无人机航拍光伏板状态识别数据集 | 太阳能板异常检测、智能巡检、深度学习模型训练素材第10340期
标签:#光伏板缺陷检测 #无人机视觉巡检 #深度学习数据集 #YOLO目标检测 #太阳能设备智能化运维 #计算机视觉实战 #图像分类数据集
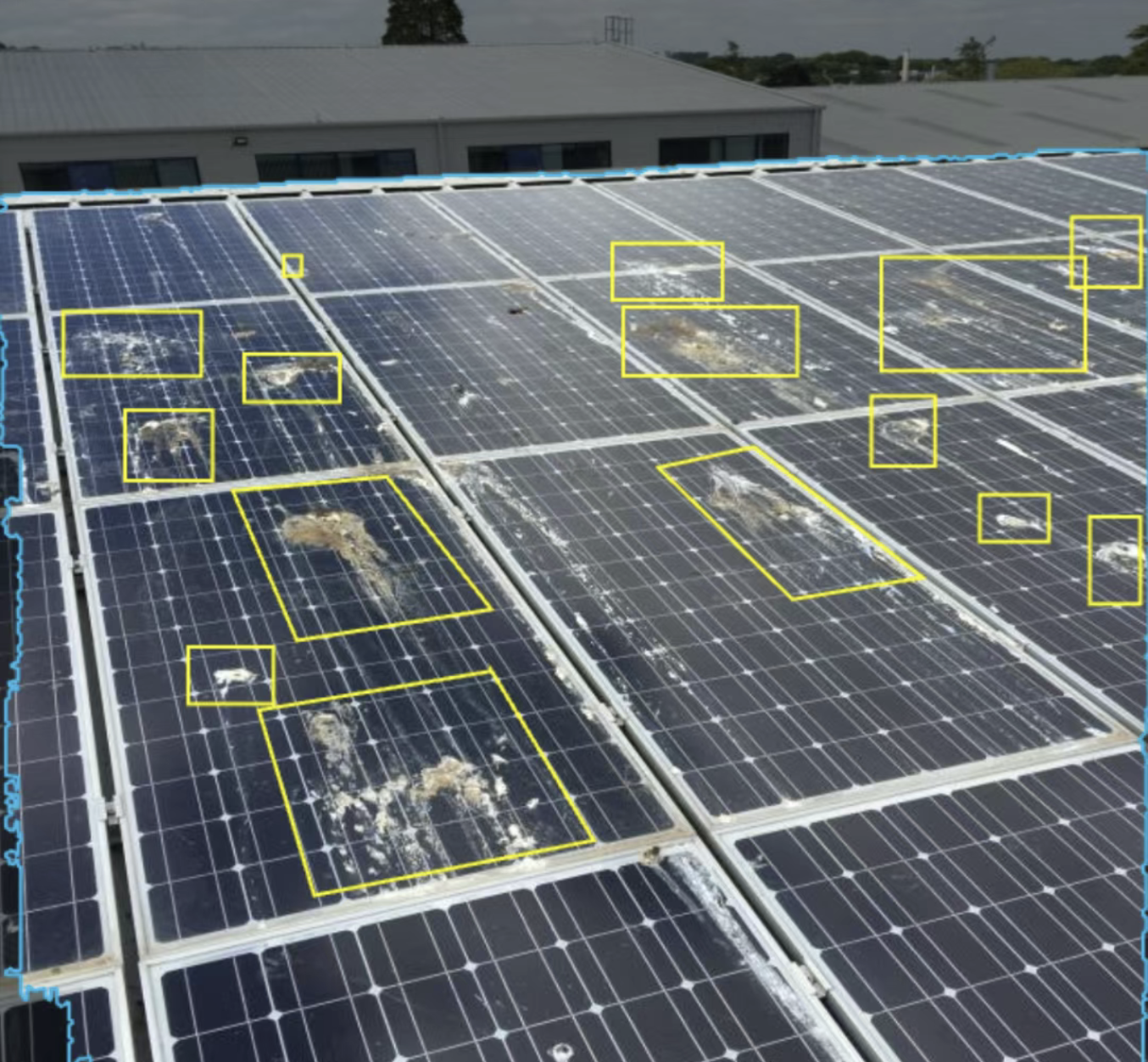
当下光伏电站规模持续扩张,山地、荒漠、连片分布式光伏站点大量落地,传统人工巡检模式暴露出巡检效率低、人工成本高、高空作业风险大、缺陷漏检率偏高等痛点。无人机航拍结合计算机视觉技术,已成为光伏电站自动化巡检的主流方案,而高质量场景化图像数据集,是训练高精度缺陷识别模型、落地智能巡检系统的核心基石。本套面向无人机视角的太阳能光伏板图像数据集,覆盖光伏板全品类常见异常、污染、损伤及正常工况,完美适配图像分类、目标检测等深度学习任务,可直接用于光伏智能巡检算法研发、模型训练、项目落地与学术实验,大幅降低开发者数据采集与标注成本。
二、数据集整体介绍
2.1 核心概述
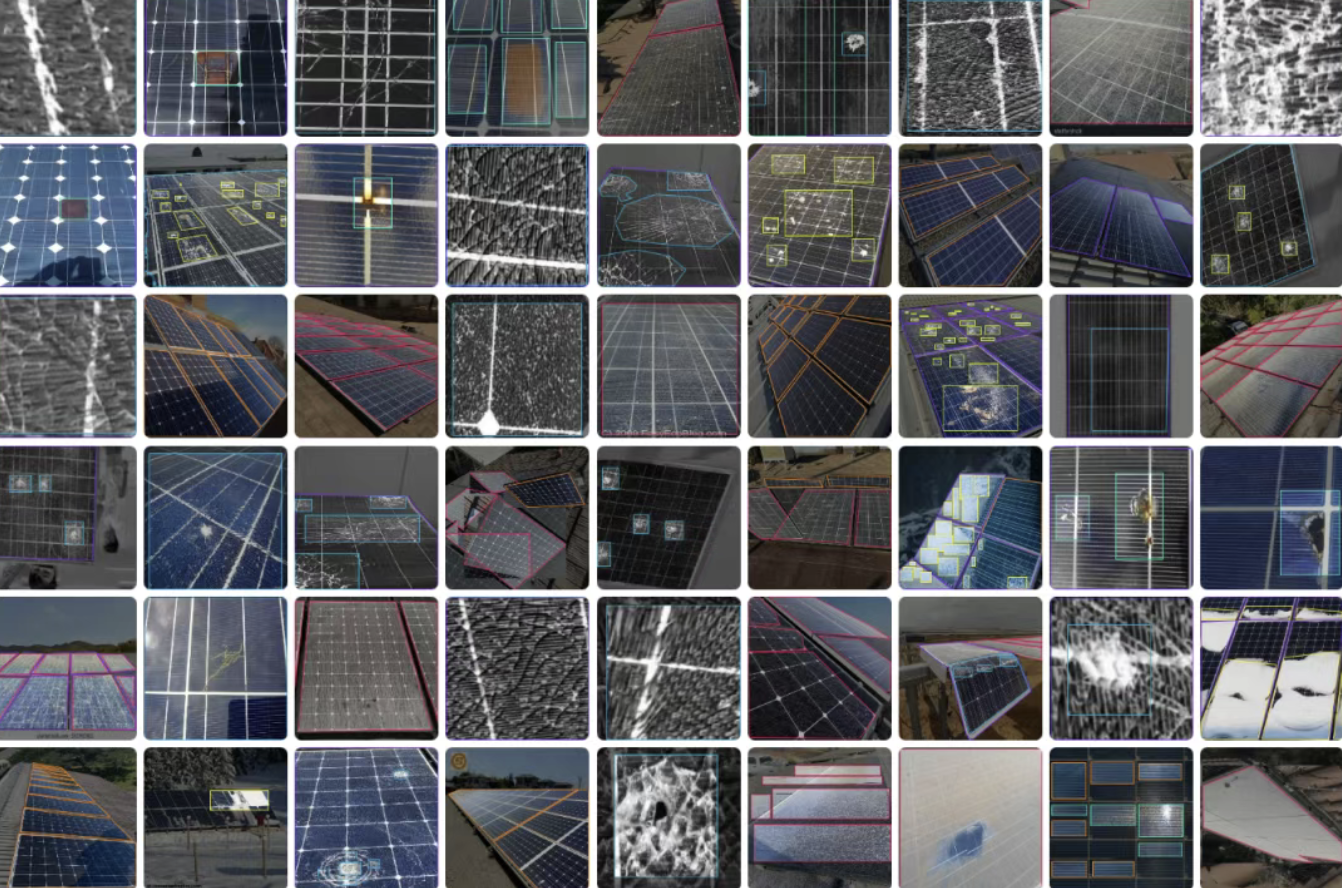
本数据集为无人机航拍视角下的太阳能光伏板图像数据,聚焦光伏电站日常运维中的各类典型状态,兼顾设备本体缺陷、外部环境干扰、正常无故障状态 三大场景,数据场景贴合真实户外巡检工况,适配中小型深度学习模型快速训练、验证、调优,同时可作为光伏视觉算法入门与进阶实战的标准数据集。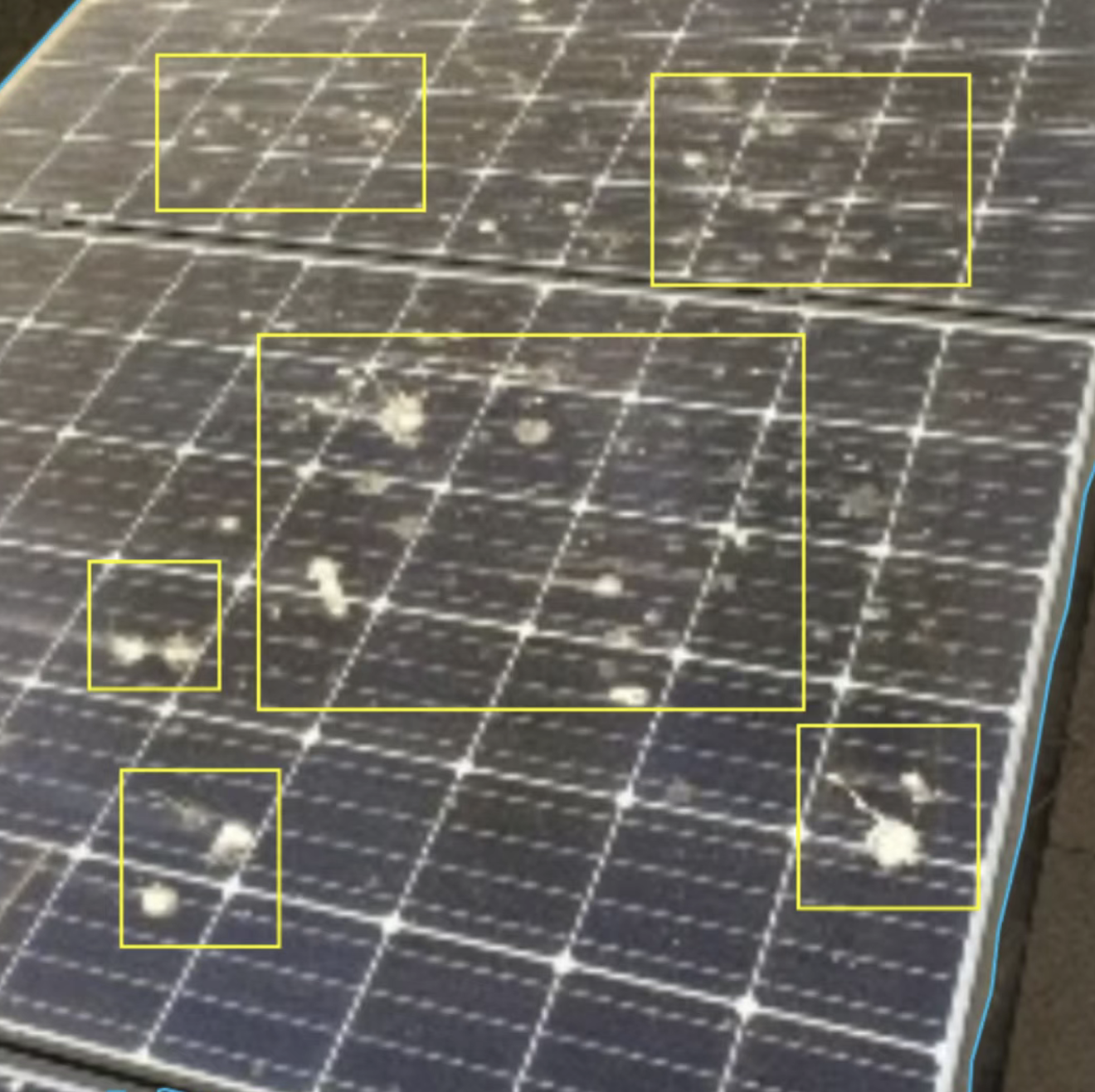
2.2 类别明细(7大类完整标注)
数据集统一划分7大语义类别,中英文标签一一对应,适配国内外主流深度学习框架与标注规范,覆盖光伏运维全场景识别需求:
| 英文标签 | 中文释义 | 场景说明 |
|---|---|---|
| Bird Drop | 鸟类排泄物 | 光伏板表面鸟粪污染,户外电站高频出现的外部遮挡/污染 |
| Defective | 一般性缺陷 | 光伏板板面轻微破损、性能异常等综合类缺陷 |
| Dusty | 积灰污染 | 长期户外放置导致板面布满灰尘,影响发电效率 |
| Electrical Damage | 电气类损伤 | 线路、组件电路故障引发的外观损伤,属于高危故障 |
| Non Defective | 无缺陷(正常) | 光伏板完好无损、工况正常,作为负样本对照类别 |
| Physical Damage | 物理损伤 | 撞击、风化、外力破坏造成的板面开裂、碎裂等实体损伤 |
| Snow | 积雪覆盖 | 冬季户外光伏板积雪遮挡场景,高寒地区重点识别类别 |
2.3 基础参数与适配性
- 数据总量:共计760张实景图像,数据规模适中,可快速完成模型迭代,有效规避小样本场景下的模型过拟合问题;
- 图像格式:通用图像格式,支持主流深度学习框架、标注工具、视觉模型直接读取,可拖拽上传测试,完全适配计算机视觉模型输入标准;
- 适用任务:图像分类、单类别目标检测、多状态语义判别,兼容YOLOv8、ResNet、MobileNet、Swin-Tiny等主流轻量/中型模型。
