广角镜头凭借超大视场角(FOV),成为智能手机影像系统的标配,广泛应用于集体人像、风光拍摄等场景。但透视投影带来的几何畸变是长期存在的难题:在 100°~120° 视场角的广角画面中,远离镜头中心的人脸会出现拉伸、歪斜、比例失调等问题,严重影响人像观感。
现有的传统投影算法(球面投影、墨卡托投影、帕尼尼投影)虽能缓解人脸畸变,却会造成场景中直线物体弯曲,破坏画面真实感;各类商用修图工具依赖手动调节,难以满足手机即拍即处理的交互需求。
2019 年谷歌团队发表于 ACM Transactions on Graphics (ACM TOG) 的《Distortion-Free Wide-Angle Portraits on Camera Phones》,提出了一套面向移动端的全自动广角人像无畸变矫正算法,成为现阶段手机广角人脸校正功能的主流技术参考方案。该方法基于内容感知网格形变与多约束能量优化,对人脸区域采用球面投影实现保角矫正,背景区域保留原始透视投影,并通过平滑过渡解决两类投影的冲突,在矫正效果、运行效率、场景鲁棒性上实现了平衡。
本篇技术博客将以该论文为核心依据,从问题背景、算法流程、能量函数设计、移动端工程实现、效果对比等维度,系统性解析这套广角形变校正算法,并分析其优势与现存局限。
摘要
摄影师使用广角镜头拍摄,既能收获开阔的视野、拍出全员入镜的集体人像,也能将人物与壮丽的背景风光相结合。尽管手机广角摄像头已得到广泛普及,但更大的视场角会加剧透视畸变。其中最为明显的问题是,画面中的人脸会被拉伸、挤压、扭曲,呈现出与真实样貌截然不同的效果。想要修正这类畸变往往需要专业的修图技巧,简单的调整操作还容易引发新的失真问题。
本文提出一种全新算法,能够在不改动画面其他区域的前提下,完成人脸畸变矫正。该算法将人像照片作为输入,通过构建优化问题生成内容感知形变网格:在人脸区域局部适配球面投影以修正畸变,同时在背景区域平滑过渡为透视投影。本文设计的新型能量函数,能够高效、稳定地处理多人合影场景。整套算法完全自动化,可在移动设备上实现实时处理,在70°至120°的各类视场角下均能呈现出出色的矫正效果。
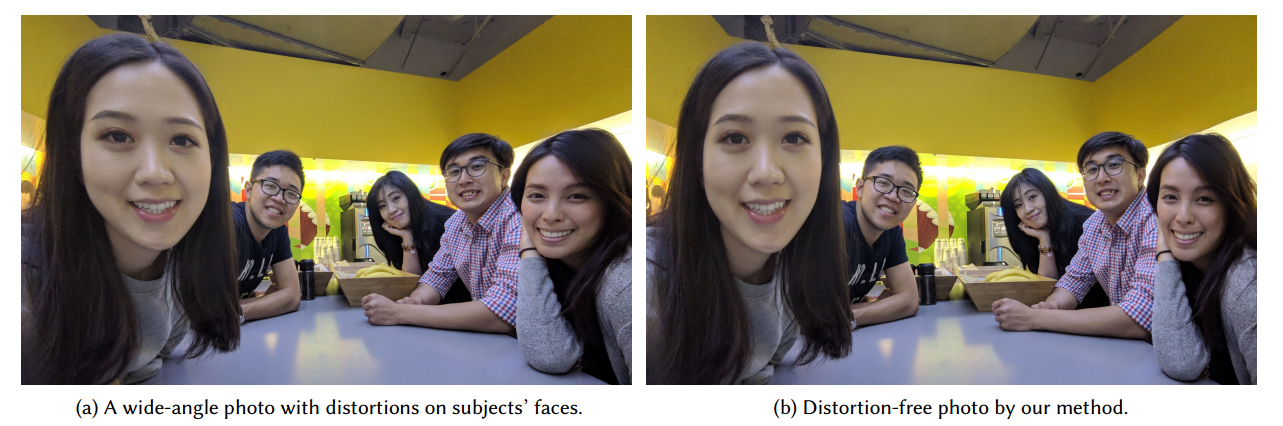
- 图1 (a) 采用97°视场角手机广角镜头拍摄的多人自拍。透视投影会让画面边缘的人脸显得很不自然:面部被拉伸、扭曲、挤压。(b) 本文算法修复了所有变形的人脸,同时保持背景画面不受影响。
引言(Introduction)
1. 应用背景与现状
广角镜头凭借更广的视野,广泛应用于婚礼、运动、风光、街拍等摄影场景,也是如今高端智能手机的标配,非常适合拍摄多人自拍、集体合影。不少旗舰手机前置、后置镜头都配备了大视场角(FOV)广角摄像头。
2. 现存核心痛点
广角成像基于透视投影,会产生明显畸变:画面边缘的人脸被拉伸、挤压、形态不对称,视觉效果违和。同时当下手机广角镜头普遍存在两类缺陷,要么是严重的透视畸变,要么是类鱼眼畸变,造成建筑、墙面、窗框等实景中的直线发生弯曲。
在移动互联网时代,手机人像、自拍、集体合影的拍摄与分享十分频繁,但现有手段很难便捷解决上述问题。
3. 本文方案与优势
本文提出一套全自动人像透视畸变矫正算法:先识别人物区域,构建粗粒度形变网格并分配顶点权重;让人脸区域采用球面投影修复畸变,背景沿用原始透视投影,并保证两种投影方式在人脸边界平滑过渡。
该方案区别于传统通用透视矫正算法,专门针对人脸这一特殊对象优化。算法经过四千余张 、视场角70°120°、人数110人以上的人像图片验证,鲁棒性强。同时算法软硬件开销低,在主流手机上处理1200万像素图像仅需920毫秒,完全满足手机即拍即看、即时分享的交互需求。
4. 论文核心贡献
- 设计出一套全自动、高效率的算法,专门矫正广角人像中人脸区域的透视畸变;
- 提出全新的人脸目标能量项,实现人脸区域使用球面投影、背景区域保留透视投影的混合投影效果。
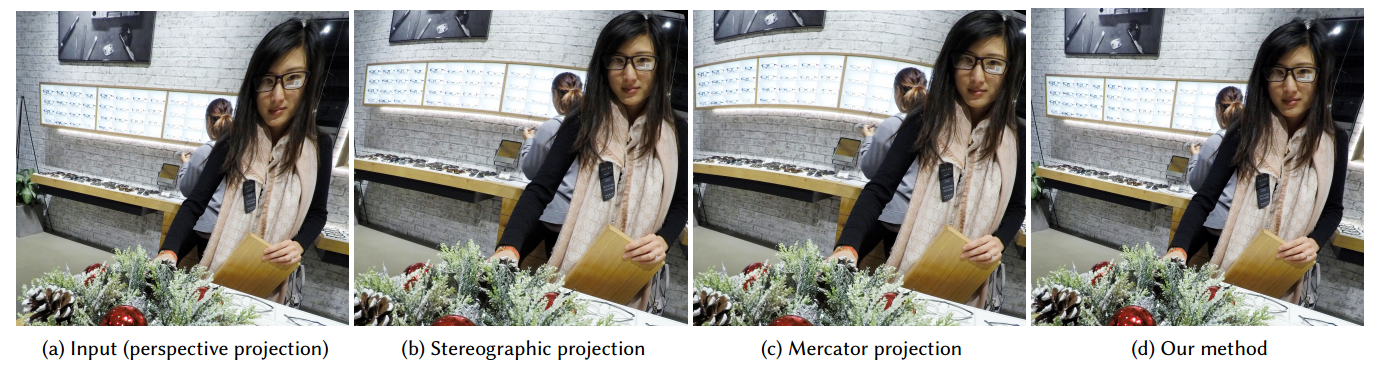
- 图2 将全局投影算法应用于原图(a)后,会产生鱼眼畸变,导致场景中的直线发生弯曲,效果如(b)©所示。本文算法能够修复人脸畸变,同时保留背景画面,不会使直线边缘发生形变,结果见(d)。
相关工作(Related Work)
论文从三维投影、镜头畸变、透视畸变处理、内容感知形变、人脸畸变修复五大方向梳理现有研究,并对比本方案的差异化。
1. 三维投影
