1 光机原理

主要的技术还是光波导,因为这一篇也不是讲光波导的,所以只是简单说一下原理就行了。
目前,本质是一个投影,然后通过镜片反射到人眼区域。
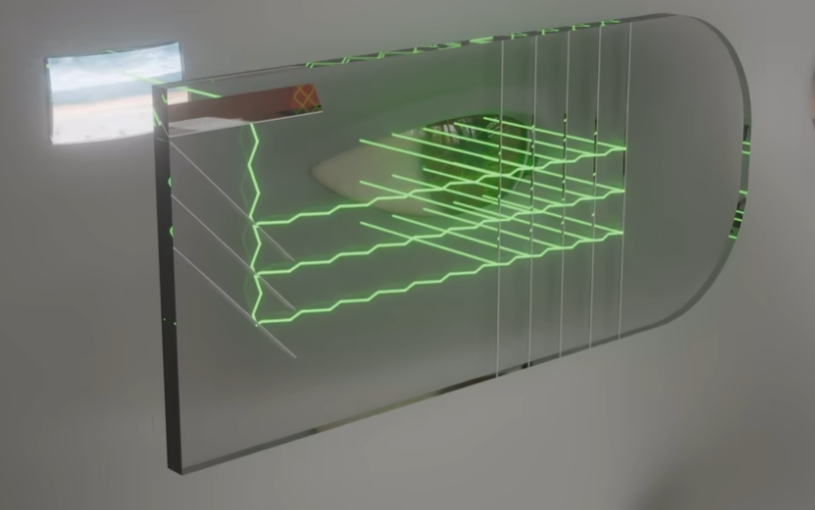
中间可能有什么扩瞳之类的技术,但是这个不重要,因为这个是光学工程师的事情。作为BSP来说,这里就关心投影的原始画像就是MicroOLED提供,所以只要能连接好MicroOLED,让它能驱动起来就行了。
2 整体介绍
查了一下AI,说是索尼的ECX335C是目前最经典的,MicroOLED模组。但是现在索尼基本上没有公开Datasheet,所有只有简单找了一个,也不知道行不行。
https://www.scribd.com/document/800148197/1-YYMMDD-ECX335AF-E-ver-1-4-LVDS-65121
