码率控制(Rate Control, RC)是视频编码器的核心模块之一,其核心任务是在满足特定信道带宽(Target Bitrate)和缓冲区限制(VBV Buffer)的前提下,通过合理分配每个图像组(GOP)、图像(Frame)以及编码单元(CU)的比特数,使重构视频的整体失真度(Distortion)达到最小。
在 H.264/AVC 时代,JVT-G012 等传统算法普遍采用 R−QR-QR−Q 模型 (如二次源模型 R=a1Q+a2Q2R = \frac{a_1}{Q} + \frac{a_2}{Q^2}R=Qa1+Q2a2)。该模型直接建立了码率 RRR 与量化参数 QQQ(或量化步长 QstepQ_{step}Qstep)之间的映射关系。然而,随着 H.265/HEVC 引入了更为灵活的块划分结构(从 64×6464\times6464×64 到 8×88\times88×8 的 RQT 树状划分),传统的 R−QR-QR−Q 模型暴露出两级致命缺陷:一是视频内容的复杂度(如纹理、运动)难以通过单一的经验参数准确描述;二是高阶残差分布的非线性极强,导致码率控制精度和率失真(R-D)性能大幅下滑。
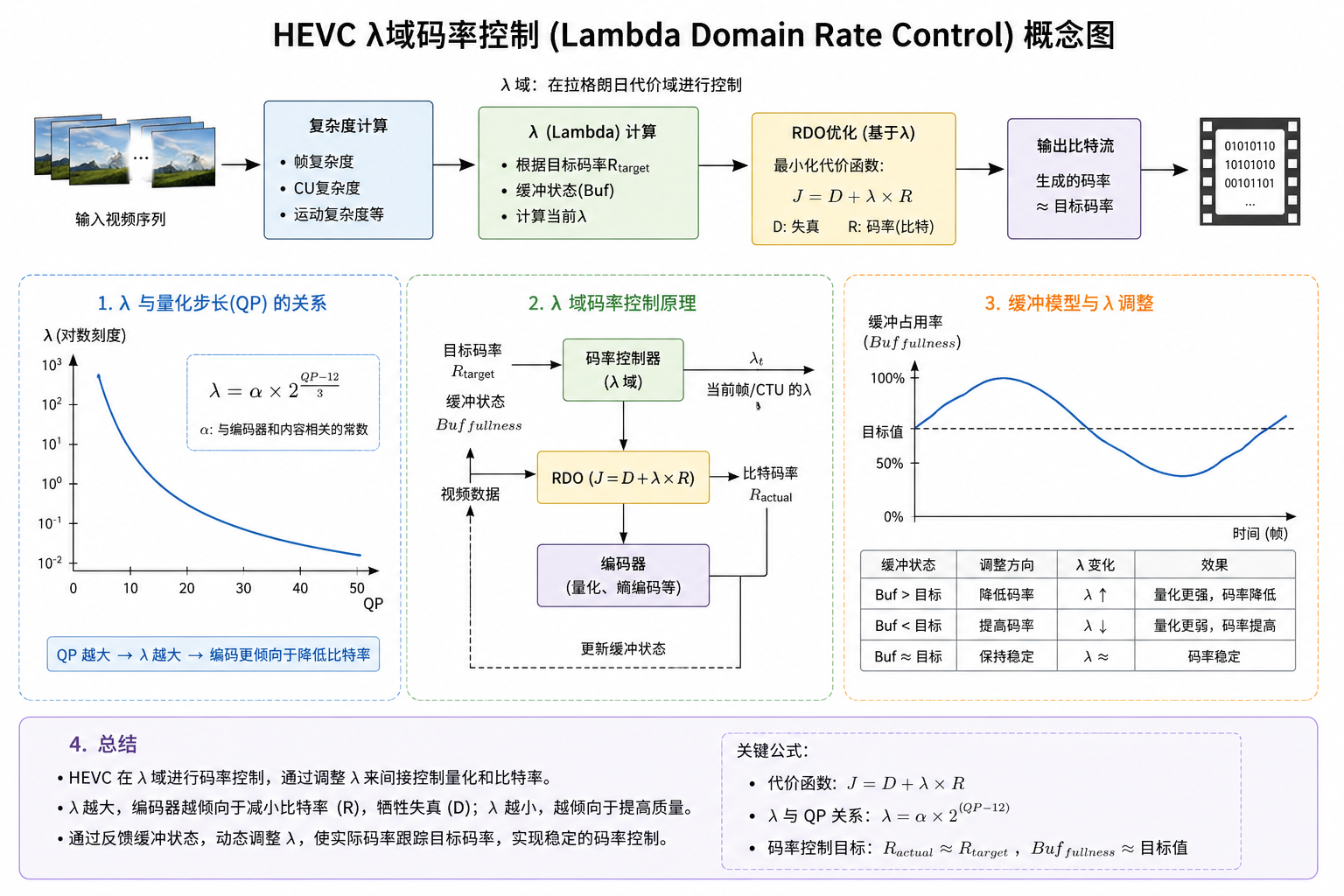
为了打破这一瓶颈,Li 等人提出了全新的 λ\lambdaλ 域码率控制算法 (其改进版本被 HEVC 官方参考软件 HM 采纳,即著名的 K0103 提案)。该算法彻底颠覆了以 QQQ 为核心的建模思路,转而以拉格朗日乘子 λ\lambdaλ 作为纽带,构建了更为稳健、精准的 R−λR-\lambdaR−λ 模型。
一图总结
λ\lambdaλ 域控制的核心数学理论
拉格朗日率失真优化(RDO)的本质
在视频编码中,最优编码模式的配置本质上是一个受限优化问题:
minDs.t.R≤Rtarget\min D \quad \text{s.t.} \quad R \le R_{\text{target}}minDs.t.R≤Rtarget
通过拉格朗日乘子法,可将其转化为无约束优化问题,即最小化率失真代价(R-D Cost):
J=D+λ⋅RJ = D + \lambda \cdot RJ=D+λ⋅R
式中,λ\lambdaλ 是 R-D 曲线上的绝对斜率:
λ=−∂D∂R\lambda = -\frac{\partial D}{\partial R}λ=−∂R∂D
从宏观经济学角度审视,λ\lambdaλ 象征着"比特的边际成本"。当 λ\lambdaλ 较大时,意味着每降低一单位失真需要付出高昂的比特代价,此时编码器倾向于分配较少的比特(牺牲质量以节省码率);反之,当 λ\lambdaλ 较小时,表明比特成本低廉,编码器会分配丰沛的比特以压榨失真。
R−λR-\lambdaR−λ 模型的推导
信息论与源编码理论表明,对于满足拉普拉斯或高斯分布的残差源,其率失真函数(R-D Function)在低码率下表现为指数衰减。λ\lambdaλ 域算法正是基于这一物理特性,构建了如下的双曲几何映射模型:
R=a⋅λbR = a \cdot \lambda^bR=a⋅λb
通过对两端求对数,可以将其线性化,便于参数解析与拟合:
lnR=lna+b⋅lnλ\ln R = \ln a + b \cdot \ln \lambdalnR=lna+b⋅lnλ
其中:
- RRR 代表当前编码层级(图像或 CU)分配到的目标比特(通常转化为每个像素的平均比特位 BPP, Bits Per Pixel)。
- λ\lambdaλ 为求解出的拉格朗日乘子。
- aaa 和 bbb 是与视频源内容复杂度高度相关的模型参数。参数 aaa 动态反映了图像的纹理丰富度与运动剧烈程度(内容复杂度越高,aaa 越大);参数 bbb 则表征了 R-D 曲线的斜率变化率,通常是一个负数(在 HM 中初始化接近 −1.95-1.95−1.95 左右)。
λ\lambdaλ 到 QPQPQP 的映射骨架
虽然该算法在代数计算和比特分配层级完全运行在 λ\lambdaλ 域,但 HEVC 底层硬件或熵编码最终执行时,仍需转换为合法的量化参数 QPQPQP。HM 内部固化了经典的 λ−QP\lambda - QPλ−QP 经验映射公式:
QP=C1⋅lnλ+C2QP = C_1 \cdot \ln \lambda + C_2QP=C1⋅lnλ+C2
在主流配置下,该公式通常体现为:
QP=4.2005⋅lnλ+13.7122QP = 4.2005 \cdot \ln \lambda + 13.7122QP=4.2005⋅lnλ+13.7122
解出 λ\lambdaλ 后,通过上式即可换算得到连续域的 QPQPQP,经四舍五入并实施边界裁剪(0∼510 \sim 510∼51)后,最终作用于变换系数的量化过程。
λ\lambdaλ 域码率控制的四层层次化架构
HEVC 的 λ\lambdaλ 域控制算法采用自上而下、层层递进的四级控制架构:GOP 级、图像(Frame)级、最大编码单元(LCU/CTU)级以及 CU 级(可选)。每一层依据上层下发的"资源包",结合本层的权重和特征进行二次微调与分配。
GOP 级别:宏观平滑与比特蓄水池
GOP 级别的核心目标是保证长期的码率平滑,防止由于视频切场或突发大运动导致缓冲区溢出或下溢。
- 可用比特初始化 :根据总带宽 RtargetR_{\text{target}}Rtarget、视频帧率 fff 以及当前虚拟缓冲区(SW-VBV)的充盈状态,计算当前 GOP 理论上分得的额度 BGOPB_{\text{GOP}}BGOP。
- 权重平衡 :引入前序 GOP 实际消耗比特与预期比特的偏差,对 BGOPB_{\text{GOP}}BGOP 进行负反馈修正。
图像级别(Frame Level):时域依赖与帧间精细分配
图像级是 λ\lambdaλ 域算法最具技术含量的层次。在 HEVC 层级 B 帧(Hierarchical B)预测结构中,不同时域层(Temporal Layer)的帧对后续帧的参考贡献度差异巨大。
帧间权重系数(wiw_iwi)与 λ\lambdaλ 调校
时域层越低(如 I 帧、P 帧、低层 B 帧),作为参考源的机会越多,其质量优劣会引发严重的误差漂移。因此,算法为不同类型的帧赋予了独特的时域权重 wiw_iwi。图像级的目标比特 BframeB_{\text{frame}}Bframe 分配满足:
Bi=BGOP⋅wi∑wjB_i = B_{\text{GOP}} \cdot \frac{w_i}{\sum w_j}Bi=BGOP⋅∑wjwi
在计算出单帧目标码率后,依据 R=a⋅λbR = a \cdot \lambda^bR=a⋅λb 变形求得该帧的基准拉格朗日乘子:
λbase=(Rframea)1b\lambda_{\text{base}} = \left( \frac{R_{\text{frame}}}{a} \right)^{\frac{1}{b}}λbase=(aRframe)b1