三维投影本身就会给二维图像引入畸变,视场角越大,远离画面中心的物体形变越严重。早在文艺复兴时期,艺术家就已发现这类透视问题。
行业内常用球面投影、墨卡托投影、帕尼尼投影 缓解广角畸变,多用于运动相机、全景图。但这类全局投影 会弯曲场景内的长直线,破坏实景真实感;本文采用局部自适应网格,规避了直线扭曲的问题。
2. 镜头畸变
广角镜头受光学设计限制,本身会产生镜头畸变,常表现为画面边缘直线弯曲,这类问题可通过标定与传统算法修正。
但镜头畸变修正≠透视畸变修正:即便消除了镜头本身的光学畸变,广角带来的透视形变依然存在。传统解决方式是使用长焦镜头,或让人物站在画面中心,本文则不受构图与站位限制。
3. 透视畸变处理
传统透视校正分为两类:
- 手动/自动全局单应性变换:例如Photoshop的透视变形工具,会改变整张图的透视关系,容易引发新畸变;
- 基于网格的校正方法:大多需要用户手动标注直线、消失点等约束条件,无法做到全自动,也难以适配手机实时使用场景。
本文全程自动运行,且只做局部矫正,保留原图整体视角与视场角。
4. 内容感知形变
内容感知形变技术已广泛用于全景拼接、图像缩放、视频防抖、立体图像编辑等场景。
现有方法主要面向通用物体做几何还原,而本文聚焦人像照片:人脸是人类视觉高度敏感的区域,多人相邻、遮挡、姿态多变时修复难度更高,这也是本工作的核心难点。
5. 人脸畸变矫正
- 部分方法借助3D人脸模型矫正近摄产生的透视缩短畸变,但其依赖精准建模,在多人、遮挡、复杂姿态的野外实拍场景中难以落地;
- 人脸美化类算法基于审美统计调整脸型,而本文目标并非美颜,而是让画面边缘人脸还原至中心视角的正常形态,不依赖审美偏好。
综上,现有各类技术均无法同时满足全自动、移动端实时运行、只矫正人脸且不破坏背景结构的需求,这也凸显了本文方法的创新价值。
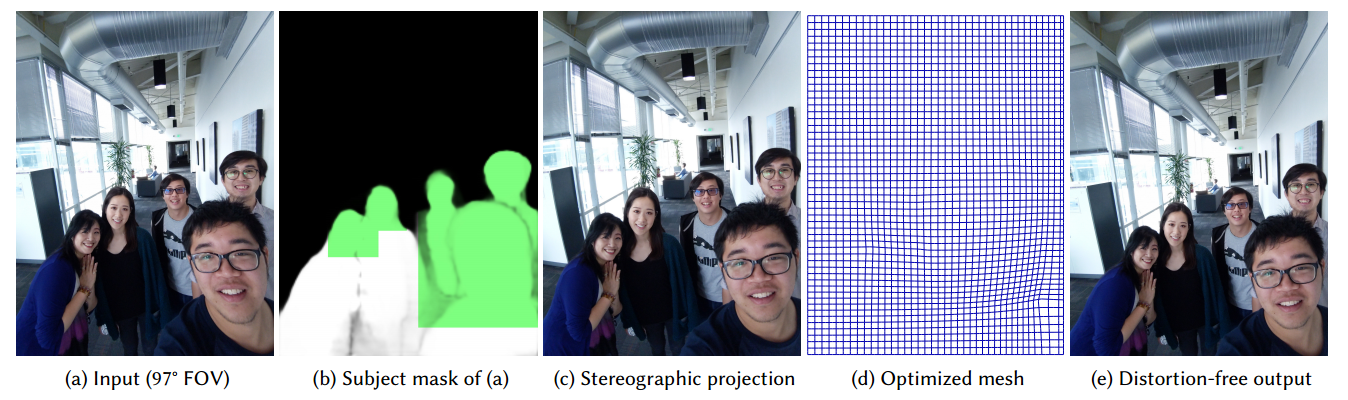
- 图3 算法整体流程:输入一张经透视投影成像的广角照片(a),首先通过人像分割提取出人脸区域(b),并计算球面投影(详见第3节)。图(b)中,我们用绿色标注出扩展人脸框相交的区域;图©为对原图(a)做形变后得到的球面投影效果。随后通过面向人脸畸变矫正的能量优化算法生成矫正网格(d)(详见第4节)。最后使用该网格对原图(a)进行形变,得到最终输出结果(e)。在图(e)中,右下角人脸的畸变得以修复、观感自然,同时背景也未出现图©中的鱼眼畸变。
3 PRELIMINARIES AND OVERVIEW(预备知识与算法总览)
本节完整介绍算法整体流水线、关键前置技术、数学公式、掩码生成、投影模型与网格初始化,是全文算法的基础。
算法整体流程总览
整套算法共5个步骤,对应论文图3:
- 输入:经透视投影成像的广角人像图;
- 人物掩码分割:提取人脸、头发待矫正区域;
- 计算球面投影:依据相机焦距求解球面投影映射关系;
- 能量优化求解网格:得到兼顾人脸矫正、背景保形的最优形变网格;
- 网格形变输出:用优化网格对原图做形变,得到无畸变结果。
核心思路:人脸区域局部采用球面投影,背景保持原始透视投影,依靠网格与能量约束实现两类投影平滑过渡。
人物掩码分割(Subject Mask Segmentation)
算法仅对人脸、头发区域做畸变矫正,首先依靠现成的人像分割网络得到主体掩码,再结合人脸检测与面部关键点优化掩码范围:
- 基础掩码:使用现有分割网络得到整个人物区域掩码;
- 人脸检测框:结合人脸检测器输出矩形框,将主体掩码与人脸框取交集,初步锁定面部区域;
- 区域扩展:
- 提取128个面部轮廓关键点(包含下巴),扩展人脸框以完整覆盖面部轮廓;
- 向上2倍高度 、左右各0.5倍宽度扩展框体,保证完整纳入头发区域;
- 特性:该掩码对人脸姿态、遮挡、多人同框、弱光环境均具备鲁棒性。
掩码用于生成顶点权重 ,区分网格顶点是否属于人脸区域,权重定义:
wi={0pi∉人脸掩码,1pi∈人脸掩码 w_{i}= \begin{cases} 0 & p_{i} \notin \text{人脸掩码}, \\ 1 & p_{i} \in \text{人脸掩码} \end{cases} wi={01pi∈/人脸掩码,pi∈人脸掩码
- pip_ipi:原始透视网格上的第 iii 个顶点;
- wiw_iwi:顶点权重,1代表该顶点属于人脸区域、需要矫正,0代表背景区域、不做人脸矫正。
球面投影(Stereographic Projection)核心数学公式