关于ECX335C的基本情况如下:
主动矩阵颜色OLED。分辨率是标准的1920 * 1080,支持高达 100,000:1 的对比度。它的接口和控制逻辑非常标准,是学习微显示器驱动的"教科书"。一共81个Pin脚。
基本特性:
大概就是尺寸,分辨率,对比度,色宽这些。
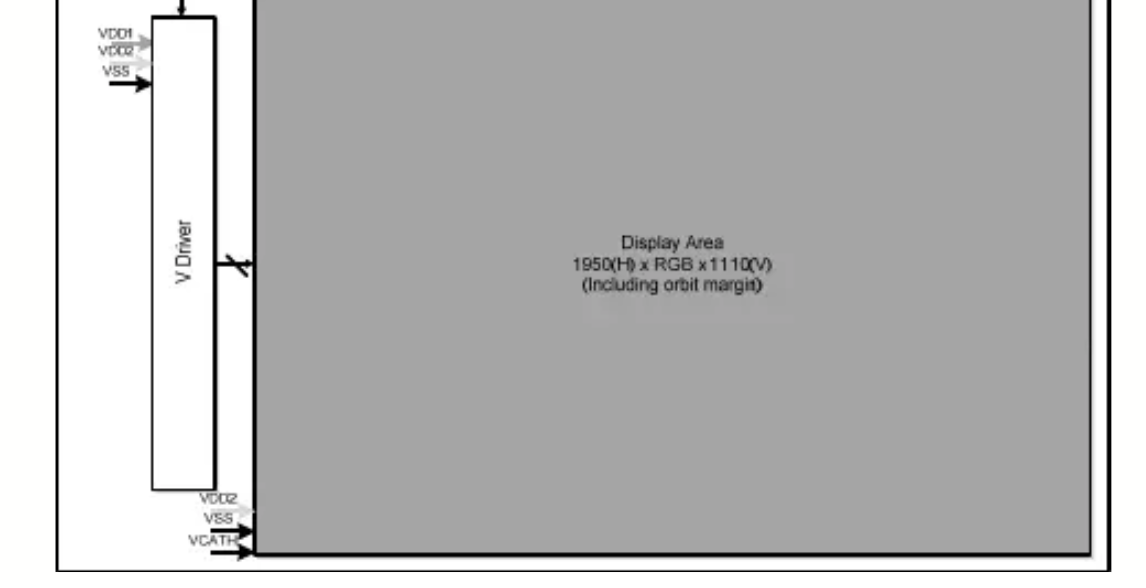
3 系统框图
因为原图比较长,所以分成两部分。
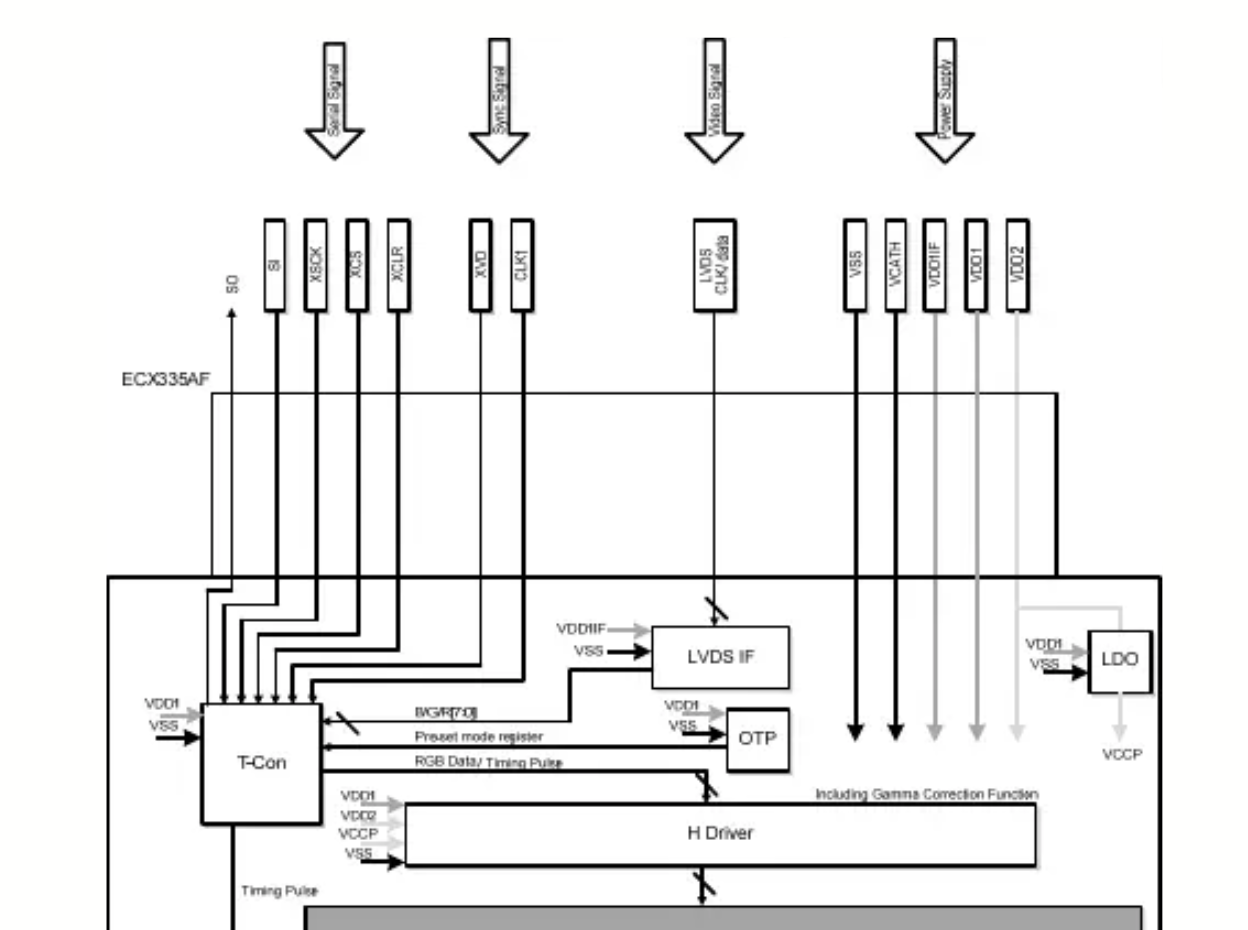
原图确实有些看的不大清楚,大致瞅瞅大概是以下几组:
1 Serial Signal(串行控制流)
主要是负责初始化寄存器。基本上就是3-Wire/4-Wire SPI接口。有以下接口。
-
SO(Serial Output):串行数据输出。 -
SI(Serial Input):串行数据输入。 -
