目录
[4.1 RCNC鲁棒控制核心模块](#4.1 RCNC鲁棒控制核心模块)
[4.2 三阶参数辨识模块](#4.2 三阶参数辨识模块)
[4.3 ABCD受控对象系统与扰动叠加环节](#4.3 ABCD受控对象系统与扰动叠加环节)
[4.4 状态观测与双路对比模块](#4.4 状态观测与双路对比模块)
✨1.课题概述
这套伺服控制系统面向高精度运动控制场景,以RCNC鲁棒闭环控制模块作为主控核心,搭配三阶参数辨识模块、ABCD受控对象系统、多源扰动叠加环节、双路对比观测模块,构建了兼具轨迹跟踪、在线参数辨识、主动扰动抑制三重能力的闭环伺服架构。系统核心目标是跟踪SignalRef给出的位置/速度参考轨迹,保证稳态与动态跟踪精度;通过三阶参数辨识模块实时拟合伺服系统内部动力学参数,修正控制策略;通过前馈+反馈复合结构抑制外部Disturbance扰动、参数摄动扰动,最终实现位置环(PositionCmp)与速度环(SpeedCmp)的双闭环高精度控制。
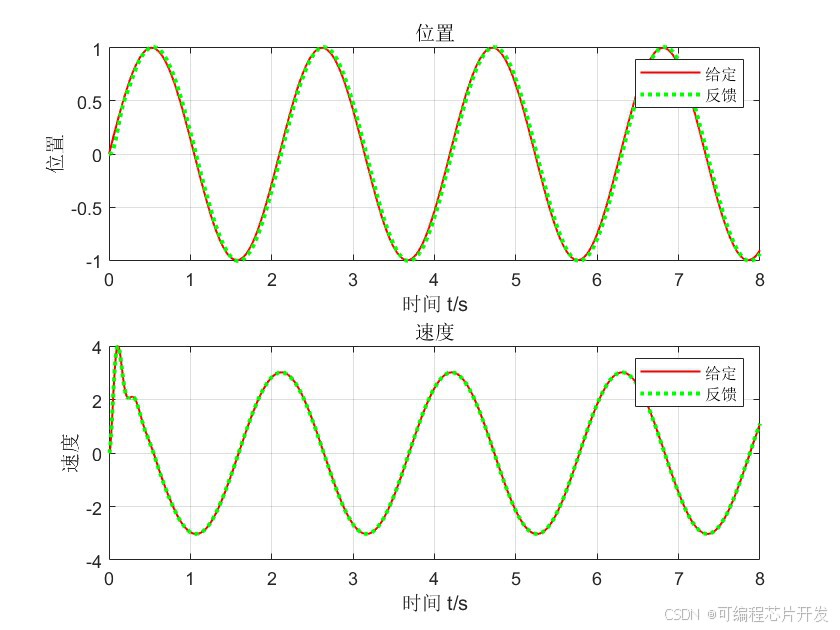
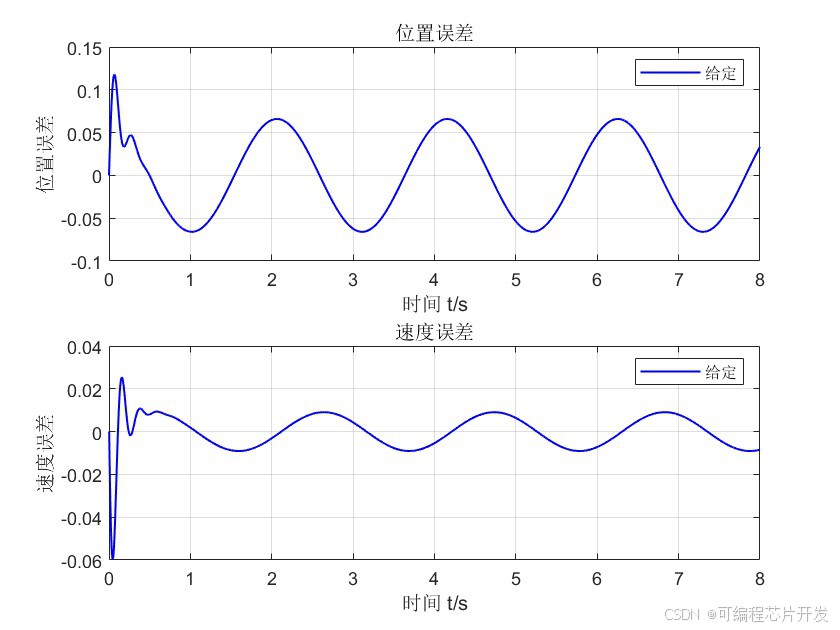
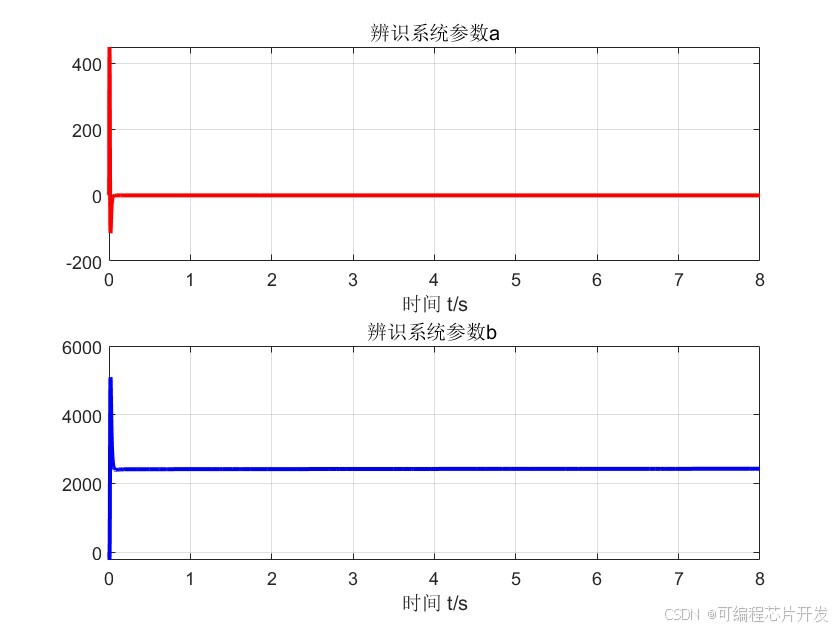
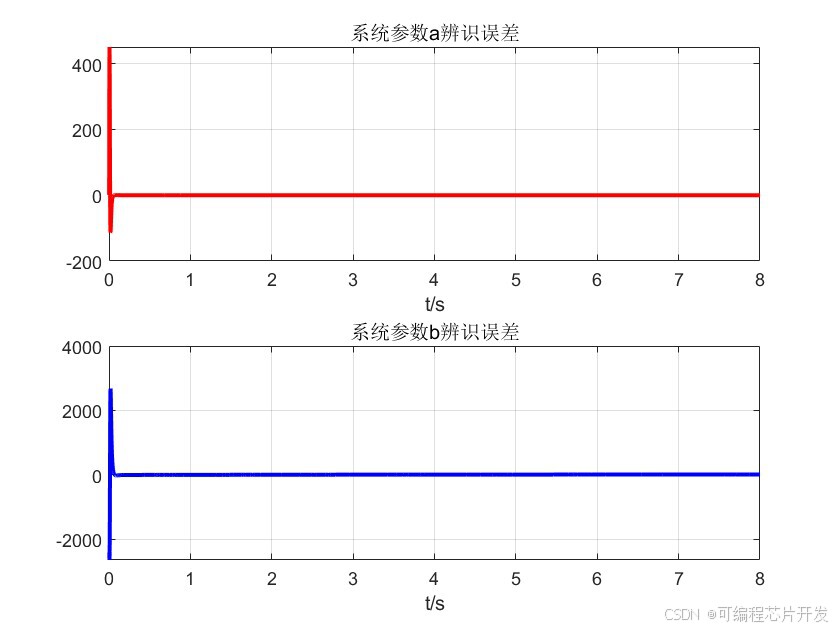
📊2.系统仿真结果
✅3.核心程序或模型
%系统的其他参数设置
T = 2e-3;
b = 2436;
a = -1.08;
r = 2;
umax = 1.2;
%扰动增益系数
Gd = 1;
%计算时用的中间变量