球面投影是一种保角映射 ,能最大程度修复人脸透视畸变,但会弯曲场景直线。论文基于径向映射建立透视投影与球面投影的坐标转换关系。
-
符号定义
- rpr_prp:透视投影下,像素点到光心的径向距离;
- rur_uru:球面投影下,对应像素点到光心的径向距离;
- fff:相机焦距;
- W,HW,HW,H:图像宽、高;
- d=min(W,H)d = \min(W,H)d=min(W,H):图像短边长度;
- r0r_0r0:缩放系数,保证图像边界处两种投影坐标一致。
-
径向映射主公式
ru=r0tan(0.5arctan(rpf))(1) r_{u}=r_{0} \tan \left(0.5 \arctan \left(\frac{r_{p}}{f}\right)\right) \tag{1} ru=r0tan(0.5arctan(frp))(1)
该公式完成透视坐标 → 球面投影坐标的转换,是人脸区域畸变矫正的核心映射。
-
缩放系数 r0r_0r0 计算公式
为保证图像边缘像素在两种投影下位置重合,约束边界处 ru=rpr_u = r_pru=rp,推得:
r0=d2tan(0.5arctan(d2f))(2) r_{0}=\frac{d}{2 \tan \left(0.5 \arctan \left(\frac{d}{2 f}\right)\right)} \tag{2} r0=2tan(0.5arctan(2fd))d(2)
-
公式作用说明
对图像每个网格顶点 pip_ipi,代入 rpr_prp 可算出球面投影位置 uiu_iui,构成球面投影网格 MuM_uMu;
纯球面投影会扭曲背景直线,因此本文不全局使用,仅在人脸区域局部应用。
网格定义(Mesh Placement)
论文采用规则网格实现图像形变,统一数学符号与网格模型:
- 向量表示:列向量使用粗体标注,例 c=cx,cy,... ⊤\boldsymbol{c} = c_x, c_y, \\dots^\topc=cx,cy,...⊤;
- 网格 MMM:具备网格拓扑的连通图,由顶点集合 {vi}\{v_i\}{vi} 构成,viv_ivi 为顶点二维坐标;
- 原始透视网格 MpM_pMp:均匀规则网格,顶点记为 {pi}\{p_i\}{pi},对应输入图像原始透视投影;
- 球面投影网格 MuM_uMu:将 MpM_pMp 中所有顶点逐一代入公式(1)(2)映射得到,顶点记为 {ui}\{u_i\}{ui}。
图像形变逻辑:整张图的像素映射,由网格顶点位置插值得到。
朴素方案的缺陷
若直接使用权重 wiw_iwi 对 MpM_pMp 和 MuM_uMu 做简单插值融合:人脸区域直接套用 MuM_uMu、背景保留 MpM_pMp,会在人脸边界产生严重形变伪影 。
原因:两个网格在边界处顶点偏移量差异过大,简单插值无法平滑过渡,还会连带扭曲背景区域。因此论文引入能量最小化框架优化网格顶点,解决边界冲突。
本节核心逻辑总结
- 区域划分 :依靠人像分割+人脸检测+关键点扩展得到精准掩码,用二值权重 wiw_iwi 区分人脸/背景;
- 投影模型:给出完整球面投影径向映射公式(1)(2),建立透视投影与球面投影的数学转换关系;
- 网格模型 :定义原始透视网格 MpM_pMp、球面投影网格 MuM_uMu,明确基于网格的图像形变范式;
- 问题引出:直接融合两种网格会产生边界伪影,为下一章**局部人脸去畸变(能量优化)**做铺垫。
本节所有数学公式、符号、网格模型、掩码规则均为第四章能量优化的前置基础。
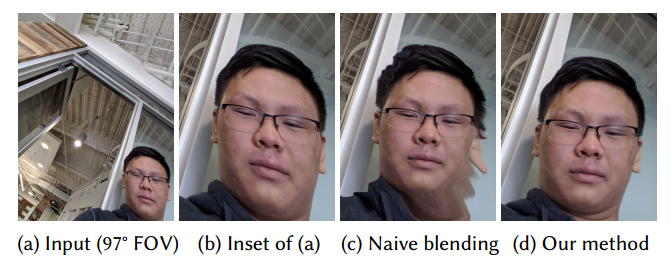
- 图4 广角图像(a)会造成画面角落的人脸发生畸变,局部放大效果见(b)。若简单地将人脸区域的球面投影网格MuM_uMu直接套用至原始均匀网格MpM_pMp上,会在人脸边界产生明显瑕疵,如图©所示。而本文第4节提出的优化方法,能够有效消除人脸边界处的这类问题,效果见(d)。
4 LOCAL FACE UNDISTORTION(人脸局部去畸变)
本章是论文核心算法模块 ,通过能量最小化求解最优形变网格,融合球面投影(人脸)与透视投影(背景),同时约束直线结构、网格平滑与边界伪影。下面按原文结构完整拆解,保留全部数学公式、变量定义与推导逻辑。
4.1 整体优化目标
算法目标:求解最优网格 M∗={vi∗}M^*=\{v_i^*\}M∗={vi∗},使得总能量函数 EtE_tEt 最小 。
优化表达式:
{vi∗}=argmin{vi} Et({vi})(4) \{v_i^*\} = \underset{\{v_i\}}{\mathrm{argmin}}\ E_t(\{v_i\}) \tag{4} {vi∗}={vi}argmin Et({vi})(4)
viv_ivi 为待优化的网格顶点二维坐标,EtE_tEt 是由多项约束加权组成的总能量。
4.2 人脸目标能量项 EfE_fEf(核心矫正项)
该部分作用:驱动人脸区域网格向球面投影网格对齐,实现畸变矫正;同时引入隐变量解决多人脸互相干扰、脸型缩放异常问题。
总人脸能量
整张图像存在多个人脸时,总人脸能量为单个人脸能量之和:
Ef=∑kEs,k(5) E_f = \sum_{k} E_{s,k} \tag{5} Ef=k∑Es,k(5)
- kkk:图像中检测到的第 kkk 张人脸;
- Es,kE_{s,k}Es,k:第 kkk 张人脸对应的单人脸能量项。
单人脸能量 Es,kE_{s,k}Es,k
E_{s,k} = \\sum_{i \\in B_k} w_i m_i \\big\| v_i - \\big(S_k u_i + t_k\\big) \\big\|_2\^2 * \\lambda(S_k) \\tag{6}
-
变量释义
- BkB_kBk:第 kkk 张人脸覆盖的所有网格顶点集合;
- wiw_iwi:前文定义的人脸掩码二值权重(111 为人脸区域,000 为背景);
- uiu_iui:球面投影网格 MuM_uMu 的顶点坐标;
- viv_ivi:当前待优化网格顶点坐标;
- ∥⋅∥22\|\cdot\|_2^2∥⋅∥22:二范数平方,衡量顶点偏移误差;
- Sk,tkS_k, t_kSk,tk:单人脸相似变换隐变量(优化后丢弃),分别为旋转+缩放矩阵、平移向量,允许单张人脸整体平移、旋转、缩放,缓解多人脸区域的矫正冲突;
- mim_imi:径向权重,控制矫正强度。
-
矫正强度权重 mim_imi
mim_imi 由径向Sigmoid函数 生成:
mi=11+exp(−(r−ra)/rb) m_i = \frac{1}{1+\exp\big(-(r-r_a)/r_b\big)} mi=1+exp(−(r−ra)/rb)1
- rrr:顶点 pip_ipi 到图像光心的径向距离;
- ra,rbr_a, r_bra,rb:衰减控制参数;
- 工程设定:图像中心 mi=0.01m_i=0.01mi=0.01(几乎不矫正),视场角 100∘100^\circ100∘ 处 mi=1m_i=1mi=1(最大强度矫正),符合"角落畸变更严重"的成像规律。
-
相似变换矩阵 SkS_kSk
SkS_kSk 为二维旋转+均匀缩放矩阵 ,形式为:
Sk=akbk−bkak(7) S_k = \begin{bmatrix} a_k & b_k \\ -b_k & a_k \end{bmatrix} \tag{7} Sk=ak−bkbkak(7)
- aka_kak:控制人脸整体缩放比例;
- bkb_kbk:控制人脸旋转角度;
该矩阵保证对人脸做刚体类变换,不会破坏面部轮廓结构。
人脸尺度正则项 λ(Sk)\lambda(S_k)λ(Sk)
为防止矫正后人脸被无故放大/缩小,添加尺度约束正则项:
λ(Sk)=ws∥ak−st∥22(8) \lambda(S_k) = w_s \left\| a_k - s_t \right\|_2^2 \tag{8} λ(Sk)=ws∥ak−st∥22(8)
- ws=2000w_s=2000ws=2000:尺度项权重;
- st=1s_t=1st=1:目标缩放系数(期望人脸尺寸保持不变);
作用:强制 ak→1a_k \to 1ak→1,保证矫正前后人脸大小一致。
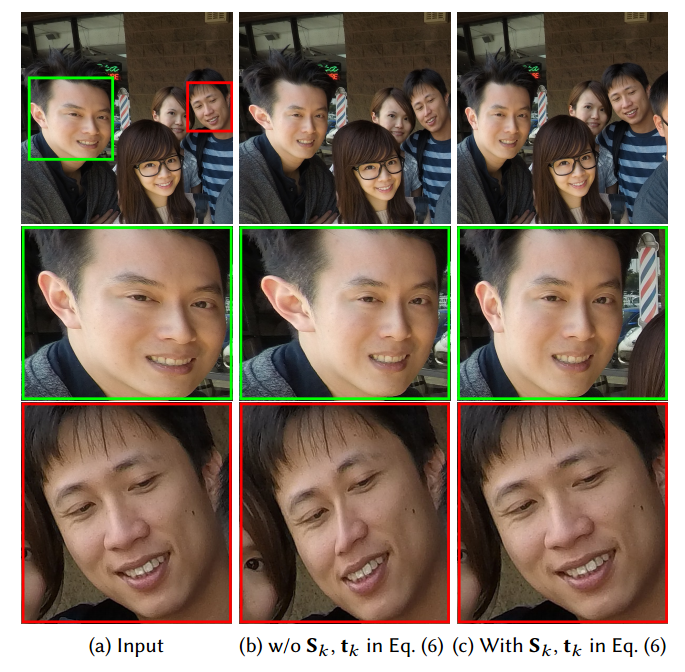
- 图5 图(a)为多张人脸紧密相邻的集体人像。若移除公式(6)中的隐变量SkS_kSk与tkt_ktk,矫正后人脸区域会出现相互干扰的明显瑕疵,如图(b)所示。本文算法引入上述隐变量,可让所有人脸呈现自然效果,见图©。图(a)截取自一张视场角为103°的照片左上角区域。
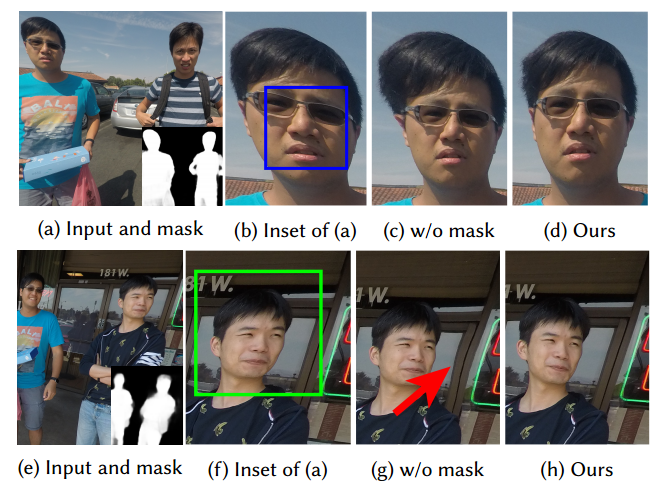