2.4 核心应用价值
- 产业落地:赋能光伏电站全自动巡检系统,替代人工完成大范围光伏板状态筛查,降低运维人力成本与安全风险,提升故障响应速度;
- 技术研发:为光伏专用视觉模型提供标准化训练数据,助力算法工程师优化目标检测、图像分类模型在户外复杂光照、航拍畸变场景下的鲁棒性;
- 学习实战:适合人工智能、深度学习学习者开展计算机视觉实战项目,从数据集处理、模型训练到部署落地完成全流程练习;
- 运维保障 :基于数据集训练的算法可集成至无人机巡检设备,实现光伏板状态实时监测、故障自动上报、分类统计,保障光伏发电系统稳定运行。
三、环境依赖与前期准备
3.1 运行环境
推荐Python 3.8~3.11版本,适配Windows、Linux、macOS全平台,GPU环境(NVIDIA CUDA 11.3+)可大幅提升训练速度,CPU环境支持基础训练与推理测试。
3.2 依赖库安装
执行以下命令安装深度学习、图像处理、数据处理必备依赖,适配YOLOv8及传统分类模型:
bash
# 一键安装全套依赖(光伏视觉检测通用环境)
pip install ultralytics opencv-python numpy pillow matplotlib scikit-learnultralytics:YOLOv8官方框架,核心用于目标检测、图像分类训练与推理;opencv-python:图像读取、预处理、可视化标注;scikit-learn:用于数据集划分、数据统计、评估指标计算。
四、深度学习实战代码(带场景经验注释)
结合数据集特性,提供数据集划分、YOLOv8图像分类训练、单图推理检测、批量图像检测 四大核心代码模块,所有代码针对无人机光伏板图像场景做针对性优化,附带实战经验注释。
4.1 数据集自动划分脚本(训练集/验证集 8:2)
场景经验:光伏图像存在光照差异、拍摄角度畸变,采用随机打乱划分可保证两类数据集场景分布均匀;760张数据按照8:2划分,训练集608张、验证集152张,符合中小型数据集划分标准,避免验证集样本过少导致评估失真。
python
import os
import random
import shutil
# ===================== 配置项(根据本地路径修改)=====================
# 原始数据集根目录(所有图像存放路径)
raw_img_dir = "./pv_raw_images"
# 划分后数据集输出目录
split_dataset_dir = "./pv_split_dataset"
# 训练集:验证集 = 8:2
train_ratio = 0.8
# 支持的图像后缀
img_suffix = [".jpg", ".png", ".jpeg"]
# ===================================================================
def split_pv_dataset():
