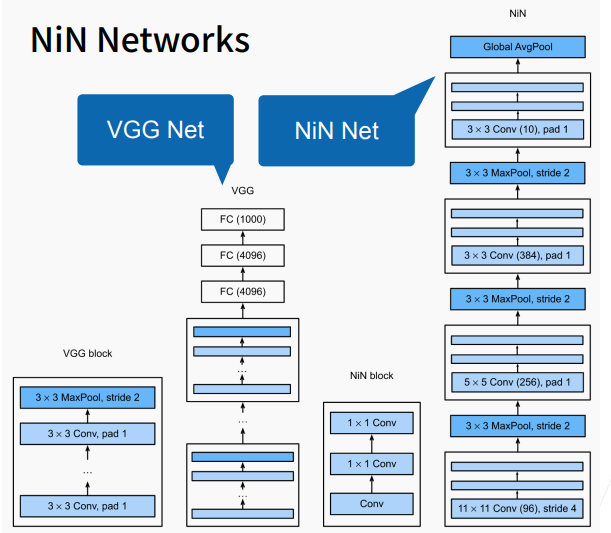
1. NiN网络
2. 总结
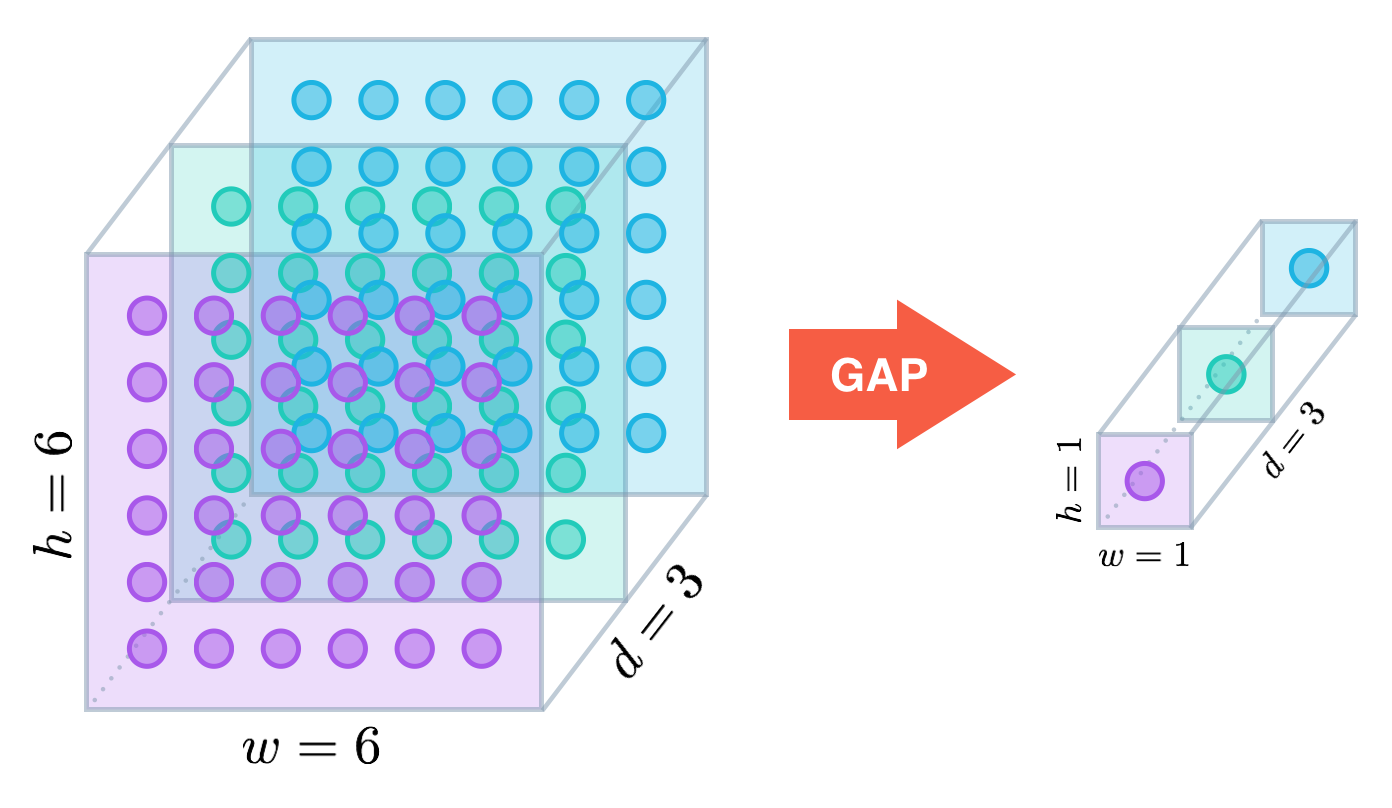
① 在全局平均池化层(GAP)被提出之前,常用的方式是将feature map直接拉平成一维向量,但是GAP不同,是将每个通道的二维图像做平均,最后也就是每个通道对应一个均值。
② 假设卷积层的最后输出是h × w × d 的三维特征图,具体大小为6 × 6 × 3,经过GAP转换后,变成了大小为 1 × 1 × 3 的输出值,也就是每一层 h × w 会被平均化成一个值,如下图所示。
③ GPA优势:
-
抑制过拟合。直接拉平做全连接层的方式依然保留了大量的空间信息,假设feature map是32个通道的10 * 10图像,那么拉平就得到了32 * 10 * 10的向量,如果是最后一层是对应两类标签,那么这一层就需要3200 * 2的权重矩阵,而GAP不同,将空间上的信息直接用均值代替,32个通道GAP之后得到的向量都是32的向量,那么最后一层只需要32 * 2的权重矩阵。相比之下GAP网络参数会更少,而全连接更容易在大量保留下来的空间信息上面过拟合。
-
输入尺寸更加灵活。在第1点的举例里面可以看到feature map经过GAP后的神经网络参数不再与输入图像尺寸的大小有关,也就是输入图像的长宽可以不固定。
1. NiN网络(使用自定义)
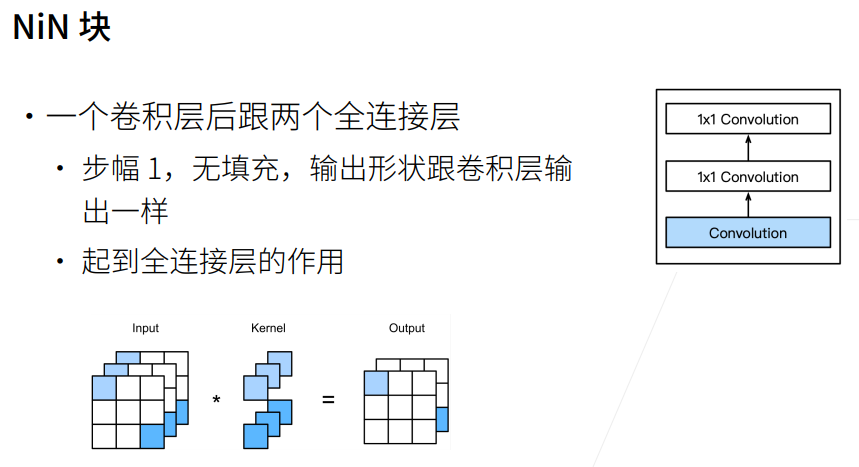
nin_block模块:
第一层卷积 :
nn.Conv2d(in_channels, out_channels, kernel_size, strides, padding)标准二维卷积,卷积核尺寸由外部传入(比如 11×11、5×5、3×3),负责提取空间局部特征,同时调整通道数和特征图尺寸。第二层卷积 :
nn.Conv2d(out_channels, out_channels, kernel_size=1)1×1 卷积(逐点卷积),不改变特征图的宽高,只在通道维度做特征融合与非线性映射。第三层卷积 :
nn.Conv2d(out_channels, out_channels, kernel_size=1)第二个 1×1 卷积,进一步在通道维度做特征变换,叠加网络的非线性表达能力。中间穿插的 3 个
