摘要:L4级商用车主挂一体化系统面临多自由度运动学退化、非线性动力学特性及大范围参数漂移等挑战,导致大模型控制在动态场景中鲁棒性下降。针对偏航、蛇形摆动和折头三大高危场景,系统通过物理熔断机制实时监控铰接角状态,并在风险触发时移交控制权至VMC层,采用差动制动、ABS干预等策略进行分布式安全控制,确保车辆稳定性。其中,高速蛇形摆动通过挂车后轴非对称制动收敛能量,折头风险则通过牵引车制动力释放与挂车全量制动组合干预,防止动力学失稳。
1.4 L4 商用车主挂一体化(Trailer)动态场景矩阵(偏航、蛇形摆动、折头控制需求)
1.4.1 主挂一体化物理架构下的多自由度运动学退化
商用车(牵引车与挂车组合体)由于其多铰接点物理拓扑结构,具备高质心、长轴距以及非线性时变动力学特征。相比于单体乘用车,主挂一体化系统增加了铰接角(Articulation Angle, gamma)自由度,其状态方程呈现强耦合与高度非线性。
-
大模型控制流在多自由度环境下的鲁棒性退化
-
多体动力学参数漂移:挂车在满载(≥ 40t)、空载、以及非对称装载工况下,系统的总质心高度、转动惯量以及轮胎侧偏刚度会发生质的改变。端到端大模型(VLA)的神经网络本质上是基于离散概率流的拟合映射,由于缺乏物理守恒约束,在面对大范围参数漂移时,输出的期望横摆力矩极易失真。
-
时间延迟叠加效应:商用车普遍采用气制动系统,从控制信号发出到气路压力最终建立(EBS 阀动作),存在 80ms ~ 150ms 的物理传输延迟。大模型在前级规划时,若无法建立精确的时间步延迟补偿模型,控制指令与底盘物理暂态响应将产生相位差,诱发车辆失稳。
-
1.4.2 挂车特定动态高危场景矩阵解耦
系统将 L4 级商用车主挂一体化的长尾恶性边缘场景(Edge Cases),刚性量化为以下三大物理特征场景矩阵:
┌───────────────────────────────────────┐
│ L4 商用车主挂一体化动态场景矩阵 │
└───────────────────┬───────────────────┘
│
┌────────────────────────────────────────┼────────────────────────────────────────┐
▼ ▼ ▼
┌─────────────────────────────────┐ ┌─────────────────────────────────┐ ┌─────────────────────────────────┐
│ 偏航与路径跟踪偏差矩阵 │ │ 高速蛇形摆动(Swaying)矩阵 │ │ 折头(Jackknifing)矩阵 │
├─────────────────────────────────┤ ├─────────────────────────────────┤ ├─────────────────────────────────┤
│ · 铰接角静态零点漂移 │ │ · 高速行驶(v ≥ 80km/h) │ │ · 低附着路面(冰雪/湿滑) │
│ · 大曲率匝道挂车内轮差(~1.5m) │ │ · 侧向强风持续激励(风力 ≥ 7级) │ │ · 牵引车后轴发生锁死 │
│ · 挂车车道内偏航(Tail-swing) │ │ · 挂车能量无法收敛形成极限环 │ │ · 铰接角变化率 dγ/dt 突变 │
└─────────────────────────────────┘ └─────────────────────────────────┘ └─────────────────────────────────┘A. 偏航与路径跟踪偏差矩阵(Yaw and Path Tracking Deviation)
-
