导读:
针对大尺寸物料多智能体协同搬运中的精确编队与安全导航问题,提出一种分层控制策略。上层采用增强Jump Point Search (JPS)算法,引入安全距离约束,规划全局安全路径;下层基于分布式模型预测控制(DMPC),构建四轮转向反相运动等效模型,通过虚拟领航者--跟随者框架实现编队整体运动与局部队形控制的解耦。仿真结果表明,所提控制策略在复杂环境中能够有效维持刚性编队形态,同时保证整体系统的导航精度和安全性。
作者信息:
申禹繁, 黄晓倩, 胥保春*, 刘 欣:南京工程学院应用技术学院,江苏 南京
论文详情
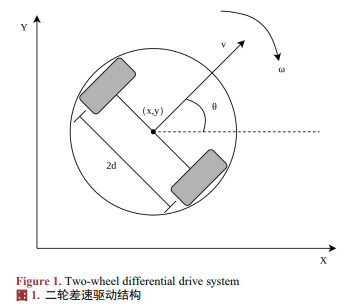
在研究过程中,单个智能体采用二轮差速驱动结构(如图 1 所示),该结构具有机械结构简单、控制逻辑清晰的特点,适用于工业搬运场景的负载需求。
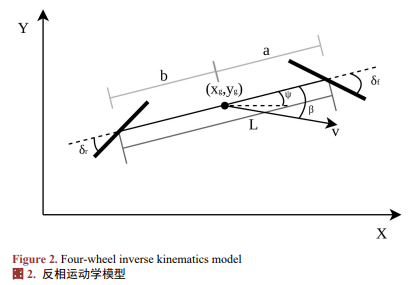
运动学模型如图 2 所示。
引入虚拟领航者概念,将编队形态与整体运动解耦。虚拟领航者不受物理约束限制,其运动轨迹由上层路径规划层生成。
基于传统 JPS 算法的基础上,引入安全距离约束和路径优化策略,设计增强 JPS 算法用于全局路径 规划,提升路径的安全性与可跟踪性。算法主要分为路径搜索和路径平滑两个阶段。
上层规划层除完成全局路径生成外,核心职责还包括实现编队整体运动控制,并将其解耦为下层各 智能体可直接跟踪的局部参考参数。
下层 DMPC 控制器的核心目标是:基于上层拆分的局部参考参数,在满足单智能体物理约束与智能体间安全约束的前提下,实现编队队形的精确保持,同时保证各智能体运动与编队整体四轮转向特性的一致性。针对四轮转向编队的高机动性与刚性需求,从预测模型、目标函数、约束条件、分布式求解四个维度进行适配设计。
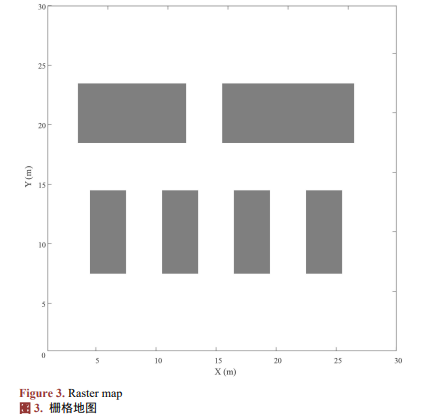
为验证所提分层编队控制策略的有效性,在 MATLAB 平台上搭建了四智能体编队仿真系统。仿真环境采用 30 × 30 的栅格地图,障碍物占比约为 15%,自定义障碍物布局用以模拟仓储障碍环境,地图中白色区域为自由空间,灰色区域为障碍物,如图 3 所示。
编队构形的空间信息与编队形状如表 1 及图 4 所示。
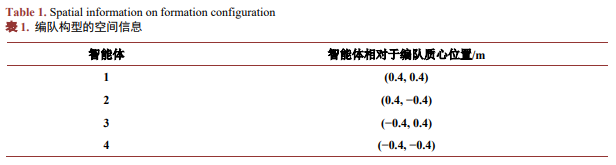
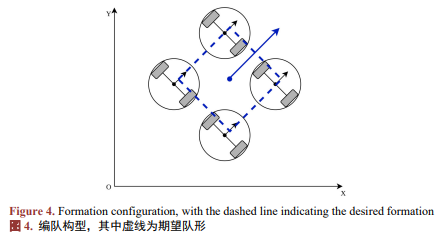
图 5 显示了全局路径规划结果及四智能体的实际运动轨迹。
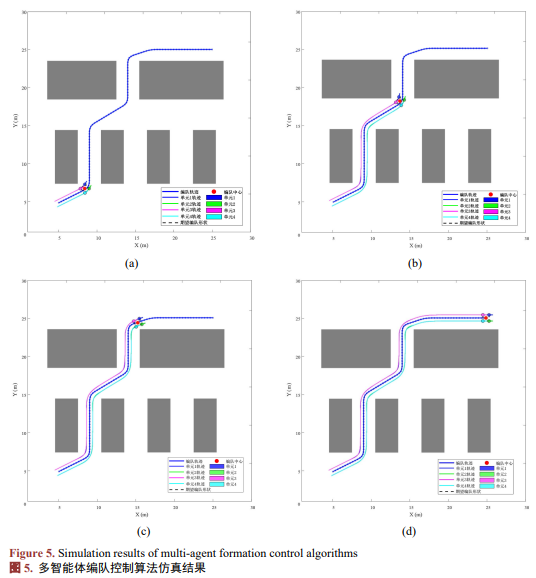
图 6 给出了编队整体跟踪误差随时间的变化曲线。
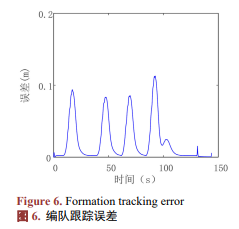
图 7、图 8 展示了各智能体之间的相对距离误差和各智能体相对于虚拟领航者的偏移误差。
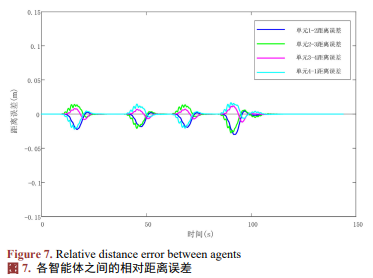
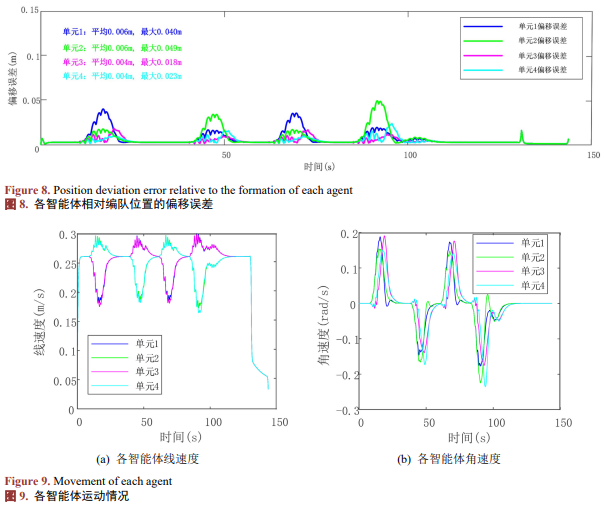
图 9 为四个智能体的线速度与角速度控制输入曲线。
综上所述,仿真结果验证了所提分层编队控制算法在编队形成与保持、复杂环境导航、控制输入合 理性及计算效率等方面的有效性,为大尺寸部件协同搬运提供了可行的技术方案。
基金项目:
南京工程学院在职博士科研资助项目(ZKJ202505)