- 图6 人像掩码对本文算法至关重要,对应图(a)、(e)。上图:仅依靠人脸检测框(图(b)蓝色方框)、不使用人像掩码时,矫正结果(图©)无法覆盖头发区域,还会出现不自然的形变。下图:若单纯放大人脸框(图(f)绿色方框)以囊括完整面部,又会在人脸框与背景的交界处产生新的畸形畸变,如图(g)中箭头所指位置。而借助人像掩码,本算法可以精准划定待矫正区域,效果见图(d)、(h)。

- 图7 若去掉公式(8)中的人脸尺度约束项,图(a)中的人脸会在输出结果(图(b))中被不当放大,观感不佳。若移除公式(9)中的抗弯曲项,背景里窗框等硬质线条会发生畸变,如图©箭头标注处所示。结合全部能量项后,最终效果图(d)真实自然。
4.3 直线弯曲能量项 EbE_bEb(背景保直线约束)
作用:抑制网格剪切、扭曲,保护窗框、建筑、家具等场景直线边缘 ,避免全局球面投影带来的弯线伪影。
Eb=∑i∑j∈N(i)∥(vi−vj)×eij∥22(9) E_b = \sum_{i} \sum_{j \in N(i)} \big\| (v_i - v_j) \times e_{ij} \big\|_2^2 \tag{9} Eb=i∑j∈N(i)∑ (vi−vj)×eij 22(9)
- 变量释义
- N(i)N(i)N(i):顶点 iii 的四邻域相邻顶点集合;
- ×\times×:二维向量叉乘;
- eije_{ij}eij:原始透视网格中,由 pip_ipi 指向 pjp_jpj 的单位方向向量;
物理意义:若网格连线发生剪切/弯折,叉乘结果会增大,该能量项会对此类形变进行惩罚,从而保留场景原有直线结构。
4.4 网格平滑正则项 ErE_rEr
作用:约束相邻网格顶点相对位置,让整张网格形变过渡自然,消除局部锯齿、块状伪影。
Er=∑i∑j∈N(i)∥vi−vj∥22(10) E_r = \sum_{i} \sum_{j \in N(i)} \big\| v_i - v_j \big\|_2^2 \tag{10} Er=i∑j∈N(i)∑ vi−vj 22(10)
该项鼓励相邻顶点间距保持稳定,保证网格整体平滑。
Mesh Boundary Extension(网格边界扩展)
直接对原始网格施加边界约束,会导致贴近画面边缘的人脸(如下巴、脸颊)出现拉伸畸变 。论文采用网格补边方案优化边界条件。
-
扩展规则
在原始网格四周额外填充 q=4q=4q=4 层顶点,对扩展后网格施加边界约束:
{vi,x=pi,x,i∈左右边界vi,y=pi,y,i∈上下边界(11) \begin{cases} v_{i,x} = p_{i,x}, & i \in \text{左右边界} \\ v_{i,y} = p_{i,y}, & i \in \text{上下边界} \end{cases} \tag{11} {vi,x=pi,x,vi,y=pi,y,i∈左右边界i∈上下边界(11)
含义:边界顶点仅能沿画面边框方向移动,不能垂直穿出边界;将形变畸变分散到填充的额外顶点中,原图区域伪影大幅减少。优化完成后裁剪掉填充顶点。
-
非对称边界代价项 EaE_aEa
防止网格形变后出现画面空白、像素缺失,约束原始网格边界顶点向外扩张、不向内收缩 :
Ea=El+Er+Et+Eb(12) E_a = E_l + E_r + E_t + E_b \tag{12} Ea=El+Er+Et+Eb(12)
各子项定义(I(⋅)I(\cdot)I(⋅) 为指示函数:条件为真取1,否则取0;WWW 图像宽度,HHH 图像高度):
El=I(vi,x>0)⋅∥vi,x∥22,∀i∈左边界Er=I(vi,x<W)⋅∥vi,x−W∥22,∀i∈右边界Et=I(vi,y>0)⋅∥vi,y∥22,∀i∈上边界Eb=I(vi,y<H)⋅∥vi,y−H∥22,∀i∈下边界(13) \begin{align*} E_l &= I(v_{i,x} > 0) \cdot \|v_{i,x}\|2^2,\quad \forall i \in \text{左边界} \\ E_r &= I(v{i,x} < W) \cdot \|v_{i,x} - W\|2^2,\quad \forall i \in \text{右边界} \\ E_t &= I(v{i,y} > 0) \cdot \|v_{i,y}\|2^2,\quad \forall i \in \text{上边界} \\ E_b &= I(v{i,y} < H) \cdot \|v_{i,y} - H\|_2^2,\quad \forall i \in \text{下边界} \end{align*} \tag{13} ElErEtEb=I(vi,x>0)⋅∥vi,x∥22,∀i∈左边界=I(vi,x<W)⋅∥vi,x−W∥22,∀i∈右边界=I(vi,y>0)⋅∥vi,y∥22,∀i∈上边界=I(vi,y<H)⋅∥vi,y−H∥22,∀i∈下边界(13)
