1、OpenCV5.0的新特性
OpenCV5 是架构级大改版,彻底清理老旧 C 接口、重写 DNN 推理引擎、原生支持视觉大模型、硬件加速体系重构,最低编译标准升级至 C++17。
1.1 ONNX应用新特性
DNN 深度学习引擎是OpenCV5.0版本的最大升级。主要新特性如下:
1)全新自研推理引擎双引擎共存
新引擎默认自动启用,兼容动态输入 shape、复杂子图、现代 ONNX 算子;旧经典引擎可手动降级兼容老模型
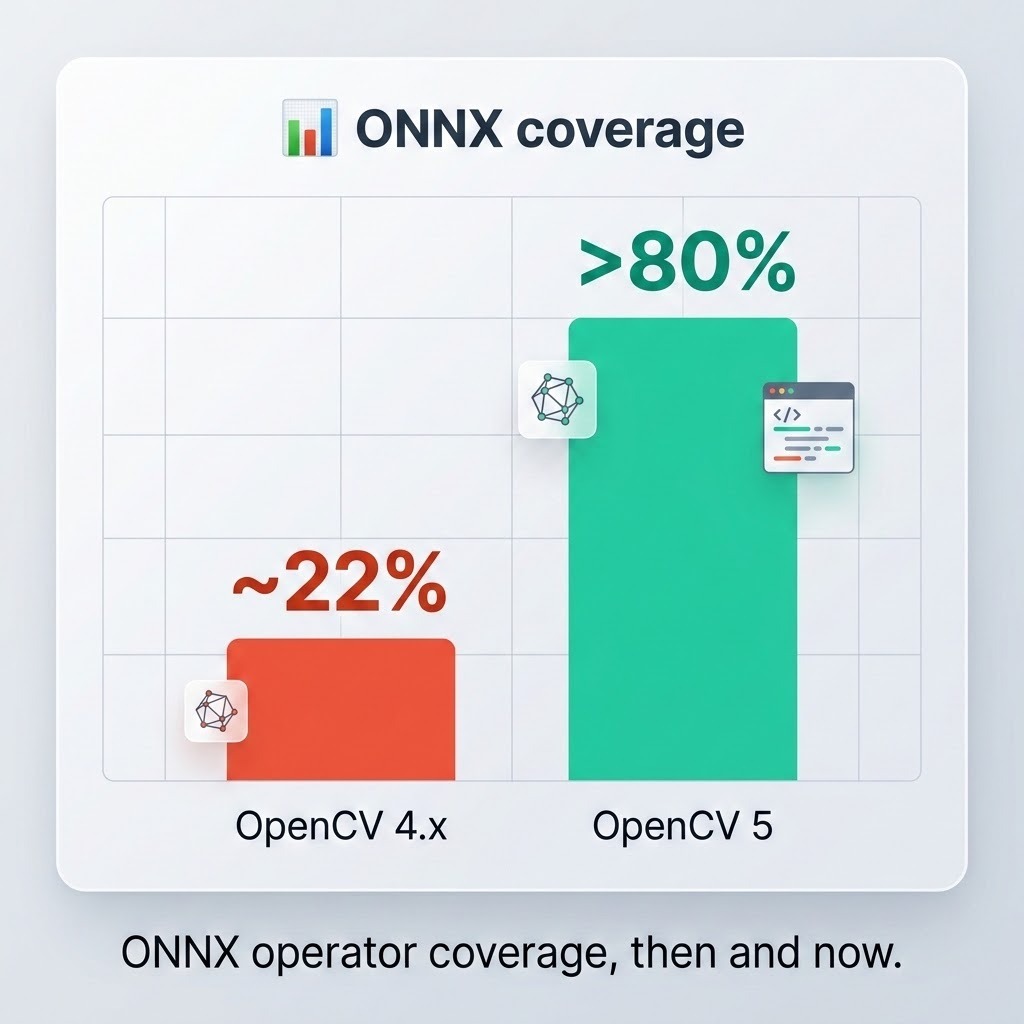
ONNX算子覆盖率从 4.x 的22% 暴涨至 80%+,YOLO、SAM、LLaVA、ResNet、Diffusion 等主流模型直接导入无压力
移除老旧 Caffe、Darknet 模型解析器,全面转向 ONNX 标准格式
2)原生支持 VLM 视觉语言大模型
内置 Tokenizer、Attention、KV 缓存、解码模块,可直接部署看图问答、图像描述类多模态模型 (LLaVA 等),不用额外套推理框架
3)推理加速扩展
可对接 ONNX Runtime 后端;CPU 矢量优化大幅提速,GPU/CUDA 支持后续迭代补齐;支持量化 INT8/FP16 轻量化推理。
1.2 语言与编译底层大清理
- 彻底废弃 C 语言 API
所有旧版cvCreateImage、cvMat等 C 接口全部移除,仅保留现代 C++、Python 绑定,代码体积大幅精简
2)C++ 最低标准强制 C++17
全面使用 std 智能指针、 constexpr、结构化绑定等现代语法,内存管理更安全,消除大量兼容宏代码
3)Python 绑定全面现代化
支持命名参数传参,不用死记函数参数顺序
类型对齐 NumPy,无隐式转换 bug;异常报错信息精准易懂
pip 一键分包:opencv-python基础、opencv-contrib-python扩展模块,版本严格锁死 5.0.0
4)新增多语言绑定:Swift、Julia 官方支持完善.
