前言
这段时间在和学弟打软件杯的比赛,有项任务就是机器人的视觉巡线,这虽然不是什么稀奇的事情,但是对于一开始不了解视觉的我来说可以说是很懵了,所以现在就想着和大家分享一下,来看看是如何基于opencv来实现巡线的。我这里以ubuntu20.04为例了
正文
1.查看相机设备
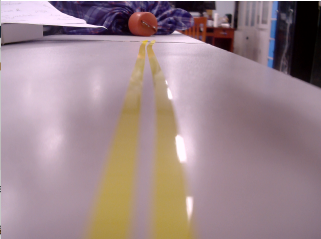
首先要完成视觉巡线那必不可少的就是相机了,使用
ll /dev/video*来查看相机。

这里可以看到我有两个相机设备,一个是我电脑自带的相机video0,另一个是我的usb相机video1。
2.显示实时图像
新建一个工作空间,然后新建一个cpp文件,然后进行相机的初始化,以及调用窗口实时显示图像
#include <opencv2/opencv.hpp>
#include <iostream>
#include <chrono>
using namespace std;
int camera_width = 640;
int camera_height = 480;
int main(int argc, char const *argv[])
{
// 初始化变量和对象
cv::VideoCapture cap(1);
cap.set(CAP_PROP_FRAME_WIDTH, camera_width);
cap.set(CAP_PROP_FRAME_HEIGHT, camera_height);
// 循环处理每一帧图像
while (true) {
cv::Mat color_image;
cap.read(color_image);
if (color_image.empty()) {
cerr << "Failed to capture image" << endl;
break;
}
imshow("Color Image", color_image);
char key = waitKey(1);
if (key == 'q') {
break;
}
}
// 释放资源
cap.release();
destroyAllWindows();
return 0;
}这里初始化cv::VideoCapture cap(1)传入的参数就是上面查看到的设备,如果想要调用系统自带相机,那就改为cap(0)。
3.巡线函数
我这里函数声明如下:
tuple<cv::Mat, float, bool, bool, bool> followBlindPath(cv::Mat color_image) 由于我想要多个返回值所以就采用了tuple模版,后面采用tie函数进行解包,其中输入参数为要识别的图片,输出参数分别为经识别后标记的图片,以及水平方向上偏差(后面会具体解释是什么偏差),后面三个布尔值表示三个状态,分别为巡线,转弯和停止。
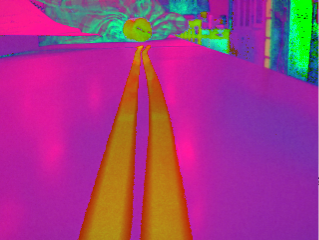
在识别开始之前,由于图片在opencv保存的格式默认为BGR格式图片,我们要转为HSV格式,因为后面的操作都是基于HSV图片进行的。
cv::cvtColor(color_image, hsvFrame, COLOR_BGR2HSV);效果如下:
然后指定HSV的色域,scalar函数三个参数分别为色调(Hue)、饱和度(Saturation)和亮度(Value),我这里设置的值为黄色的色域。
cv::Scalar color_lower = cv::Scalar(10, 40, 120);
cv::Scalar color_upper = cv::Scalar(40, 255, 255);
cv::inRange(hsvFrame, color_lower, color_upper,color_mask);inRange函数用于判断一个像素或像素矩阵是否在指定的范围内,hsvFrame是输入图像,返回图像color_mask是一个二值图像,即在色域内的为白色,色域外为黑色。
处理效果如下:
点击基于opencv的视觉巡线实现 - 古月居可查看全文