nn.ReLU()都是激活函数,不属于卷积层或全连接层。NiN 的核心设计之一,就是用 1×1 卷积 来替代传统全连接层的部分作用:
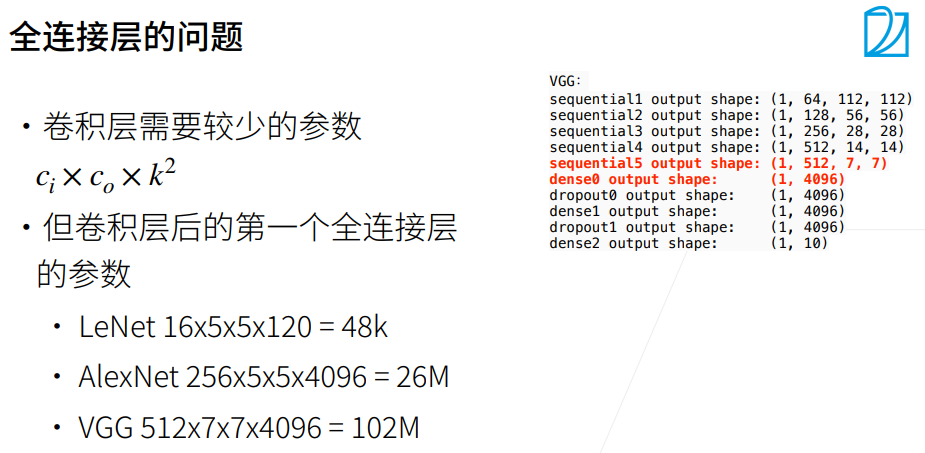
- 全连接层(
nn.Linear)需要把特征图展平,会破坏空间结构,且参数量巨大;- 1×1 卷积可以在保留空间维度的前提下,实现通道间的特征组合,等效于 "对每个空间位置共享权重的全连接",但它本质上仍然属于卷积层,并不是全连接层。
也正是靠这种设计,整个 NiN 网络最终可以用全局平均池化替代分类头的全连接层,大幅减少参数量、缓解过拟合。
python
import torch
from torch import nn
from d2l import torch as d2l
def nin_block(in_channels, out_channels, kernel_size, strides, padding):
return nn.Sequential(nn.Conv2d(in_channels, out_channels, kernel_size, strides,padding),
nn.ReLU(), nn.Conv2d(out_channels, out_channels, kernel_size=1),
nn.ReLU(), nn.Conv2d(out_channels, out_channels, kernel_size=1),
nn.ReLU())
net = nn.Sequential(nin_block(1,96,kernel_size=11,strides=4,padding=0),
nn.MaxPool2d(3,stride=2),
nin_block(96,256,kernel_size=5,strides=1,padding=2),
nn.MaxPool2d(3,stride=2),
nin_block(256,384,kernel_size=3,strides=1,padding=1),
nn.MaxPool2d(3,stride=2),nn.Dropout(0.5),
nin_block(384,10,kernel_size=3,strides=1,padding=1),