j = exp(a*T)-1 ;
i = 1/a;
%按采样周期T进行基于零阶保持器离散化后带有阻尼的双积分系统模型的参数
A = [1 i*j;0 j+1];B=[b*i^2*j-b*i*T;b*i*j];C=[1 0];D=0;
%线性反馈控制律参数
zeta = 0.3;
wn = 30;
f1 =(2*exp(-zeta*wn*T)*cos(wn*T*sqrt(1-zeta^2))-exp(-2*zeta*wn*T)-1)/(b*i*T*j);
f2 =(2*exp(-zeta*wn*T)*cos(wn*T*sqrt(1-zeta^2))-2-j-(b*i^2*j-b*i*T)*f1)/(b*i*j);
G =-f1;
F = [f1 f2];
%非线性反馈控制律参数
W = T*eye(2);
alpha= 4;
beta = 0.5;
if abs(r)>0
alpha0=1/abs(2);
else
alpha0=1;
end🚀4.系统原理简介
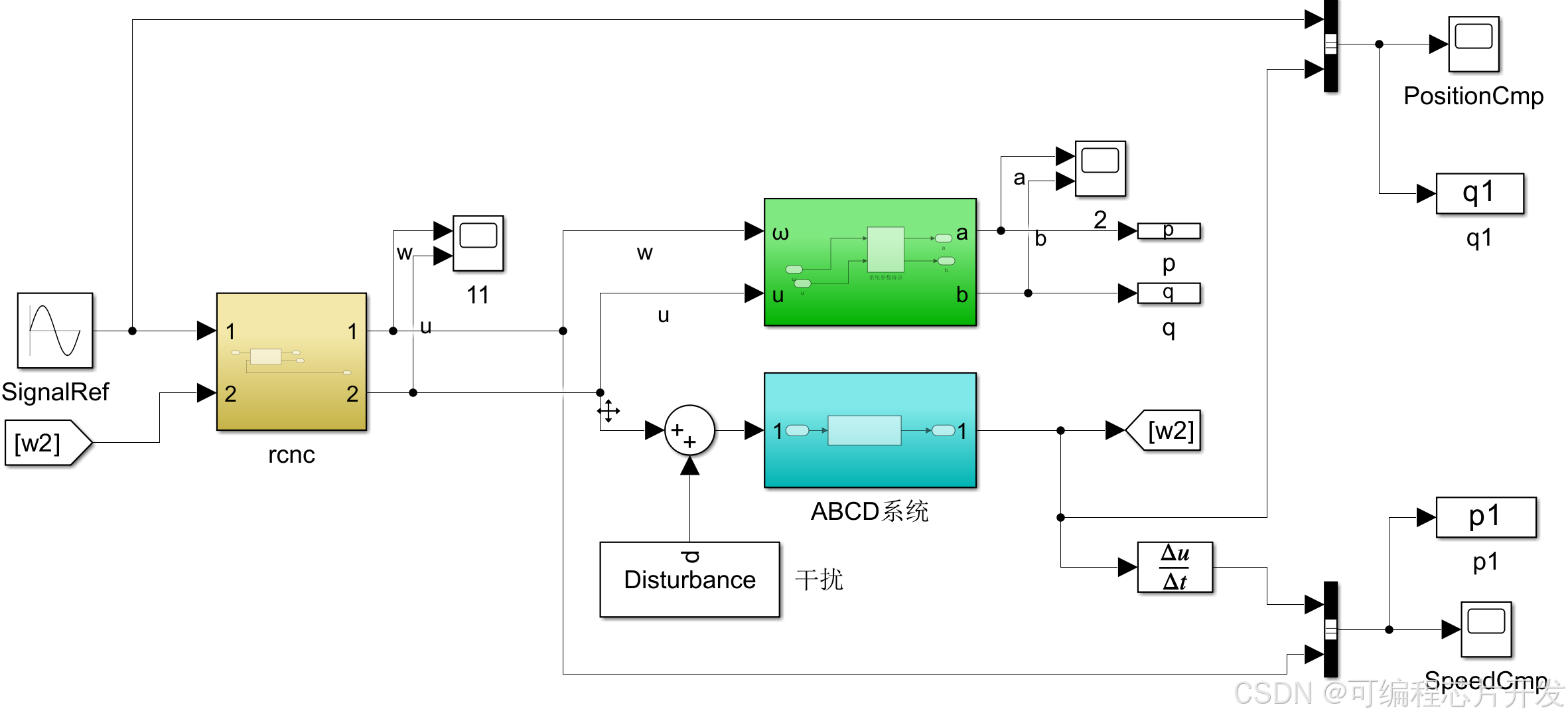
整体信号流向分为两条主线:参考指令生成与主控调节主线、参数辨识与状态观测主线、扰动叠加与对象控制主线,三条主线互相耦合形成闭环:SignalRef轨迹参考与[w2]辅助参考输入送入 RCNC模块,输出控制量w、u;w、u一方面送入三阶参数辨识模块完成系统动力学参数在线识别,另一方面u叠加外部扰动后送入ABCD受控系统产生实际运动状态;实际运动状态反馈回 RCNC输入端形成闭环修正,同时运动状态的位置、速度信息分两路送入对比观测模块,实现参考与实际轨迹的偏差监测。
