针对地下停车场高密度桩标、光线突变与低矮障碍物等复杂场景,研究提出多模态感知融合与安全冗余策略。通过4D雷达与视觉体素化校验解决桩标粘连问题;光流-IMU时空补偿应对光照跳变;占用网格动态掩码检测低矮障碍物,并触发权重降级与VMC层越权制动。系统集成置信度过滤、物理对账和硬件熔断机制,确保在传感器失效或模型误判时仍能实现安全闭环控制,显著提升自动驾驶在非结构化地库环境中的鲁棒性。
1.3 地库高密度桩标、光线突变与低矮障碍物的特征识别工况
1.3.1 地库高密度桩标空间的几何冲突与特征提取卡闸
地下停车场属于典型的高密度、高重叠、非结构化封闭空间。其内部柱体(直径通常 ≥ 0.6m)、消火栓、多层机械车位钢结构件排列密集,且空间通道狭窄(通车道宽度通常为 5.5m~6.0m)。
-
大模型空间特征混淆机制
-
空间交叉注意力机制失真:端到端大模型(VLA)在处理多摄像头拼接的环视鸟瞰图(BEV)特征时,由于桩标排列过于紧密且纹理高度相似,长距离依赖的自注意力矩阵易将不同支柱的几何特征连通,导致场景重建中出现"几何拓扑粘连",无法准确切分通行边界(Free Space)。
-
超近距离点云盲区与多径自激:4D成像雷达与传统超声波雷达在面对环氧树脂地面和密集金属柱体时,会产生严重的镜面多径反射,在感知层形成伪虚拟障碍物点云(Ghost Points)。同时,当距离 < 0.3m 时,传感器进入物理盲区。
-
-
高刚性点云密度与信噪比(SNR)前置卡闸
为防止大模型因特征污染导致车辆刮蹭,感知输入端设立刚性卡闸。系统对超近距离(0.5m~3m)空间设立特征置信度过滤器,强制规定:
-
4D成像雷达反射点云的信噪比 SNR ≥ 25dB 方可进入聚类链路。
-
必须通过环视相机生成的 Occupancy 占用网络网格(Grid Size ≤ 5\cm × 5cm)对点云进行空间体素化交集校验。若无视觉体素激活,则判定雷达点云为多径自激噪声并予以剔除。
-
1.3.2 光线剧烈跳变(黑盲/白盲效应)的暂态物理对账
车辆由露天环境驶入地下停车场、或在地下停车场通过明暗交替的坡道时,光照强度可在 100ms 内发生 10^4 Lx 级别的量级跳变。
-
互补金属氧化物半导体(CMOS)传感器动态范围(WDR)局限
在光线骤降(黑盲效应)或骤升(白盲效应)的暂态(持续约 200ms ~ 500ms,受相机自动曝光 AE 算法收敛速度限制),环视相机输出的图像会出现大面积曝光过度或局部极度欠曝光。此时,大模型的视觉前级 Backbone 网络将丢失所有的纹理和边缘特征,导致端到端模型输出的期望控制量发生高频跳变。
-
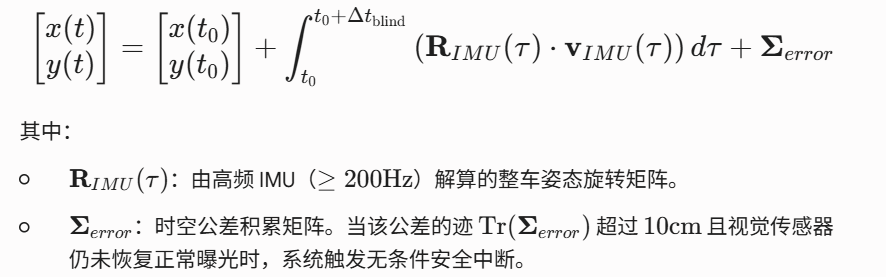
物理对账与时空公差补偿方程
系统在底软层引入基于光流法(Optical Flow)与惯性导航(IMU)状态外推的瞬态物理对账方程。在相机曝光未收敛的 Delta t_blind 时间窗口内,系统切断大模型对整车控制流的直接控制主权,通过以下动力学公式维持局部车位线与桩标的位置估计:
1.3.3 低矮障碍物(地锁、轮速止动杆)特征级克星场景解耦
地锁(高度 10cm ~ 20cm)、水泥止动杆(高度 ≤12cm)以及地库地面凹坑,属于传统 3D 目标检测(Bounding Box)和高仓位雷达的感知盲区。
-
大模型幻觉与漏检机制
由于低矮障碍物在 BEV 特征图上的投影面积小,极易在降采样(Downsampling)网络中被过滤丢弃。端到端大模型的控制网络由于缺乏此类长尾场景(Edge Cases)的泛化数据,易将其识别为平坦地面,从而直接输出通行指令,导致底盘、连杆或电池包托底。
-
三维体素动态掩码与权重再分配(Dynamic Masking)
为对冲大模型的幻觉漏检,系统引入基于空间占用网格(Occupancy Network)的边缘特征硬隔离机制。
[传感器物理输入: 环视视觉 / 近场固态激光雷达]
│
▼
[空间占用网络 (Occupancy Network) 5cm 体素化检测]
│
├──► 空间占用被激活 (高度 > 7cm) ────► 激活 SOTIF Risk Tag
│ │
└──► 未激活 (平坦地面) ▼
[降级大模型 Confidence Weight (0.9 ➔ 0.1)]
│
▼
[越权切换: 传统几何规则防托底策略启动]
-
空间占用激活 :当车辆行驶路径前方 3m 范围内,Occupancy 网络的立体体素(Voxel)在高度方向(Z 轴)有连续两个以上网格被激活(高度 > 7cm),且持续 3帧 以上,系统自动在中间件层对该区域施加 SOTIF 风险标签(Risk Tag)。
-
权重再分配:后端算法接收到 Risk Tag 后,将大模型对该冲突区域的路径规划权重(Confidence Weight)从 0.9 强行降级至 0.1,转而调用传统几何规则防御策略,强制向 VMC 层发送限速(v ≤ 3km/h)或原位驻车指令。
1.3.4 VMC 层低速高刚性防御与越权拦截
当大模型在低矮障碍物场景下依然输出期望扭矩或加速指令时,底盘控制(VMC)层启动最后一道刚性物理防御:
-
驱动防滑与滑移率高频监控
VMC 控制核以 1ms 的中断周期高频计算四个车轮的实时滑移率 lambda。当车轮压上轮速止动杆或地锁、电机输出扭矩增大但整车加速度 \\frac{dv}{dt} 趋于 0(滑移率异常突变)时,判定车辆受阻。
-
硬件越权拦截(Override)
VMC 传统的车规级安全逻辑将原位熔断端到端模型的控制链。系统切断期望驱动扭矩信号,并直接向电子驻车系统(EPB)或制动执行器(ESC)下发最大 15kN 的驻车制动压力,实现物理层面的防托底与防碰撞闭环。