# 创建训练集、验证集文件夹
train_dir = os.path.join(split_dataset_dir, "train")
val_dir = os.path.join(split_dataset_dir, "val")
os.makedirs(train_dir, exist_ok=True)
os.makedirs(val_dir, exist_ok=True)
# 遍历所有类别文件夹(对应7大分类)
class_list = os.listdir(raw_img_dir)
for cls_name in class_list:
cls_raw_path = os.path.join(raw_img_dir, cls_name)
if not os.path.isdir(cls_raw_path):
continue
# 为每个类别创建对应文件夹
cls_train_path = os.path.join(train_dir, cls_name)
cls_val_path = os.path.join(val_dir, cls_name)
os.makedirs(cls_train_path, exist_ok=True)
os.makedirs(cls_val_path, exist_ok=True)
# 获取当前类别下所有图像文件
img_list = []
for img_name in os.listdir(cls_raw_path):
if os.path.splitext(img_name)[-1].lower() in img_suffix:
img_list.append(img_name)
# 随机打乱数据(关键:避免连续同场景数据影响训练)
random.shuffle(img_list)
split_idx = int(len(img_list) * train_ratio)
train_imgs = img_list[:split_idx]
val_imgs = img_list[split_idx:]
# 拷贝图像至对应文件夹
for img in train_imgs:
shutil.copy(os.path.join(cls_raw_path, img), os.path.join(cls_train_path, img))
for img in val_imgs:
shutil.copy(os.path.join(cls_raw_path, img), os.path.join(cls_val_path, img))
print("数据集划分完成!")
print(f"训练集路径:{train_dir}")
print(f"验证集路径:{val_dir}")
if __name__ == "__main__":
split_pv_dataset()4.2 YOLOv8 图像分类模型训练代码
场景经验 :无人机航拍光伏图像分辨率适中,设置imgsz=640兼顾精度与速度;batch=8适配入门级GPU(4G显存以上);户外图像光照复杂,开启数据增强提升模型泛化能力;针对7分类任务,直接使用YOLOv8分类分支,无需额外修改网络结构。