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten())
# 查看每个块的输出形状
X = torch.rand(size=(1,1,224,224))
for layer in net:
X = layer(X)
print(layer.__class__.__name__, 'output shape:\t', X.shape)
Sequential output shape: torch.Size([1, 96, 54, 54]) MaxPool2d output shape: torch.Size([1, 96, 26, 26]) Sequential output shape: torch.Size([1, 256, 26, 26]) MaxPool2d output shape: torch.Size([1, 256, 12, 12]) Sequential output shape: torch.Size([1, 384, 12, 12]) MaxPool2d output shape: torch.Size([1, 384, 5, 5]) Dropout output shape: torch.Size([1, 384, 5, 5]) Sequential output shape: torch.Size([1, 10, 5, 5]) AdaptiveAvgPool2d output shape: torch.Size([1, 10, 1, 1]) Flatten output shape: torch.Size([1, 10])
python
# 训练模型
lr, num_epochs, batch_size = 0.1, 10, 128
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=224)
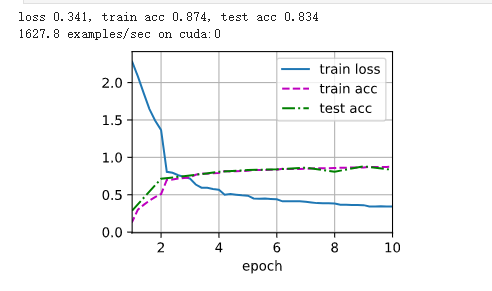
d2l.train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())loss 0.341, train acc 0.874, test acc 0.834
1627.8 examples/sec on cuda:0