最终前轮转角:\(\delta=\delta_{fb}+\delta_{ff}\)输出转角严格限定在机械极限范围内。
2.4 仿真工况与评价指标
参考路径选用 RX107 标准曲线路线,组合 3 种车速、3 种初始横向偏差,形成 9 组对照工况。采用横向误差均方根、航向误差均方根、最大前轮转角、转角变化速率、误差收敛时间、稳态残余误差作为综合评判指标。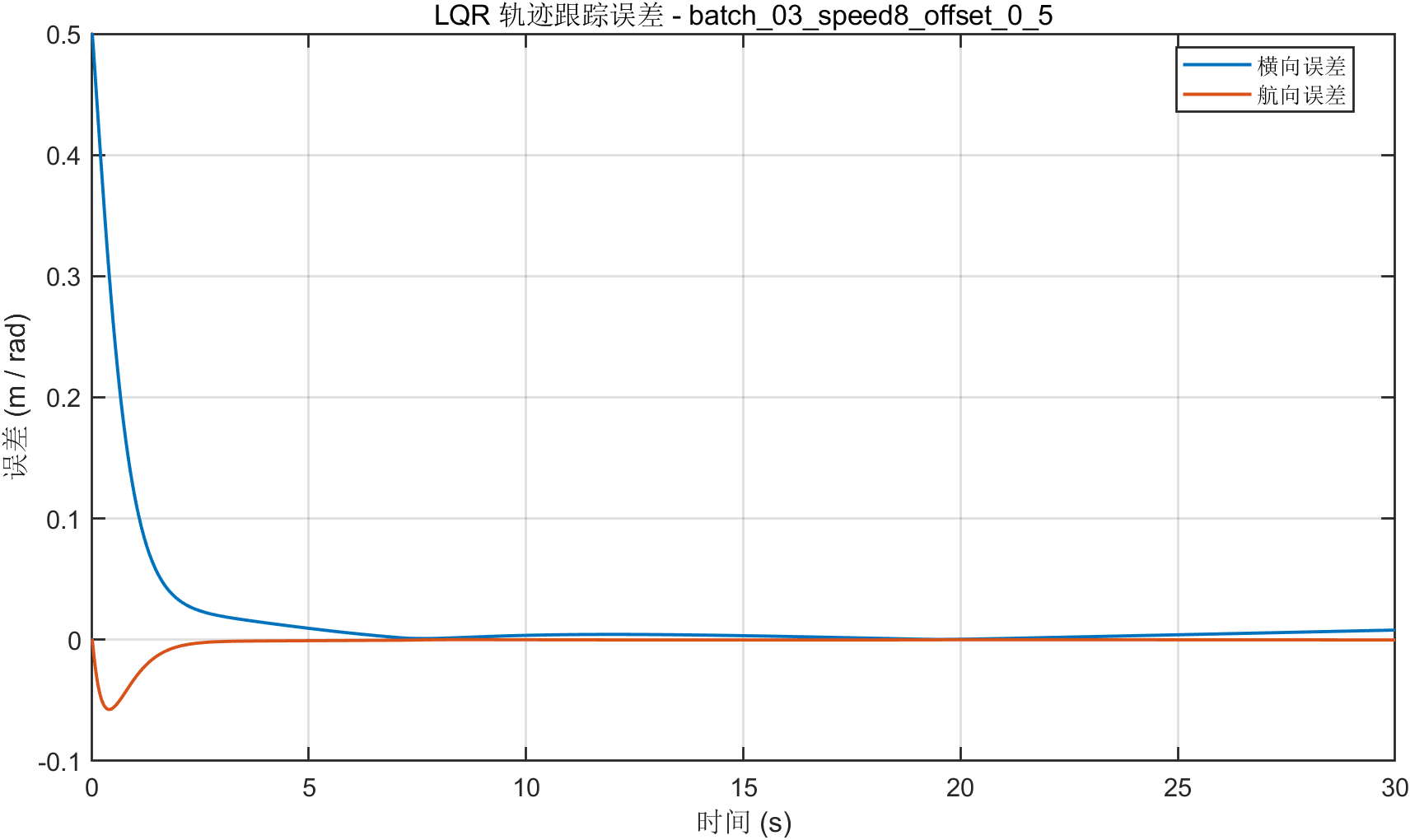
3 仿真结果
整套工况下车辆均无失稳现象,可平稳贴合参考轨迹行驶。全局统计指标:平均横向误差均方根 0.040366m,平均航向误差均方根 0.004943rad,最长收敛时间 1.6s,前轮最大转角 33.338°。
低速 8m/s 工况:初始偏差 ±0.5m 时,横向误差均方根依次为 0.054163m、0.057995m,收敛时间分别为 1.18s、1.6s;零初始偏差工况跟踪精度最优,误差均方根仅 0.007711m,转向动作幅度极小。
中速 12m/s 工况:正负初始偏差对应的误差均方根为 0.053616m、0.057647m,收敛速度小幅提升;无偏移工况误差均方根 0.010247m,路径保持能力稳定。
高速 16m/s 工况:偏差工况误差水平与中低速基本持平,零偏差工况误差均方根 0.010871m;全工况稳态残余误差数值微小,高速下依旧具备可靠跟踪能力。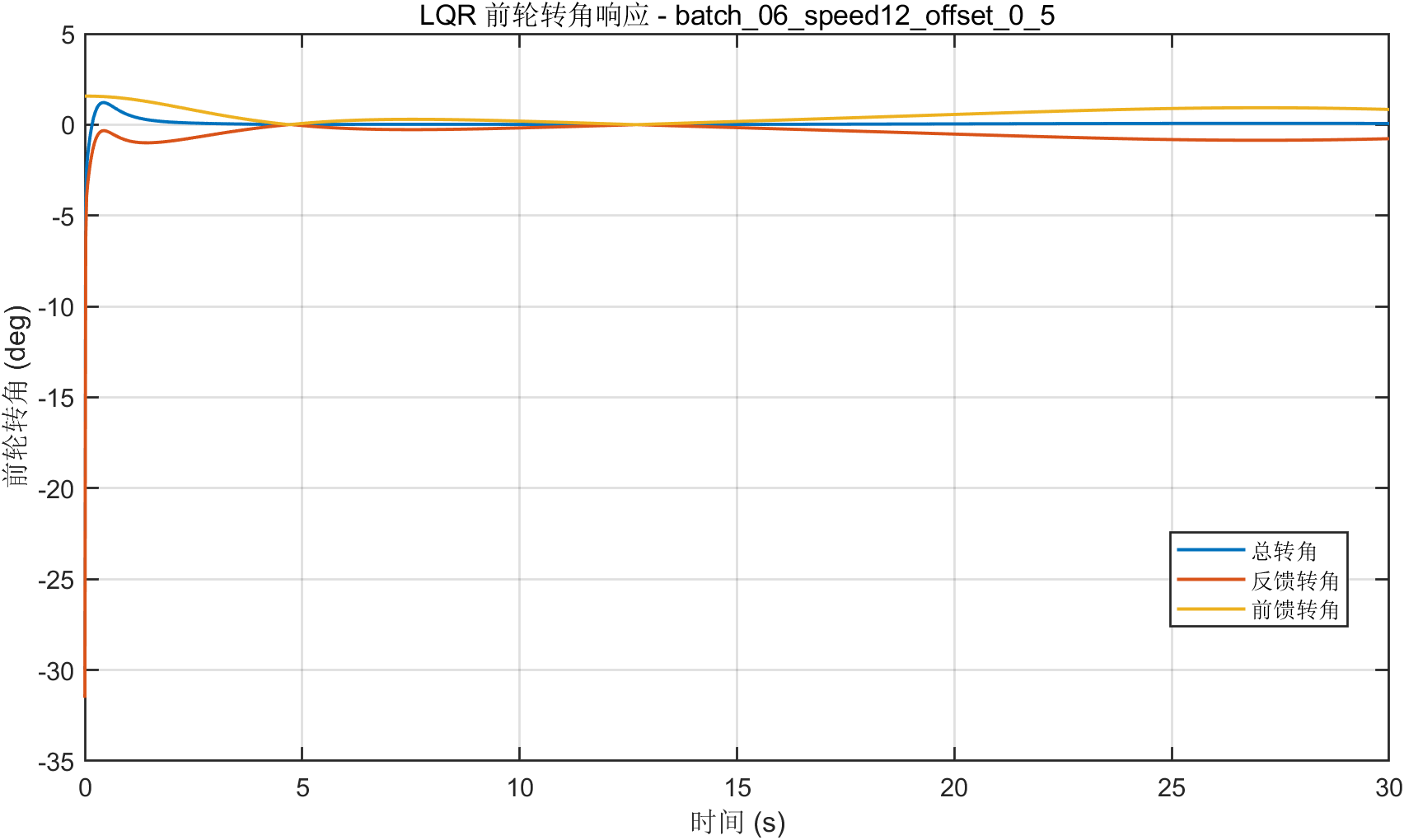