python
from ultralytics import YOLO
# ===================== 训练配置(光伏分类场景专属优化)=====================
# 数据集配置路径(上一步划分后的数据集根目录)
dataset_path = "./pv_split_dataset"
# 选择模型:yolov8n-cls(轻量快速) / yolov8s-cls(精度更高,推荐)
model_name = "yolov8s-cls.pt"
# 训练轮次:760张小样本数据集,100轮足够收敛,无需过大轮次防止过拟合
epochs = 100
# 输入图像尺寸:适配无人机航拍图像标准尺寸
img_size = 640
# 批次大小:4G显存设4,8G及以上设8/16
batch_size = 8
# 设备:0=GPU,"cpu"=纯CPU运行
device = 0
# =========================================================================
def train_pv_classify_model():
# 加载预训练分类模型(迁移学习,大幅提升小样本训练效果)
model = YOLO(model_name)
# 启动训练
train_results = model.train(
data=dataset_path,
epochs=epochs,
imgsz=img_size,
batch=batch_size,
device=device,
# 开启自动数据增强:适配户外光照、角度变化,光伏场景必开
augment=True,
# 早停机制:连续15轮精度不提升则停止训练,防止过拟合
patience=15,
# 实验名称,训练结果自动保存至runs/classify/目录
name="pv_panel_7cls_train"
)
print("模型训练完成!最优权重文件已保存至 runs/classify/pv_panel_7cls_train/weights/best.pt")
return train_results
if __name__ == "__main__":
train_pv_classify_model()4.3 单张光伏图像推理检测代码
场景经验 :推理置信度阈值conf=0.3,适配户外航拍图像模糊、反光问题,降低漏检;输出类别名称与原始数据集标签一一对应,可直接对接运维系统做结果解析。
python
from ultralytics import YOLO
import cv2
# ===================== 推理配置 =====================
# 训练完成的最优模型权重路径
best_weight = "./runs/classify/pv_panel_7cls_train/weights/best.pt"
# 待检测光伏图像路径
test_img_path = "./test_pv.jpg"