XSCK(Serial Clock):串行时钟信号。 -
XCS(Chip Select):芯片选择引脚,低电平有效。 -
XCLR(Clear/Reset):硬件复位引脚。
2 Sync Signal(同步控制流)
这里主要是负责掌握行场时序。这个引脚用来跟主控 SoC 进行视频帧同步。比如在智能眼镜中,它确保两块微显示器(左右眼)能够同步刷新,或者跟 SLAM 摄像头的曝光时间对齐,防止双眼画面不同步导致眩晕。
-
XVD(Vertical Display Sync):垂直显示同步信号(类似于标准视频里的VSYNC)。 -
CLK1(System Clock 1):系统基准时钟输入。
3 Video Signal(视频高速数据流)
这个就是数据流了。使用的LVDS接口,不过现在应该都是MIPI了。SoC 的显示引擎(Display Engine)会将像素数据变成高频差分信号,通过这一组引脚源源不断地送给屏幕。
4 Power Supply(多轨电源流)
这部分主要是负责屏幕供电,在这里需要特别注意上电时序。
-
VSS:数字/模拟地(GND)。 -
VCATH(Cathode Power Supply):阴极电压,这通常是一个负电压(-4V左右),用来加速 OLED 像素的熄灭,提升动态对比度。 -
VDD1IF(Interface Power Supply):接口逻辑电压,标准 1.8V,用来给 SPI、LVDS 等数字通信部分供电。 -
VDD1(Digital Power Supply):内部核心数字电压,通常是 1.2V 或 1.8V。 -
VDD2(Analog Power Supply):模拟驱动高压,通常在 10V 左右,专门负责给 OLED 发光二极管提供高亮度所需的驱动能量。
所有的管脚都是最后集成在一个FPC,柔性电路板里面。下面是Pins的详细管脚定义:
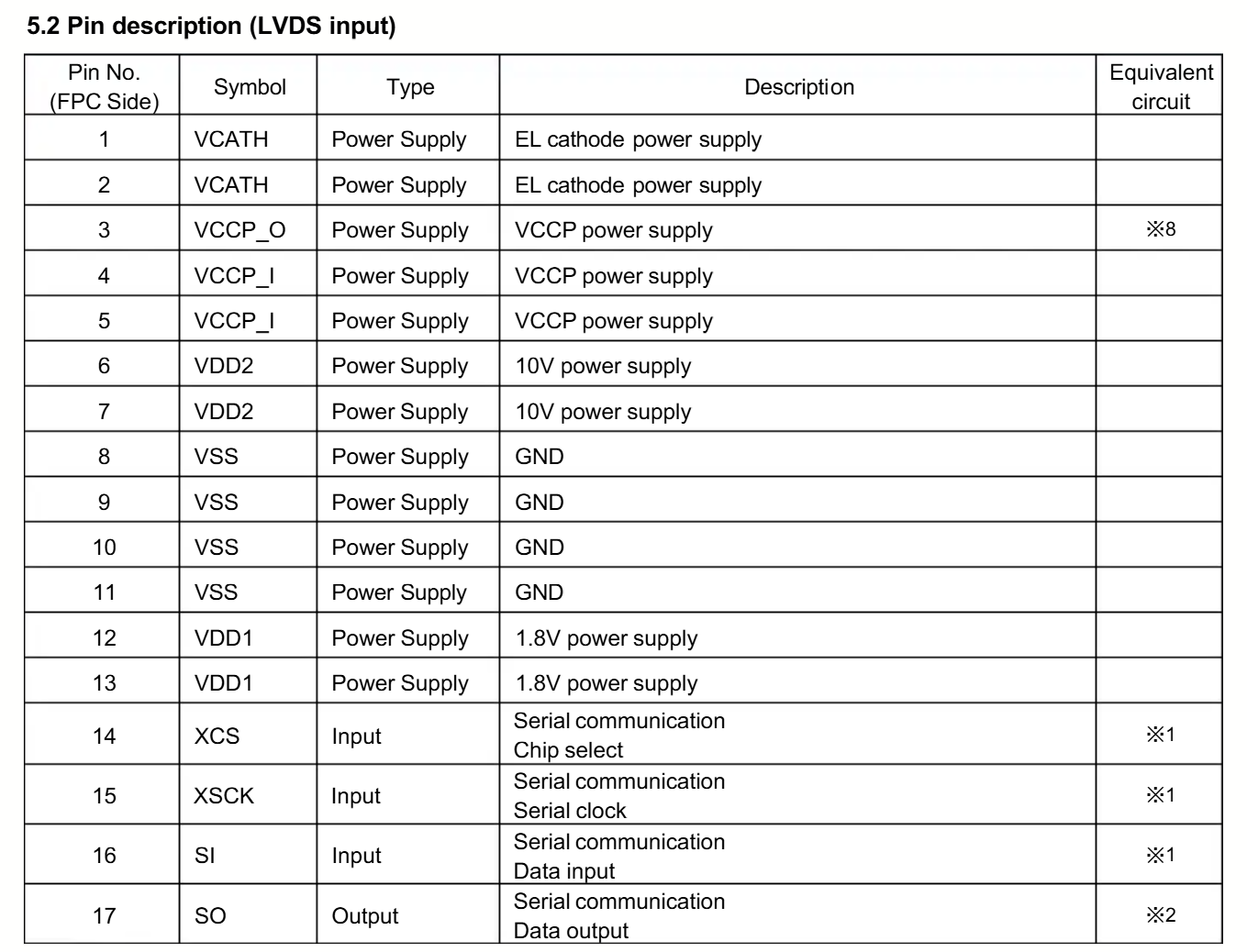
。。。
这里面最多的就是LVDS的部分,其它的也不少一共81个,这里就不全部列出来了。
下面是外围接口电路怎么弄。
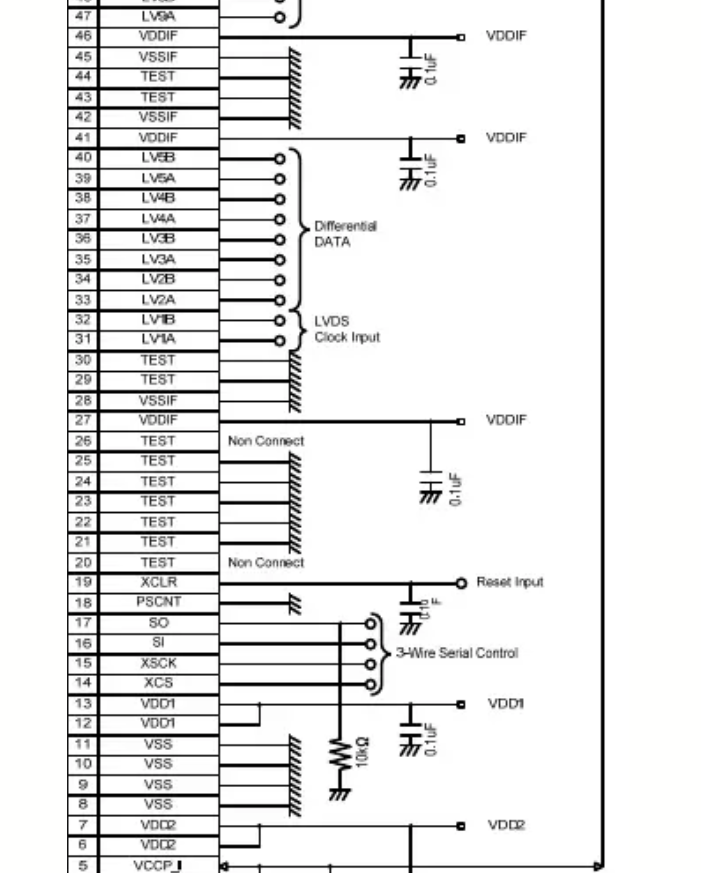
因为我主要还是关注软件,所以这部分我就不细看了。
之后是对供电的部分的具体要求。
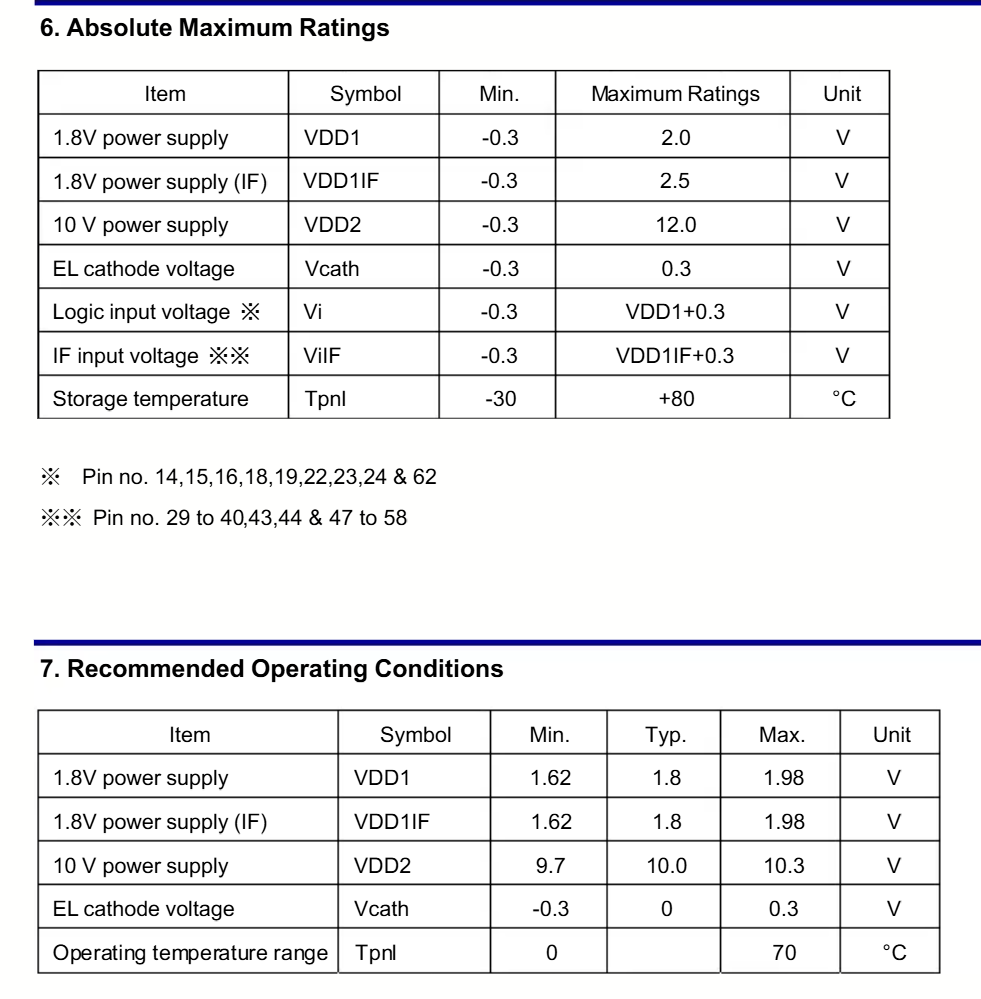
下面还有一些电气特性,这里就不详细看了。
4 供电
整个光机的供电时序略为复杂的。
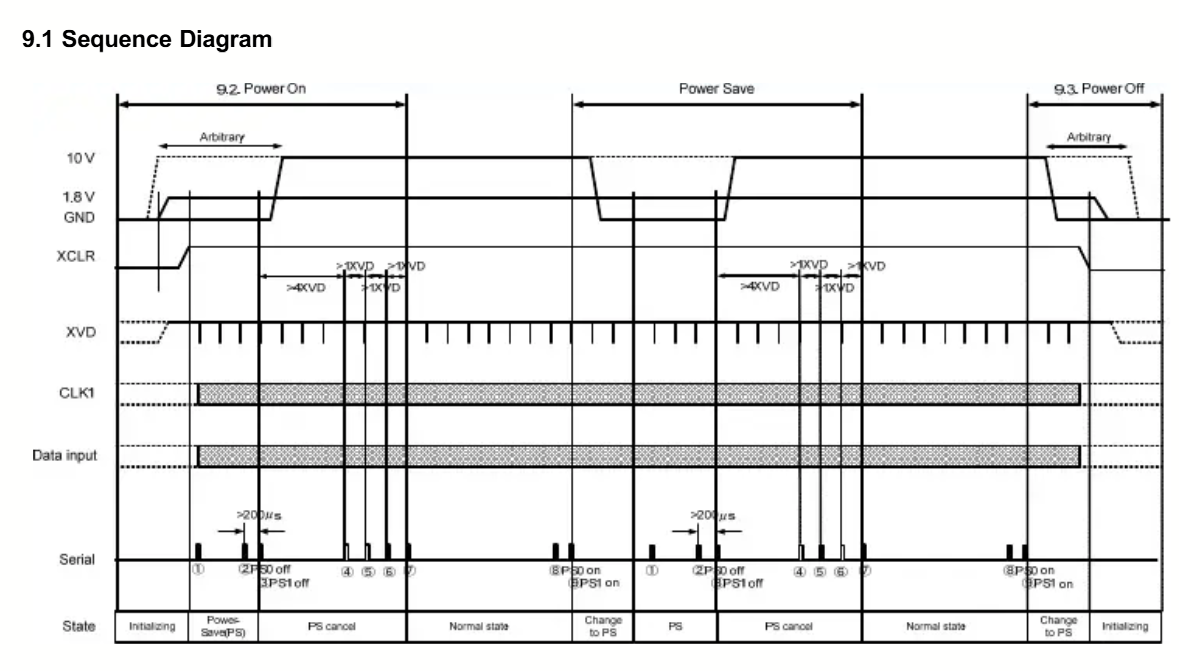
后面对于开机,待机,关机都有详细说明,这里就不细看了哈。
5 软件控制
首先就还是介绍了寄存器的用法。
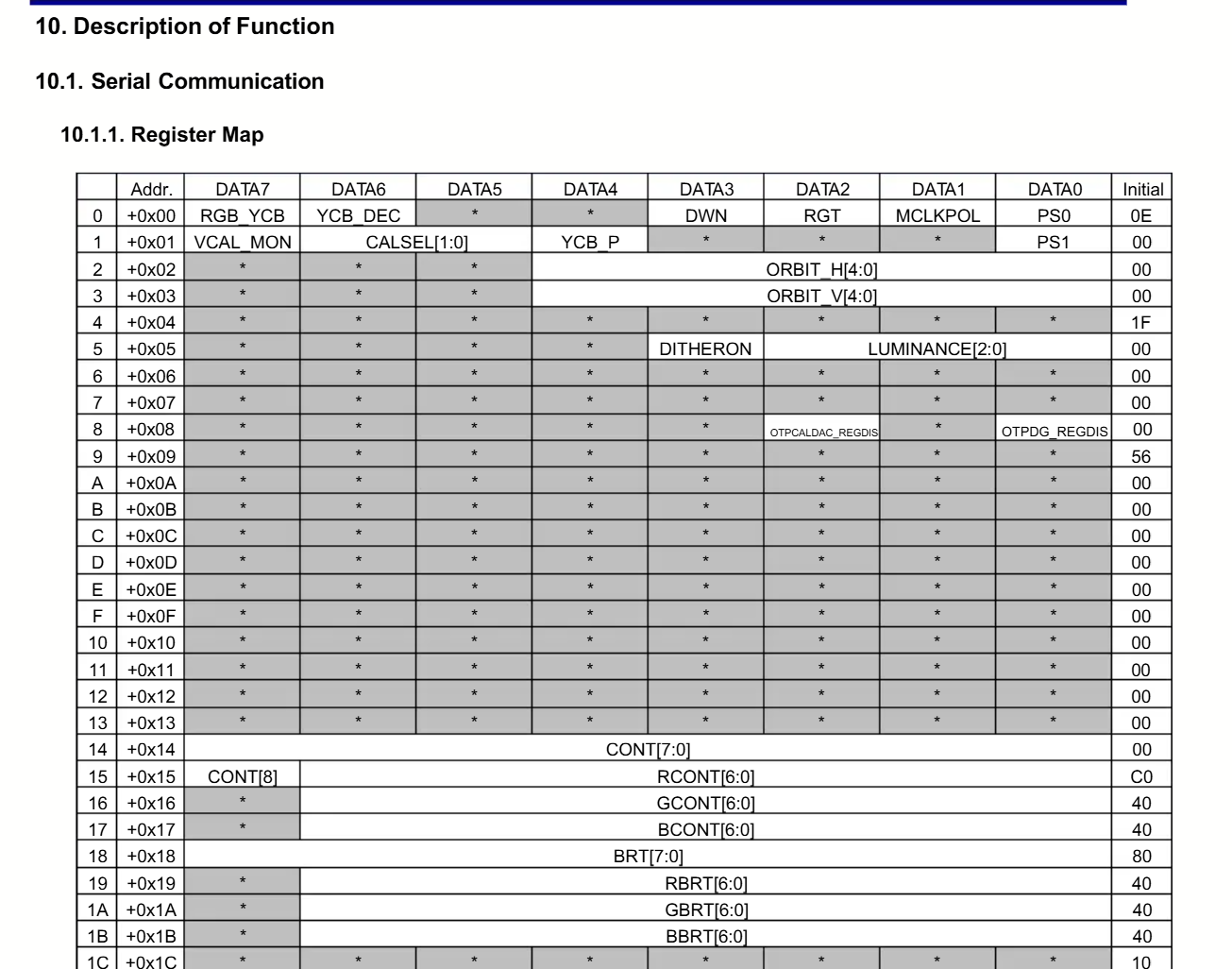
