目录
1.摘要
针对无人机集群在高维复杂及不完全信息环境下计算难题,本文提出一种双层优化方案。针对任务分配,构建结合不完全信息博弈论改进MAPPO算法,有效解决信息缺失下的协同与竞争难题;针对路径规划,结合人工势场法与滚动时域控制引入动态聚类DCPSO算法。
2.基于MAPPO不完全信息下无人机任务分配
无人机任务分配建模
无人机实时位置运动学模型为:
x = v cos ϕ x = v \cos \phi x=vcosϕ
y = v sin ϕ y = v \sin \phi y=vsinϕ
若包含 N N N 架无人机的集群 U U U 在总时间 T m a x T_{max} Tmax 内执行任务,令 y i , n = 1 y_{i,n} = 1 yi,n=1 表示第 n n n 架无人机捕获第 i i i 个目标(否则为0),结合无人机速度 S n S_n Sn 约束,最大化总收益:
max min ∑ i r i ∑ n y i , n \max \min \sum_i r_i \sum_n y_{i,n} maxmini∑rin∑yi,n
MAPPO算法及其改进
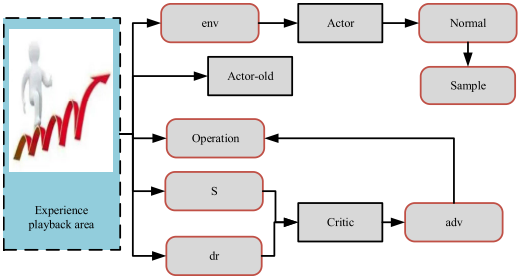
为改进MAPPO算法,本文引入不完全信息博弈论 。多智能体面对相同航路点时,按随机概率 P P P抉择以构建集群内部竞合关系。智能体根据可达终点、收益 r i ri ri及对方收益期望分布慨率重选目标点,实现新一轮最优任务分配。
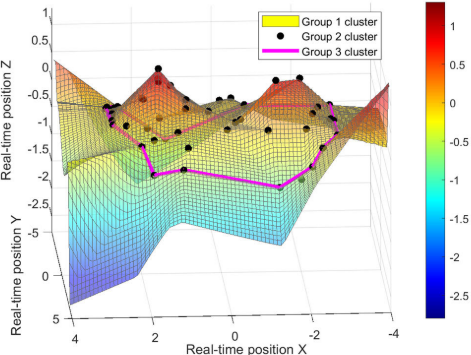
3.基于动态聚类粒子群算法的无人机路径规划
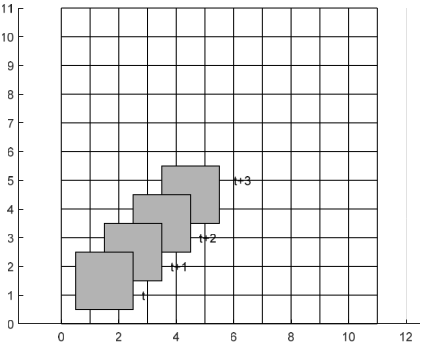
滚动时域控制策略中,无人机在相邻时刻仅能在相邻网格中心间沿8个方向移动。设滚动窗口包含3个航迹点,无人机每阶段探测当前窗口覆盖的矩形区域以获取环境信息。
动态聚类机制按位置密度将种群平分为两个互不干扰的子集群独立迭代。集群馄踪当前局部最优,集群2持续探索解空间,每轮迭代后合并。
路径规划采用人工势场法建模,引力场引导无人机趋向目标:
f a ( x , y ) = ε × ( x − x 0 ) 2 + ( y − y 0 ) 2 f_a(x,y)=\varepsilon\times(x-x_0)\^2+(y-y_0)\^2 fa(x,y)=ε×(x−x0)2+(y−y0)2
斥力场实现障碍物逼近:
f r ( x , y ) = η ∗ ( 1 p ( x , y ) − 1 a 0 ) 3 f_r(x,y)=\eta*\left(\frac1{p(x,y)}-\frac1{a_0}\right)^3 fr(x,y)=η∗(p(x,y)1−a01)3
结合人工势场法与滚动时域控制,无人机三维路径规划问题被转化为目标函数的最优解求解过程。当集群发现新目标或目标状态发生转移(如由侦察转为攻击)时,将触发任务重分配算法。集群成员采取单任务规划策略,即完成当前任务后才分配下一任务,直至所有目标任务执行完毕或燃油耗尽。
4.参考文献
Hu W, Ma X. Optimization Algorithm of UAVs Task Assignment and Path Planning Based on Dynamic Cluster Particle Swarm OptimizationJ. IEEE Transactions on Intelligent Transportation Systems, 2025.
5.算法辅导·应用定制·读者交流
xx