# 7大类标签映射(与数据集严格对应)
class_mapping = [
"Bird Drop", "Defective", "Dusty", "Electrical Damage",
"Non Defective", "Physical Damage", "Snow"
]
# ====================================================
def pv_single_image_predict():
# 加载训练好的模型
model = YOLO(best_weight)
# 执行推理:conf为置信度阈值,光伏反光图像建议调低至0.25~0.3
results = model(test_img_path, conf=0.3)
# 解析推理结果
for res in results:
# 获取预测类别ID与置信度
pred_cls_id = res.probs.top1
pred_conf = res.probs.top1conf.item()
pred_cls_name = class_mapping[pred_cls_id]
print("===== 光伏板检测结果 =====")
print(f"预测状态:{pred_cls_name}")
print(f"置信度:{round(pred_conf, 4)}")
# 可视化图像(弹窗展示)
img = cv2.imread(test_img_path)
cv2.imshow("PV Panel Detection Result", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == "__main__":
pv_single_image_predict()4.4 批量图像检测脚本(适配无人机批量航拍图像)
场景经验:无人机巡检会一次性产出大量航拍图,该脚本支持批量遍历文件夹检测,自动输出统计日志,可直接集成至无人机巡检后台,实现自动化批量筛查。
python
from ultralytics import YOLO
import os
# ===================== 批量检测配置 =====================
best_weight = "./runs/classify/pv_panel_7cls_train/weights/best.pt"
# 批量图像文件夹路径
batch_img_dir = "./batch_pv_images"
class_mapping = [
"Bird Drop", "Defective", "Dusty", "Electrical Damage",
"Non Defective", "Physical Damage", "Snow"
]
img_suffix = [".jpg", ".png", ".jpeg"]
# =======================================================
def pv_batch_predict():