。。。

这里一行就是一个byte。整个部分从0到0x81,一共129个byte。
下面是对寄存器的详细描述。
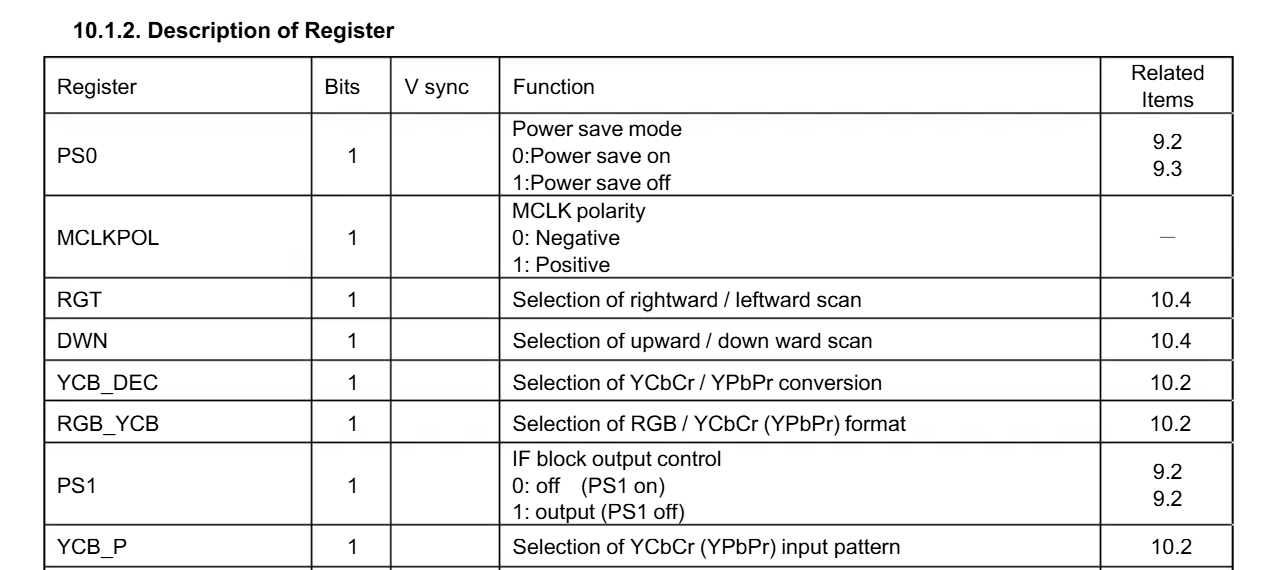
。。。。。。
跟着是指导如何进行串口通信。
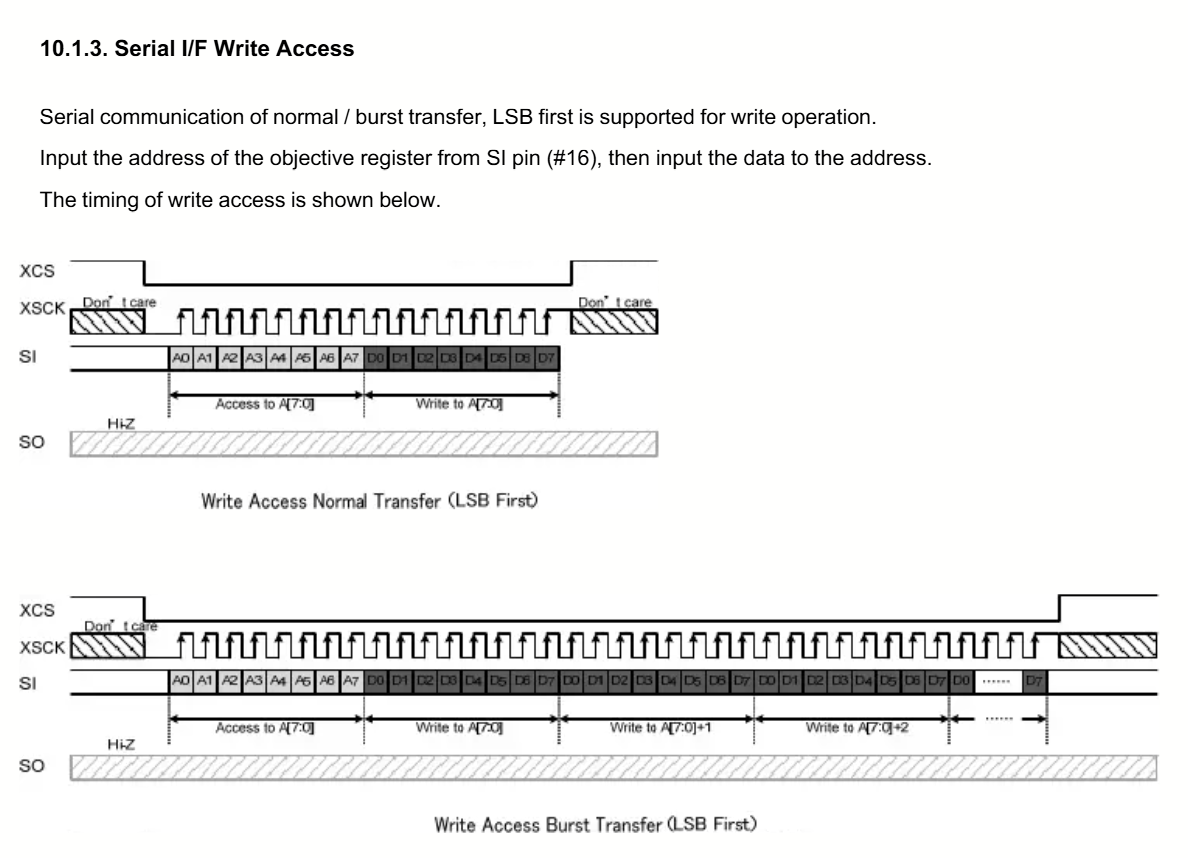
这部分还有一些细节,就不多说了。
下面看看具体的线路连接。从介绍上看说是Serial communication(串行通信),但这里实际上并不是,这个是SPI(串行外设接口)总线。
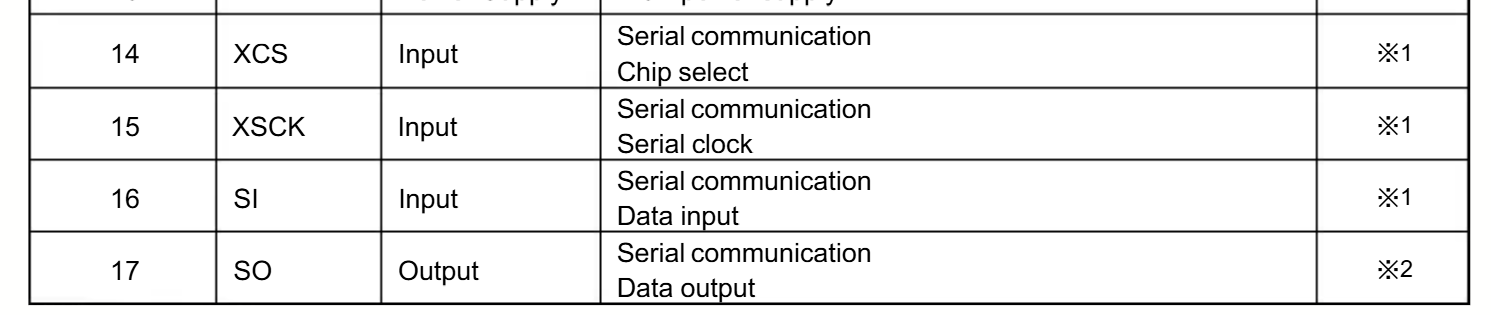
具体说明如下:
| 引脚名称 | 完整功能 | 在标准 SPI 里的通用名字 | 它是干什么的? |
|---|---|---|---|
XCS |