4.1 RCNC鲁棒控制核心模块
RCNC是系统的主控运算单元,具备双输入双输出结构:输入1为 SignalRef 周期轨迹参考信号r(t),输入2为辅助参考信号w2(t);输出 1 为参数辨识激励信号w(t),输出2为面向ABCD对象的基础控制量u0(t)。
控制律
RCNC采用鲁棒复合控制架构,融合前馈补偿与闭环反馈调节,基础控制律表达式为:

式中:Kf为速度前馈系数,利用参考轨迹微分提前补偿伺服惯性滞后;Kp、Ki分别为位置反馈比例、积分系数,消除位置静差ep(t)=r(t)−q1(t);Ka为辅助参考增益,适配[w2]给出的工况辅助指令。同时为三阶参数辨识模块提供专用激励w(t),激励信号满足持续激励条件:

保证三阶辨识算法可以收敛得到唯一的系统参数解,避免辨识陷入局部最优。
闭环反馈
RCNC 接收末端位置反馈q1(t)(PositionCmp 输出的实际位置)和速度反馈p1(t)(SpeedCmp输出的实际速度),形成位置-速度双环反馈修正项:

最终送入加法器的原始控制量为u0(t)+Δufb(t),后续再叠加外部扰动形成 ABCD 系统的实际输入。
4.2 三阶参数辨识模块
该模块是系统智能化的核心,采用三阶线性动力学模型拟合伺服被控对象,实现在线递推参数辨识,输入为RCNC输出的激励w(t)、控制量u(t),输出辨识得到的系统状态参数a(t)、b(t),对应三阶模型的系数矩阵与状态变量。
三阶系统基准模型
伺服机械传动环节的三阶标准动力学形式为:

式中x(t)为伺服机械位移,a0,a1,a2为系统惯性、阻尼、刚度对应的待辨识极点参数,b0,b1,b2为控制输入增益对应的待辨识零点参数,这三组参数构成三阶辨识的核心求解量。