4 分析与讨论
控制器对初始路径偏移具备优良修正能力,±0.5m 初始偏差均可在 1.6s 内收敛至合理区间;无初始偏移时弯道跟随误差控制在 0.011m 以内,曲率前馈补偿有效抵消弯道稳态转向需求。
车速提升会小幅增大跟踪误差,但系统始终稳定,算法具备一定车速适应性。高速纠偏过程中转角速率明显升高,瞬时转向动作偏剧烈,易影响行驶平顺性,后续可增加控制量变化率惩罚项,约束转向动作快慢。
前馈补偿负责适配弯道基础转向需求,状态反馈动态修正各类行驶偏差,复合控制结构适配弯道跟踪场景。当前权重参数下跟踪精度表现良好,但转角峰值偏高,误差收敛速度、转向幅值、平顺性三者存在制衡关系,可通过调整权重矩阵配比优化综合性能。
5 结论
本文基于二自由度车辆模型,设计带曲率前馈的离散 LQR 横向轨迹跟踪控制器,完成多车速、多初始偏差弯道仿真测试。结果表明:8~16m/s 车速区间内系统运行稳定,全工况平均横向误差均方根 0.040366m,误差收敛快速,横向与航向跟踪效果优异。
离散 LQR 算法可有效权衡轨迹偏差与转向控制输入,适用于弯道车辆横向控制场景。同时仿真发现高速工况转向瞬态动作偏大,实际装车应用还需叠加执行机构约束、转角速率限制,并开展多控制算法对比测试。该控制方案综合性能良好,能够满足智能车辆弯道轨迹跟踪基本使用要求。