和OpenCV4.x比较如下表所示:
| 维度 | OpenCV 4.x | OpenCV 5.0 |
|---|---|---|
| C 接口 | 兼容保留 | 彻底删除 |
| C++ 标准 | C++11 起步 | 强制 C++17 |
| ONNX 覆盖 | ~22% | >80% |
| 大模型 | 仅 CNN 检测 | VLM 多模态原生支持 |
| 硬件加速 | 碎片化 ifdef | 统一 HAL 插件架构 |
| FLANN | 独立模块 | 内置 Annoy 替代 |
2 下载及安装
OpenCV5.0下载地址为:https://github.com/opencv/opencv/releases
下载页面如下图所示:
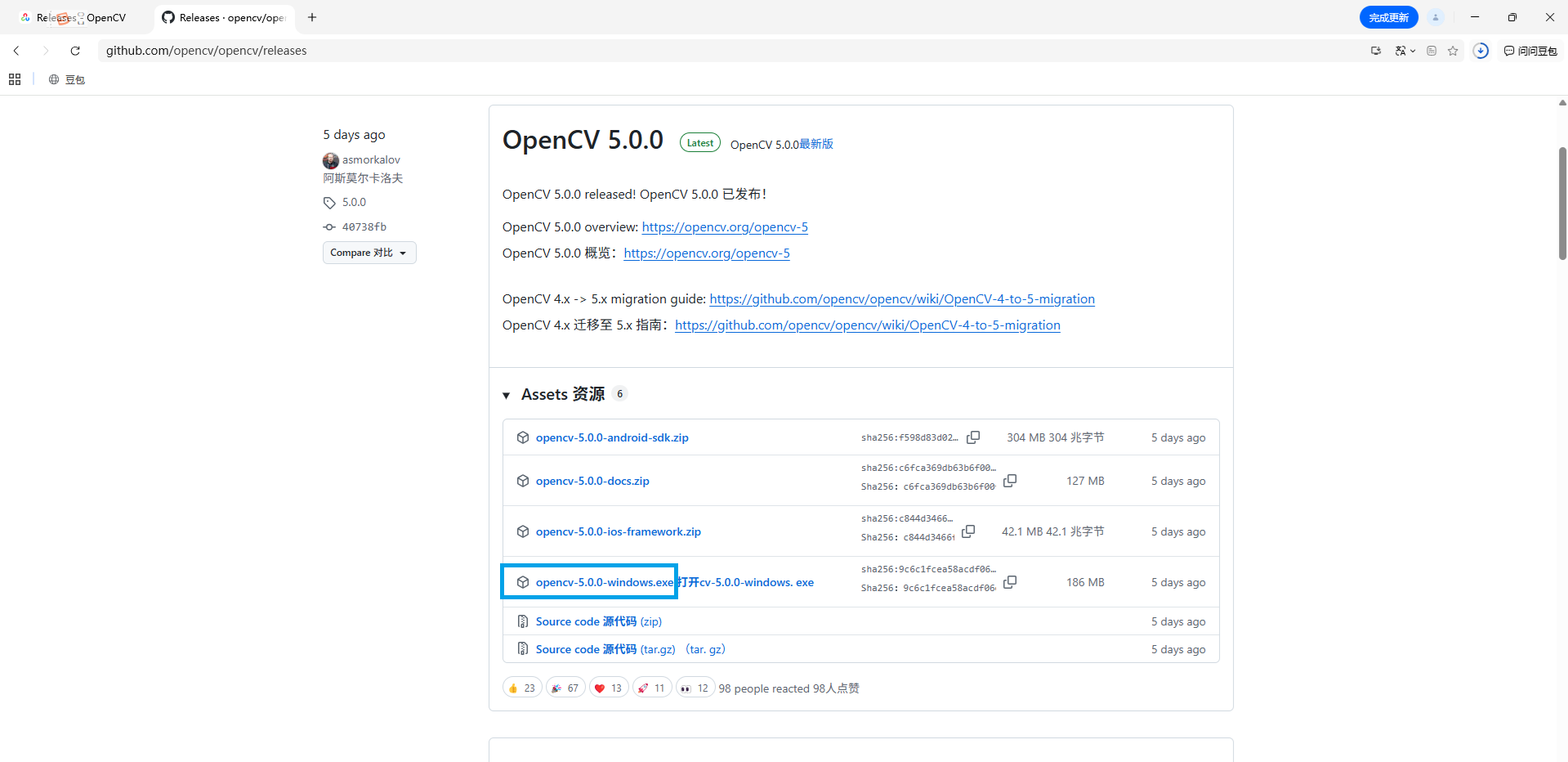
按上图下载opencv-5.0.0-windows.exe并解压
3.Qt5.12环境下读取图像并显示
我用的Qt5.12环境采用的编译器为VS2017,QT的pro文件配置主要要设置成C++ 17,注意包含的头文件和库文件。如下图所示:
bash
#CONFIG += c++11
CONFIG += c++17
SOURCES += \
main.cpp \
mainwindow.cpp
HEADERS += \
mainwindow.h
FORMS += \
mainwindow.ui
#Added By Lzy
# OpenCV5.0 路径,改成你本地实际路径
#OPENCV_PATH = D:/opencv480/build
OPENCV_PATH = D:/opencv500/build
INCLUDEPATH += $${OPENCV_PATH}/include
LIBS += -L$${OPENCV_PATH}/x64/vc16/lib \
#-lopencv_world480
-lopencv_world500部署推理的代码如下图所示
cpp
// 定义检测结果结构体
struct Detection {
int class_id;
float confidence;
cv::Rect box;
};
// 1. 参数配置
const std::string model_path = "Onnx/best.onnx";
const std::string image_path = "./11.jpg";
const float conf_threshold = 0.25f;
const float nms_threshold = 0.45f;
const cv::Size target_size(640, 640);
std::vector<std::string> class_names = {"Node"};
cv::dnn::Net net;
// 图像等比例缩放平铺(Letterbox)预处理,使检测更精准
cv::Mat letterbox(const cv::Mat& source, cv::Size target_size, cv::Scalar bg_color = cv::Scalar(114, 114, 114)) {
int col = source.cols;
int row = source.rows;
float _max = std::max(col, row);
cv::Mat result = cv::Mat::zeros(_max, _max, CV_8UC3);
result.setTo(bg_color);
source.copyTo(result(cv::Rect(0, 0, col, row)));
cv::Mat resized;
cv::resize(result, resized, target_size);
return resized;
}
//
static bool bFlag=true;
// 2. 加载模型 (OpenCV 5.0.0 深度优化了 readNet 引擎)
if(bFlag)
{
net = cv::dnn::readNet(model_path);
bFlag=false;