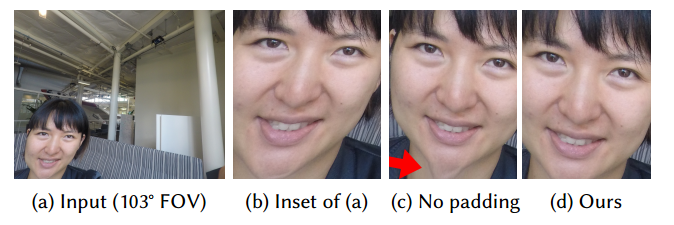
- 图8 当人脸靠近图像边缘时(图a、b),采用硬性边界约束会在画面边缘产生瑕疵,如图c中下巴被拉长、形态怪异。本文通过额外补边的方式放宽边界约束,最终得到更为自然真实的效果(图d)。
Optimization(整体能量组合与求解)
-
总能量函数
将上述所有子能量加权融合,得到最终待优化的总能量:
Et=λfEf+λbEb+λrEr+λaEa(14) E_t = \lambda_f E_f + \lambda_b E_b + \lambda_r E_r + \lambda_a E_a \tag{14} Et=λfEf+λbEb+λrEr+λaEa(14)
固定权重(全文统一使用) :
λf=4, λb=2, λr=0.5, λa=4\lambda_f=4,\ \lambda_b=2,\ \lambda_r=0.5,\ \lambda_a=4λf=4, λb=2, λr=0.5, λa=4
-
网格顶点初始化
- 为加速迭代收敛,不使用随机初始化,而是通过高斯核回归 插值原始透视网格 pip_ipi 与球面投影网格 uiu_iui,得到初始顶点 vi0v_i^0vi0:
vi0=pi+Δvi0(15) v_i^0 = p_i + \Delta v_i^0 \tag{15} vi0=pi+Δvi0(15) - 其中偏移量:
Δvi0=∑jwj⋅Kh(∥pj−pi∥22)⋅Δvj∑jwj⋅Kh(∥pj−pi∥22) \Delta v_i^0 = \frac{\displaystyle \sum_j w_j \cdot K_h\big(\|p_j-p_i\|_2^2\big) \cdot \Delta v_j} {\displaystyle \sum_j w_j \cdot K_h\big(\|p_j-p_i\|_2^2\big)} Δvi0=j∑wj⋅Kh(∥pj−pi∥22)j∑wj⋅Kh(∥pj−pi∥22)⋅Δvj
Δvj={uj−pjpj∈人脸区域0其他区域 \Delta v_j = \begin{cases} u_j - p_j & p_j \in \text{人脸区域} \\ 0 & \text{其他区域} \end{cases} Δvj={uj−pj0pj∈人脸区域其他区域 - 高斯核函数:
Kh(x)=exp(−x2h2) K_h(x) = \exp\left(-\frac{x}{2h^2}\right) Kh(x)=exp(−2h2x) - 带宽参数:h=2.37h=2.37h=2.37;
- 效果:人脸区域初始值靠近球面投影,背景靠近原始透视投影,大幅减少迭代步数。
- 为加速迭代收敛,不使用随机初始化,而是通过高斯核回归 插值原始透视网格 pip_ipi 与球面投影网格 uiu_iui,得到初始顶点 vi0v_i^0vi0:
-
后处理:网格归一化
优化得到最优网格 M∗={vi∗}M^*=\{v_i^*\}M∗={vi∗} 后,做全局缩放+平移,消除形变产生的无效空白区域:
vn,i=sg(vi∗+tg)(16) v_{n,i} = s_g \big(v_i^* + t_g\big) \tag{16} vn,i=sg(vi∗+tg)(16)
-
tg=−v0∗t_g = -v_0^*tg=−v0∗:平移项,将网格左上角对齐图像原点;
-
sgs_gsg:全局缩放系数,遍历边界顶点求取最小缩放比例,保证所有内容完整保留。
4.5 Implementation Details(实现细节,算法配套工程说明)
- 网格尺寸 :统一使用 103×78103 \times 78103×78 规则网格;
- 运行平台:桌面端 + 高通骁龙845(SDM845)移动端;
- 推理框架:人脸分割基于 TensorFlow Lite + Adreno 630 GPU;
- 求解器:使用 Ceres Solver 求解约束最小二乘问题,搭配**信赖域(Trust Region)**优化器;
- 图像重采样 :GPU Shader 实现 7×77\times77×7 支持域的 Lanczos 高质量重采样;
- 性能拆分(1200万像素图像) :
- 人像分割:280 ms