递推最小二乘RLS辨识实现
模块采用带遗忘因子的递推最小二乘算法适配时变工况,先将三阶微分方程转化为离散回归形式:
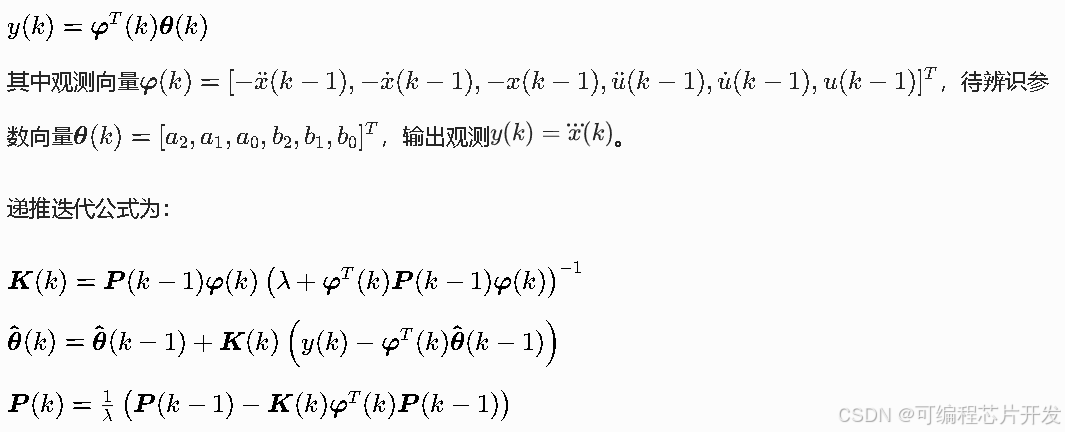
λ∈(0.9,0.99)为遗忘因子,弱化过往旧数据权重,适配负载变化导致的参数慢时变特性。模块输出的a、b就是迭代得到的a^i、b^i序列,可实时回传给RCNC模块修正控制参数,实现自适应控制。
4.3 ABCD受控对象系统与扰动叠加环节
ABCD系统是伺服系统的物理被控对象(电机+传动机构一体化模型),输入为叠加扰动后的控制量utotal(t),数学上是由辨识三阶模型对应的状态空间实现:

式中A,B,C就是三阶辨识模块输出a、b拟合得到的ABCD矩阵,实现辨识结果和被控对象的模型匹配。扰动叠加环节采用加法器完成多扰动融合:

4.4 状态观测与双路对比模块
系统设置了两套独立的对比观测体系,实现分层误差监测:
位置对比支路PositionCmp:接收辨识模块输出的位置预估量q和实际系统输出位置q1,计算位置偏差eq(t)=q(t)−q1(t),用于校验参数辨识模型和真实机械结构的位置动力学偏差;
速度对比支路SpeedCmp:对ABCD系统输出做微分Δu/Δt得到实际加速度,积分得到实际速度p1,和辨识模块输出速度预估值p对比,计算速度偏差ep(t)=p(t)−p1(t),校验速度动态辨识精度;两路示波器可以实时绘制参考轨迹、辨识预估轨迹、实际轨迹三条曲线,直观评估扰动抑制效果和参数辨识收敛情况。
💢5.完整工程文件
v v
关注后,GZH回复关键词:a49