}
// 如果有 NVIDIA CUDA 环境,取消注释以下两行以开启硬件加速
// net.setPreferableBackend(cv::dnn::DNN_BACKEND_CUDA);
// net.setPreferableTarget(cv::dnn::DNN_TARGET_CUDA);
// 3. 读取并预处理图像
cv::Mat frame = cv::imread(image_path);
if (frame.empty()) {
std::cerr << "无法读取图像: " << image_path << std::endl;
return ;
}
// 缩放到 640x640
cv::Mat letterbox_img = letterbox(frame, target_size);
// 计算原始尺寸到缩放尺寸的比例,用于恢复坐标边界框
float scale = std::max(frame.cols, frame.rows) / 640.0f;
// 创建模型的输入 Blob (YOLO 标准:像素值除以 255.0,交换 R 与 B 通道)
cv::Mat blob;
cv::dnn::blobFromImage(letterbox_img, blob, 1.0 / 255.0, target_size, cv::Scalar(), true, false);
net.setInput(blob);
// 4. 前向推理
std::vector<cv::Mat> outputs;
net.forward(outputs, net.getUnconnectedOutLayersNames());
// 5. 解析输出 (YOLOv11 输出形状为 [1, 84, 8400])
cv::Mat raw_data = outputs[0];
raw_data = raw_data.reshape(1, raw_data.size[1]); // 变更为 84 x 8400 的 2D 矩阵
cv::transpose(raw_data, raw_data); // 转置为 8400 x 84
float* data = (float*)raw_data.data;
int rows = raw_data.rows; // 8400 个候选框
int dimensions = raw_data.cols; // 84 (4个坐标 + 80个类别置信度)
int num_classes = dimensions - 4;
std::vector<int> class_ids;
std::vector<float> confidences;
std::vector<cv::Rect> boxes;
for (int i = 0; i < rows; ++i) {
// 指向当前候选框的置信度起始位置
float* classes_scores = data + 4;
// 寻找最大置信度的类别
cv::Mat scores(1, num_classes, CV_32FC1, classes_scores);
cv::Point class_id_point;
double max_class_socre;
cv::minMaxLoc(scores, 0, &max_class_socre, 0, &class_id_point);
if (max_class_socre > conf_threshold) {
// 提取中心坐标及宽高 (x_center, y_center, width, height)
float cx = data[0];
float cy = data[1];
float w = data[2];
float h = data[3];
// 转换成左上角坐标,并映射回原图尺寸
int left = static_cast<int>((cx - 0.5 * w) * scale);
int top = static_cast<int>((cy - 0.5 * h) * scale);