- 网格优化:340 ms
- 图像形变重采样:115 ms
- 总耗时:920 ms;
- 前置处理:从图片 EXIF 读取焦距、视场角,结合内置畸变系数预先完成镜头畸变校正,并将镜头畸变矫正与人脸形变合并为单次网格变换,减少计算开销。
本节核心逻辑总结
- 以最小二乘能量优化为核心,用多组能量项分工约束:人脸对齐球面投影、背景保留直线结构、网格整体平滑、边界无伪影;
- 引入相似变换隐变量,解决多人脸同框时的矫正冲突,配合尺度正则保证人脸尺寸不变;
- 网格补边 + 非对称边界项,专门优化画面边缘人脸的拉伸问题;
- 高斯插值初始化、专业求解器与GPU重采样,兼顾算法精度与移动端实时性;
- 整套公式构成完整的局部形变模型,实现"人脸矫正、背景无损、过渡自然"的设计目标。
5 RESULTS(实验结果与评估)
该章节从基础效果验证、多场景测试、量化指标、主流方案对比、用户主观调研、极端案例测试六大维度,全面验证算法的有效性、鲁棒性与落地价值,同时划分对比对象为传统投影算法、学术前沿方法、商业修图软件与手机原厂功能,完整呈现算法优势与适用边界。
一、实验数据集与基础实验设定
1. 数据集规模与构成
论文总共使用4131张广角人像图片开展全量测试,图片来源包含自主采集与Flickr公开图库,覆盖范围极广:
- 视场角(FOV):70°~120°,涵盖手机常规主摄(约78°)、广角、超广角全档位,匹配主流手机镜头参数;
- 人物数量:单人自拍、多人合影,最多包含20人的大型集体人像;
- 场景与环境:室内外场景、城市建筑、自然风光等人像常见背景,包含大量窗框、墙体、栏杆等直线结构;
- 成像条件:强光、逆光、弱光等复杂光照;人脸姿态包含正脸、侧脸、大角度转头;同时覆盖戴眼镜、帽子、肢体遮挡面部、发型多样等真实拍摄场景;
- 额外抽样子集 :单独选取167张不同国家、不同机型拍摄的图片做鲁棒性专项测试,该子集存在画面噪声、背景杂乱、分割难度大等挑战。
2. 前置预处理
所有输入图像均提前依据EXIF元数据(焦距、传感器参数、镜头畸变系数)完成镜头畸变校正,并将镜头畸变矫正与本文的人脸透视畸变矫正合并为单次网格形变,减少重复计算。由于镜头校正后会进行矩形裁切,输入图像边缘内容略少于最终输出图像。
二、基础矫正效果测试(全视场角通用验证)
1. 不同视场角与画面位置的矫正效果
- 全域位置测试(97° FOV标准广角)
受控实验中将人物人脸布置在相机视场范围内5×3共15个网格点位(覆盖画面中心、边缘、四角)。原始透视投影下,距离画面中心越远,人脸拉伸、歪斜越严重,四角畸变达到峰值;本文算法可对任意位置的人脸完成均等化矫正,矫正后所有人脸形态自然、比例统一,画面中心原本无明显畸变的人脸几乎不会发生变化,完全保留原始状态。 - 常规主摄测试(78° FOV)
当下主流旗舰手机主摄视场角约为75°~80°,这类镜头虽不属于超广角,但依旧存在轻微透视畸变。实验证明本算法对常规视场角镜头同样有效,可进一步优化边缘人脸比例,提升人像观感。 - 超大视场角测试(103°/104° FOV超广角)
针对畸变最严重的超广角场景,算法依旧可以精准修复扭曲的面部轮廓,同时不破坏背景直线。
2. 多人大型合影测试
针对20人规模的集体人像(79° FOV),画面边缘多人脸同时出现拉伸畸变。算法可批量完成所有人脸的局部矫正,人脸与背景过渡自然,整张画面的透视关系、建筑线条完整保留,无批量矫正冲突。
3. 特殊拍摄模式:虚化(Bokeh)人像模式
手机人像模式会虚化背景、突出人脸,此时人脸畸变会被进一步放大,观感违和。传统做法是通过裁切缩小视场角来规避畸变,本文算法无需裁切,在保留完整广角视野与人像虚化效果的同时,修复面部畸变,优化人像模式成片质量。
三、量化指标:保角代价(Conformality Cost)分析
论文采用学界通用的保角代价(Conformality Cost) 量化透视畸变程度:该指标数值越高,代表图像局部几何畸变越严重。
- 原始透视投影图像:保角代价从画面中心向四角单调递增,画面边缘与四角畸变显著高于中心;
- 算法矫正后:人脸区域保角代价大幅下降,畸变被有效消除;降低的畸变代价均匀分散至非人脸背景区域,背景整体视觉无明显变化,直线结构不受影响。
该实验从数据层面证明算法精准实现了畸变的局部转移与消除,而非全局简单形变。
四、高难度挑战案例测试
针对真实拍摄中的复杂干扰项,算法开展极限场景验证,全部取得稳定效果:
- 人脸遮挡:帽子、墨镜、手臂遮挡面部;