为了进一步拉开参考帧与非参考帧的质量梯次,算法引入了时域调节系数 α\alphaα:
λframe=α⋅λbase\lambda_{\text{frame}} = \alpha \cdot \lambda_{\text{base}}λframe=α⋅λbase
通常,关键参考帧(如 Temporal Layer 0)的 α\alphaα 较小,导致求出的 QPQPQP 较低,图像质量极高;而非参考帧的 α\alphaα 较大,质量稍低,从而最大化整体的时域编码增益。
LCU/CTU 级别:空域自适应与像素级比特微调
单张图像内部不同区域的复杂度大相径庭(例如:静态背景与激烈运动的人脸)。LCU 级码率控制负责在图像内部倾斜资源。
- MAD 纹理预测:利用前一帧对应位置 LCU 的平均绝对残差(MAD)作为空域复杂度的代理指标。
- 局部比特分配 :计算当前 LCU 的复杂度在全帧所有 LCU 总复杂度中的占比,据此切割 BframeB_{\text{frame}}Bframe 得到 BLCUB_{\text{LCU}}BLCU。
- LCU 级 λ\lambdaλ 求解 :依托相同的 R−λR-\lambdaR−λ 模型,代入 BLCUB_{\text{LCU}}BLCU 及该 LCU 特有的参数 aLCU,bLCUa_{\text{LCU}}, b_{\text{LCU}}aLCU,bLCU,求解出局部的 λLCU\lambda_{\text{LCU}}λLCU,进而转换为每个 CTU 专属的 QPQPQP。
参数更新与闭环反馈机制(Model Updating)
R−λR-\lambdaR−λ 模型中的 aaa 和 bbb 并非静态常数,而是随着视频内容的推进呈现非线性演进。λ\lambdaλ 域算法的成功,很大程度上得益于其高度灵敏且鲁棒的在线参数更新机制。
动态滑动窗口与一阶线性滤波
当一个图像或 LCU 编码完成后,其实际消耗的比特数 RactualR_{\text{actual}}Ractual 以及在 RDO 中实际使用的 λactual\lambda_{\text{actual}}λactual 便确定了。系统会将这一组真实的 (Ractual,λactual)(R_{\text{actual}}, \lambda_{\text{actual}})(Ractual,λactual) 数据点反向代入模型,与原参数进行对数域的线性平滑滤波更新。
更新公式一般呈现如下形式:
lnanew=lnaold+ka⋅(lnRactual−lnRpred)\ln a_{\text{new}} = \ln a_{\text{old}} + k_a \cdot \left( \ln R_{\text{actual}} - \ln R_{\text{pred}} \right)lnanew=lnaold+ka⋅(lnRactual−lnRpred)
bnew=bold+kb⋅(lnRactual−lnRpred)b_{\text{new}} = b_{\text{old}} + k_b \cdot \left( \ln R_{\text{actual}} - \ln R_{\text{pred}} \right)bnew=bold+kb⋅(lnRactual−lnRpred)