Chip Select (输入) | CS / SS | 片选线。因为一条 SPI 总线上可以挂多个外设,主控(树莓派)必须拉低这个引脚,这颗屏幕才会开始"听电话"。 |
XSCK |
Serial Clock (输入) | SCLK / SCK | 时钟线。由主控提供脉冲,决定数据传输的节拍(速度)。UART 没有时钟线,所以需要对齐波特率;而 SPI 有时钟线,属于同步通信。 |
SI |
Serial Input (输入) | MOSI (Master Out Slave In) | 数据输入。主控(树莓派)通过这条线把寄存器配置数据写进屏幕(类似于 UART 的 RX)。 |
SO |
Serial Output (输出) | MISO (Master In Slave Out) | 数据输出。当你想读取屏幕内部的状态码或者 ID 时,屏幕通过这条线吐数据给主控(类似于 UART 的 TX)。 |
6 视频传输
首先是描述了传输的格式,这里主要是描述怎么传输。
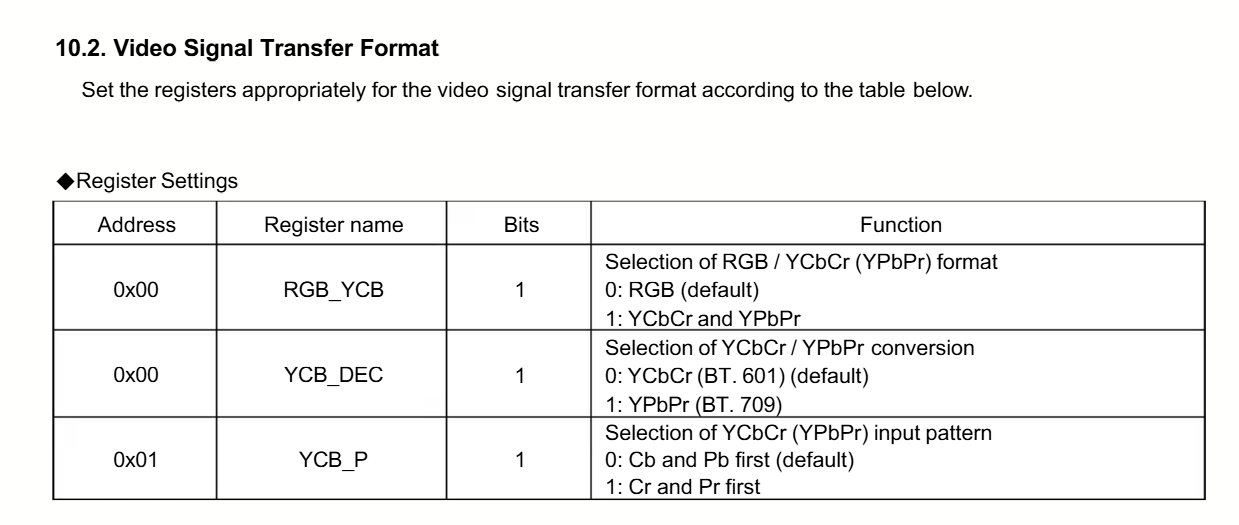
下面还对每个格式有具体的解释,就不多看了。
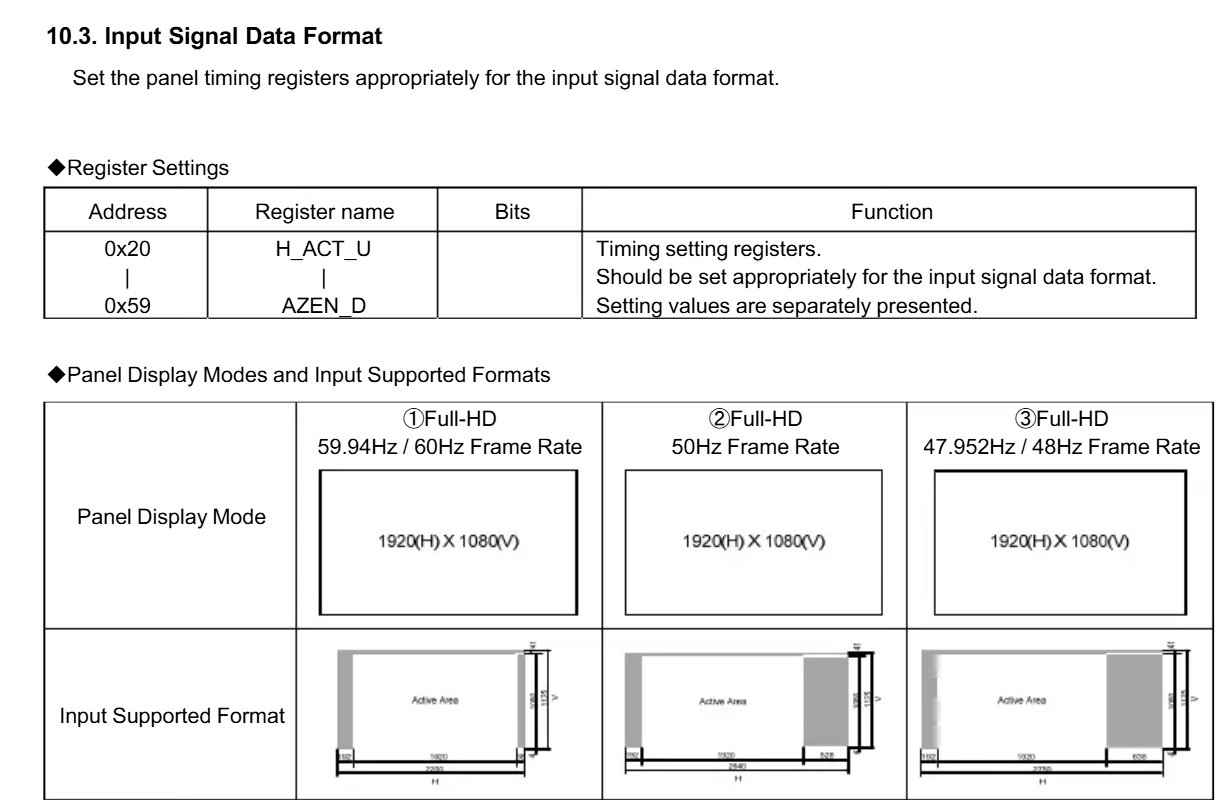
然后是输入的信号格式。这里主要描述了要输入的各种信号。
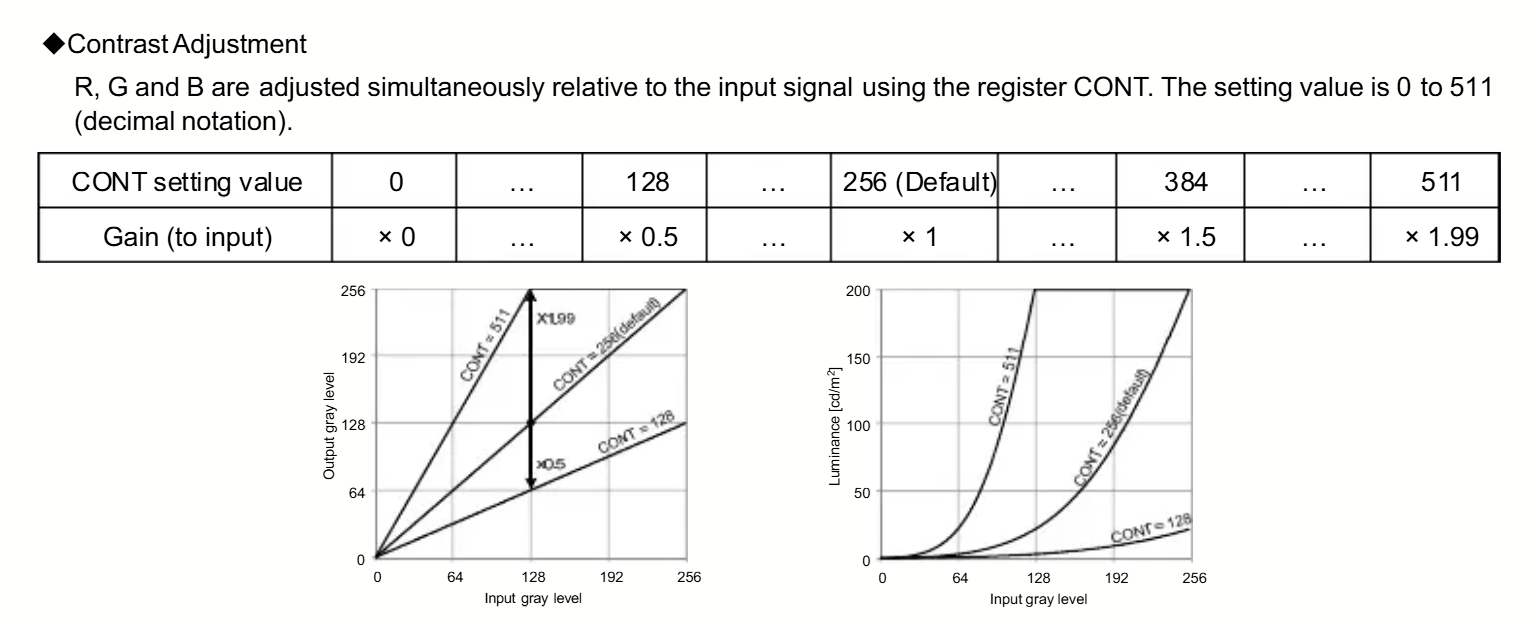
之后是一些温控,白平衡,亮度调节,抖动,对比度,什么轨道函数等方面的内容。比如设置高温关机啥的。基本上就是线说以下怎么操作寄存器,然后效果是什么样的。
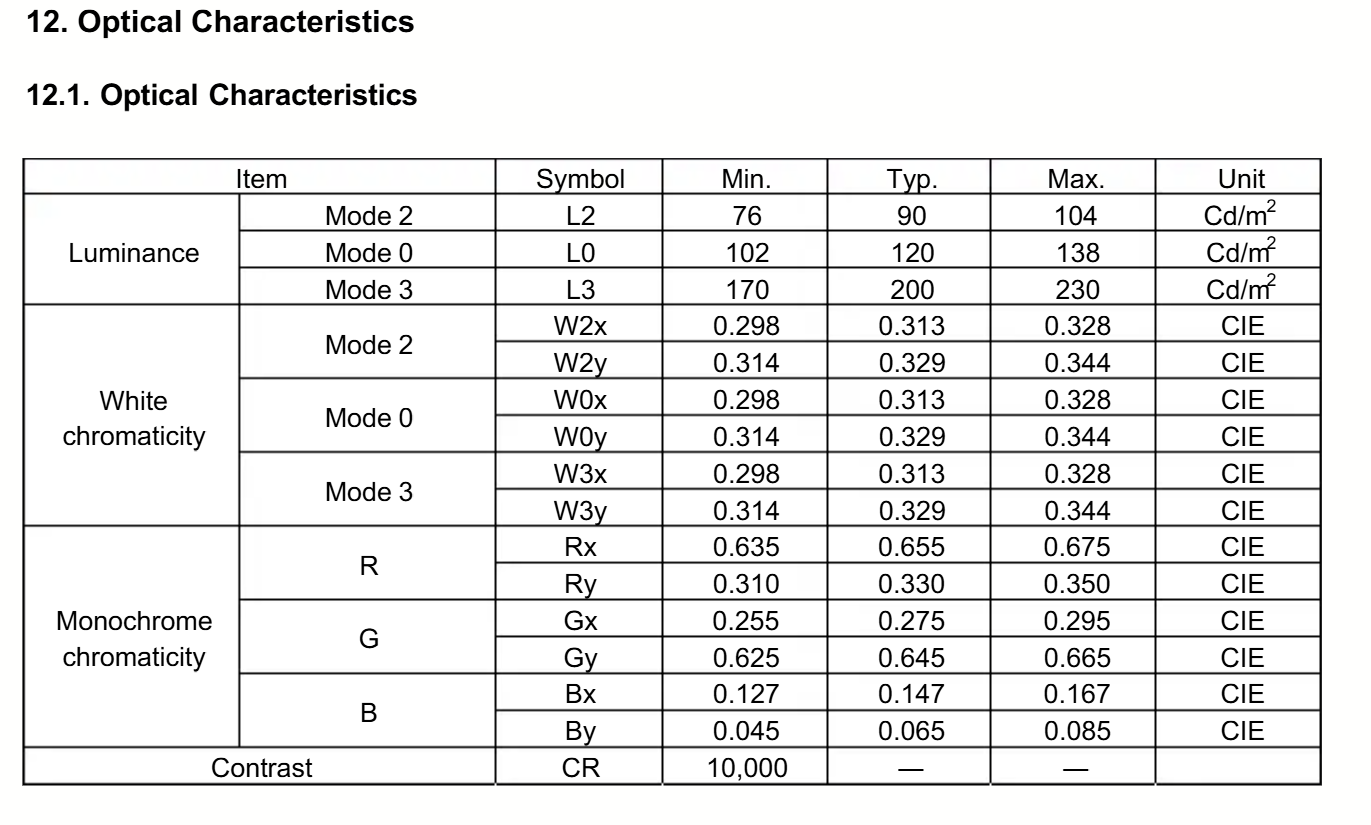
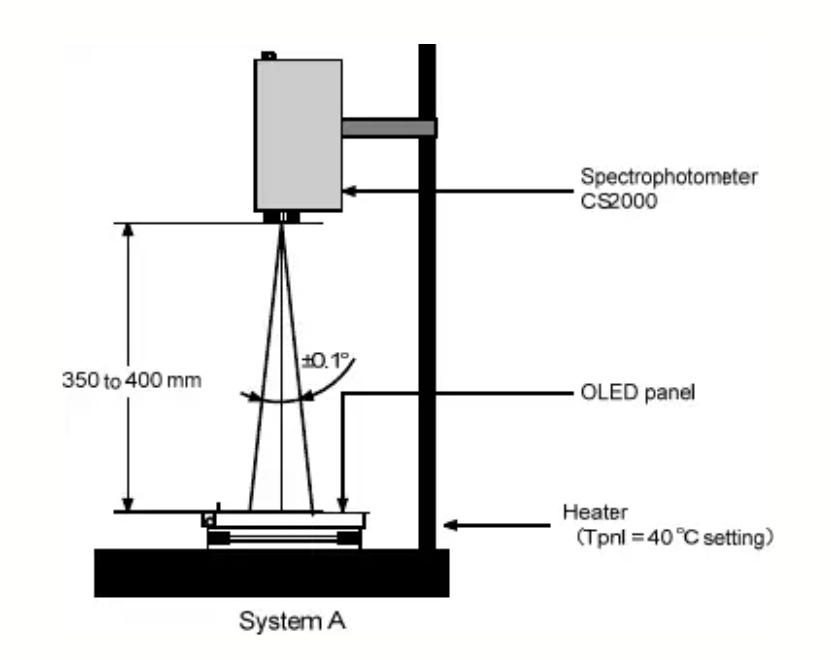
7 光学特性
这部分我也不是太懂,就不多写了。
最后就是包装,封装等内容。。。