- 极端姿态:完全侧脸、低头、面部被肢体包裹;
- 恶劣光照 :逆光、暗光、低信噪比图像;
以上场景下,算法依托稳定的人脸分割与关键点扩展能力,依旧可以精准定位矫正区域,输出无伪影的自然结果。
五、多方案对比实验(核心对比模块)
本节将本文算法与传统全局投影算法、经典学术算法、主流商业软件、手机原厂功能四大类方案逐一对比,从视觉效果、功能缺陷、自动化程度三个维度展开分析。
5.1 对比传统全局投影算法
对比对象:球面投影、墨卡托投影、帕尼尼(Pannini)投影(全景、广角图像常用全局矫正方案)
- 球面/墨卡托投影:虽能修复人脸畸变,但会全局弯曲场景内所有直线(窗框、墙体、栏杆),破坏实景真实感;
- 帕尼尼投影:对画面角落人脸矫正不足,同时会错误放大画面中心人脸,造成二次畸变;
- 本文算法:仅局部修改人脸区域,背景直线完整保留,兼顾人脸矫正与场景真实性。
5.2 对比经典学术算法
- Zorin和Barr参数化形变算法:可修复人脸几何畸变,但属于全局形变,会扭曲桌椅、显示器、墙面等背景物体;本文采用局部自适应网格,背景物体形态完全不变。
- 通用网格透视矫正算法:大多需要用户手动标注直线、消失点等约束条件,无法全自动运行,不适配手机即时拍摄的场景;本算法全程自动执行。
5.3 对比主流商业修图软件
- Adobe Photoshop 透视变形(Perspective Warp)
纯手动调节控制点,矫正画面角落人脸时,必然改变整张图的透视关系,导致画面中心人物出现新畸变,同时图像边界变得不规则;本文全自动运行,不改变原图整体透视与视场角。 - DxO ViewPoint 体积形变矫正
需要用户手动调节矫正强度,本质仍属于全局形变,会扭曲背景建筑、围栏等直线结构,还会造成画面边角内容丢失;本文局部矫正,视场角与画面内容完整保留。
5.4 对比手机原厂畸变矫正功能(三星Galaxy S9+ 脸型矫正)
三星该功能同样主打自动矫正广角人脸畸变,但存在明显缺陷:矫正边缘人脸的同时,会放大画面中心人脸,且扭曲窗框等背景直线;本文算法可保证所有人脸尺寸正常、背景线条笔直,综合效果更优。
六、主观用户调研(User Study)
为模拟普通用户的真实视觉感知,论文开展大规模主观测评,是算法落地可用性的核心佐证:
- 测评样本 :从4131张图片中随机抽取1047张,覆盖各类场景、视场角与人物数量;
- 测评规则:每张图片随机打乱"原图"与"本文算法结果"的左右顺序,由5名测试人员投票,选择"畸变更少、观感更自然"的图片,以多数票作为最终结果;
- 核心数据
- 本文算法结果获选占比:92.4%,绝大多数用户认为矫正后画面更自然;
- 横向对比全局投影算法:相比球面投影、墨卡托投影、帕尼尼投影,用户偏好本文算法的比例分别为84%、81%、85%;
- 结论:从人眼视觉感知角度,该算法的畸变矫正效果显著优于传统全局方案。
七、算法现存缺陷与失败案例(客观边界说明)
论文如实记录算法的失效场景与局部瑕疵,对应后续6章节的局限性分析,主要分为四类:
- 依赖人脸检测与分割
密集大合影中存在极小尺寸人脸时,人脸检测器漏检、分割网络识别失败,漏检人脸无法得到矫正;分割掩码偏差也会引入局部伪影。该问题在测试集中出现7例,占比0.16%。 - 近人脸区域直线轻微形变
紧贴人脸轮廓的背景直线,可能出现轻微弯曲,属于两种投影平滑过渡带来的小幅副作用。该问题出现6例,占比0.1%。 - 矫正范围仅限面部
算法仅矫正人脸与头发区域,肩膀、躯干、手臂等部位不做处理。当面部形变修复而肢体依旧保留原始畸变时,头身比例衔接略显违和,但用户普遍仍接受"人脸正常"的最终效果。 - 特定场景完全不适用
- 印刷在海报、展板上的人像:不属于真实相机透视成像模型,算法会过度/不足矫正;
- 近距离拍摄导致的透视缩短畸变(Foreshortening):本算法仅解决广角透视畸变,无法处理镜头过近造成的面部畸变。
八、本章总结
- 鲁棒性:在70°~120°全视场角、多人合影、复杂光照、人脸遮挡等真实场景下均能稳定输出优质结果,适配手机日常拍摄全场景;
- 技术优势 :区别于全局形变方案,实现人脸局部矫正+背景直线保真,同时全程自动化、低延迟,契合移动端使用逻辑;
- 综合表现:无论是量化指标(保角代价)、客观视觉对比,还是大规模用户主观测评,效果均全面超越传统投影、学术算法与主流商业工具;
- 落地价值:算法兼顾精度与移动端算力,成为手机广角人脸矫正功能的核心技术原型;同时明确了算法边界,为后续优化方向提供依据。