其中 kak_aka 和 kbk_bkb 为学习率(HM 中通常设为 0.10.10.1 左右的微小步长)。这种设计既确保了模型能够快速适应突发性的场景切换(如闪光灯、切场),又避免了由于个别坏点引起参数震荡。
边界约束与安全限制(Clamping)
为了防止系统在极端低码率或极复杂场景下由于模型失真导致"锁死"或"崩盘",算法在各个层级都锁定了严格的边界红线:
- QPQPQP 阶跃限制 :相邻帧之间、或同一帧内相邻 LCU 之间的 QPQPQP 变化量通常被严格限制在 ±1\pm 1±1 或 ±2\pm 2±2 以内,防止视觉上出现肉眼可见的闪烁(Flicker 效应)或块效应。
- 参数范围约束 :参数 bbb 必须严格限制在负数区间(如 −3.0,−0.5-3.0, -0.5−3.0,−0.5),一旦超出则强制复位。
λ\lambdaλ 域算法的关键优势与技术局限性
核心优势
- 极高的码率控制精度(Rate Accuracy) :相比 H.264 的 R−QR-QR−Q 模型,λ\lambdaλ 域算法的码率控制误差通常可以控制在 1%1\%1% 以内,极少发生突发性的码率冲高或下溢。
- 卓越的 R-D 性能(R-D Optimization Alignment) :由于直接在 λ\lambdaλ(拉格朗日斜率)这一决定 R-D 最优解的本源变量上做文章,它使得码率分配与底层的 RDO 过程达到了数学逻辑上的高度统一,比传统算法能榨取更高的 BD-Rate 增益。
- 时域分层完美契合:完美适配 HEVC 复杂的时域参考拓扑结构,彻底解决了多层 B 帧下比特分配失衡的顽疾。
潜在瓶颈与局限
- 对突发场景切换(Scene Cuts)响应存在滞后 :由于参数更新严重依赖历史编码数据的统计特性,当遭遇毫无预兆的非全 I 帧场景切场时,历史参数 (a,b)(a, b)(a,b) 失效,往往导致切场首帧码率暴涨或画面瞬间马赛克。
- LCU 级视觉感知不均匀 :纯粹基于数学和信息论的 R−λR-\lambdaR−λ 模型并未融入人眼视觉系统(HVS)特性的感知模型。在平坦区域(如天空、纯色墙面),人眼对噪声极度敏感,而该算法可能会为了满足全局 R-D 最优而过度压榨平坦区的比特,产生视觉视觉瑕疵。
- 计算鲁棒性对首帧敏感 :初始帧的 a,ba, ba,b 参数设置通常依赖经验硬编码。若初始参数与实际输入的视频流风格严重背离,系统往往需要经历数个 GOP 的收敛期才能回到正轨。
总结
HEVC 的 λ\lambdaλ 域码率控制算法通过引入拉格朗日乘子作为核心控制变量,成功解耦了复杂的码率与量化参数之间的间接物理关系,建立了典雅而高效的 R−λR-\lambdaR−λ 数学映射。它通过四级递进的控制链条,配合灵敏的闭环反馈调节,在 HM 和实际商用编码器中展现了统治级的控制精度。
随着视频技术的向前演进(如 VVC/H.266 标准的落地、HDR 高动态范围视频的普及),现代前沿的码率控制研究正沿着两个方向对经典的 λ\lambdaλ 域算法进行反哺与迭代:一是融合深度学习与生成式 AI ,利用神经网络提前精准预测当前帧的 a,ba, ba,b 模型初始值,从而彻底消灭场景切换时的时延滞后;二是深度耦合感知码率控制(Perceptual RC) ,将时空域的主观显著性权重(Saliency Map)直接注入到 LCU 级的 λ\lambdaλ 计算公式中,实现"在肉眼关注区堆砌比特,在视觉盲区精简资源"的更高境界。