物理特征:大曲率匝道或城市复杂路口直角转弯工况。由于挂车内轮差(Inner Wheel Margin,最大可达 1.5m)的存在,牵引车与挂车行驶轨迹严重剥离。
-
感知卡闸:前级双侧后视相机与周视毫米波雷达必须实时解算铰接角 gamma 与挂车后轴边缘的空间占位。若大模型生成的轨迹网络未包含内轮差补偿,系统将强行在中间件层将挂车侧向通行裕度(Free Space Margin)向内侧拓宽 1.8m,作为刚性物理几何隔离带。
B. 高速蛇形摆动矩阵(Trailer Sway / Fishtailing)
-
物理特征:车辆在高速行驶(v ≥ 80km/h)中受到连续侧向激励(如横风、路面颠簸或紧急变道)。挂车横摆运动滞后于牵引车,两者的能量相位交错,导致挂车产生振幅逐渐放大的蛇形摆动(极限环振荡)。
-
动力学卡闸:系统严密监控挂车横摆角速度 omega_trailer 与牵引车横摆角速度 omega_tractor 的相位差。当两者相位差趋近于 180° 且振幅连续 2 个周期呈指数增长时,直接判定大模型进入失控控制状态。
C. 折头与不可逆制动折叠矩阵(Jackknifing)
-
物理特征:在低附着路面(mu ≤ 0.3,如冰雪、湿滑路面)进行紧急制动或大角度转向。若牵引车驱动轴制动力过大导致后轮制动锁死,挂车由于巨大的纵向惯性会剧烈推挤牵引车鞍座,使铰接角 gamma 在极短时间内(< 300ms)跨越临界物理阈值,造成整车折叠。
-
极限边界:铰接角物理极限阈值 gamma_limit(通常由机械结构决定,取值在 45° ~ 60° 之间)。
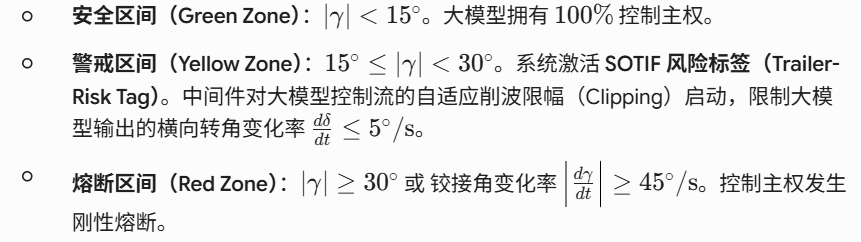
1.4.3 动态风险标签与控制主权的物理熔断逻辑
端到端大模型在处理上述主挂非线性冲突时,其规划端输出的横向转向角(delta)和纵向期望驱动扭矩(T_q)往往表现出非确定性。系统在底软层引入高刚性物理熔断器(Physics-based Fuse),基于铰接角状态机进行越权拦截:
-
铰接角状态空间分类与置信度动态掩码
-
物理熔断机制流程
[大模型动作指令 (期望转角 δ / 期望扭矩 Tq)] ──► [中间件物理熔断器监测门槛]
│
┌─────────────────────────────────┴────────────────────────────────┐
▼ (若满足: |γ| ≥ 30° 或 |dγ/dt| ≥ 45°/s) ▼ (若处于安全区间)
[物理熔断触发: 剥夺大模型整车控制主权] [维持大模型正常控制流]
│
▼
[越权移交: 启动传统车规级分布式安全控制内核]
│
▼
[向执行层下发刚性控制量 (EBS 独立单轮制动 / ASR 扭矩干预)]
1.4.4 VMC 层主挂一体化分布式安全控制与物理平账
控制主权移交至车辆运动控制(VMC)层后,底盘控制核利用车规级确定性几何物理模型,对商用车进行毫秒级的多轴独立分布式制动平账:
-
针对高速蛇形摆动(Swaying)的物理平账策略
VMC 避开大模型的全局规划,直接控制商用车电子制动系统(EBS)进行差动制动。系统通过向挂车后轴(通常是最后一轴的左右两侧轮轮流施加非对称制动脉冲)施加与摆动方向相反的纠偏横摆力矩,利用挂车自身的纵向拉伸效应(Stretching Effect)强行收敛摆动能量。
-
针对折头(Jackknifing)的临界极限防爆策略
当系统判定折头风险激活时,VMC 启动最高优先级防御算法:
-
牵引车轴制动力释放:立即减小牵引车后轴(驱动轴)的制动压力,激活 ABS,确保后轮恢复侧向附着力。
-
挂车全量制动:单边或双边以最大气路压建立速度(≤ 100ms 压摆至 6.5bar 极限压力)对挂车实施全量制动(Trailer-Only Braking),利用挂车强大的纵向拖拽力将折叠的牵引车"原位拉直",在物理极限边界内挽救整车动力学姿态。
-