model = YOLO(best_weight)
# 统计各类别数量
cls_count = {name: 0 for name in class_mapping}
total_img = 0
# 遍历文件夹所有图像
for img_name in os.listdir(batch_img_dir):
if os.path.splitext(img_name)[-1].lower() not in img_suffix:
continue
total_img += 1
img_path = os.path.join(batch_img_dir, img_name)
results = model(img_path, conf=0.3)
# 统计结果
for res in results:
pred_id = res.probs.top1
pred_name = class_mapping[pred_id]
cls_count[pred_name] += 1
# 输出批量检测统计报告
print("===== 无人机光伏板批量巡检统计报告 =====")
print(f"总计检测图像数量:{total_img}")
for cls, count in cls_count.items():
ratio = round(count / total_img * 100, 2) if total_img > 0 else 0
print(f"{cls}:{count} 张,占比 {ratio}%")
if __name__ == "__main__":
pv_batch_predict()五、数据集使用建议与实战经验总结
- 模型选择建议 :入门学习、边缘设备部署(无人机端)优先使用
yolov8n-cls轻量模型,推理速度快;追求识别精度、后台服务器部署选择yolov8s-cls; - 数据优化技巧:无人机图像易出现逆光、阴影、畸变,可结合OpenCV做亮度均衡、透视变换预处理,进一步提升模型准确率;
- 过拟合规避 :本数据集为中小规模数据,训练轮次建议控制在80~120轮,搭配
patience早停机制,不要盲目加大训练轮数; - 拓展方向:可基于本数据集扩充红外图像、雨天图像,构建多场景光伏数据集;也可将分类任务转为目标检测任务,框选出缺陷具体位置,适配高精度巡检需求;
- 落地适配 :训练完成的模型可对接无人机SDK、Web后台、移动端APP,快速搭建无人机+AI光伏智能巡检完整解决方案。
六、补充说明
- 数据来源:无人机实地航拍户外光伏电站实景图像,场景真实,无合成数据,贴合工业落地场景;
- 兼容框架:YOLO系列、PyTorch、TensorFlow、PaddlePaddle等全主流深度学习框架;
- 适用人群:深度学习初学者、计算机视觉工程师、光伏行业智能化开发人员、高校科研人员。
配套标签
#无人机光伏巡检 #太阳能板缺陷识别 #深度学习数据集实战 #YOLOv8训练教程 #光伏智能化运维 #计算机视觉项目源码 #AI电力巡检