int width = static_cast<int>(w * scale);
int height = static_cast<int>(h * scale);
class_ids.push_back(class_id_point.x);
confidences.push_back(static_cast<float>(max_class_socre));
boxes.push_back(cv::Rect(left, top, width, height));
}
data += dimensions; // 跳到下一个候选框
}
// 6. 执行非极大值抑制 (NMS) 过滤重叠框
std::vector<int> nms_indices;
cv::dnn::NMSBoxes(boxes, confidences, conf_threshold, nms_threshold, nms_indices);
// 7. 绘制检测框
for (int idx : nms_indices) {
cv::Rect box = boxes[idx];
float conf = confidences[idx];
int class_id = class_ids[idx];
// 边界限制,防止框超出图片范围
box.x = std::max(0, box.x);
box.y = std::max(0, box.y);
box.width = std::min(box.width, frame.cols - box.x);
box.height = std::min(box.height, frame.rows - box.y);
// 绘制目标框
cv::rectangle(frame, box, cv::Scalar(0, 255, 0), 2);
// 绘制置信度标签
std::string label =/* "Class " + std::to_string(class_id)*/ class_names[class_id]+ ": " + cv::format("%.2f", conf);
int baseLine;
cv::Size label_size = cv::getTextSize(label, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
cv::rectangle(frame, cv::Point(box.x, box.y - label_size.height), cv::Point(box.x + label_size.width, box.y + baseLine), cv::Scalar(0, 255, 0), cv::FILLED);
cv::putText(frame, label, cv::Point(box.x, box.y), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0), 1);
}
// 8. 展示与保存结果
//cv::imshow("YOLOv11 OpenCV5.0 C++ Detection", frame);
//cv::imwrite("result.jpg", frame);
//cv::waitKey(0);
QImage qImg = cvMat2QImage(frame);
QPixmap pix = QPixmap::fromImage(qImg);
// 自适应缩放,保持比例
pix = pix.scaled(ui->labelShow->size(), Qt::KeepAspectRatio, Qt::SmoothTransformation);
ui->labelShow->setPixmap(pix);运行效果如下:
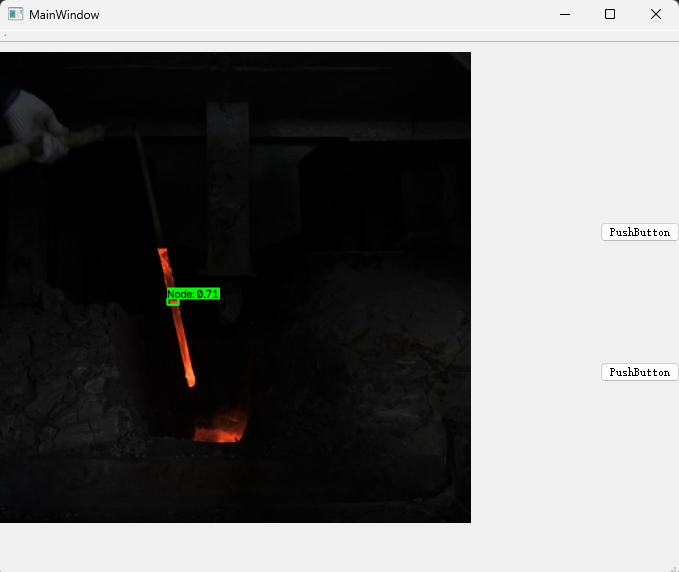
切换不同的OpenCV4.8.0和OpenCV5.0.0库编译及推理测试结果如下:
OpenCV4.8.0平均推理耗时421ms
OpenCV5.0.0平均推理耗时265ms
可见OpenCV5.0对推理速度进行了优化。