1 研究背景
1.1 概述
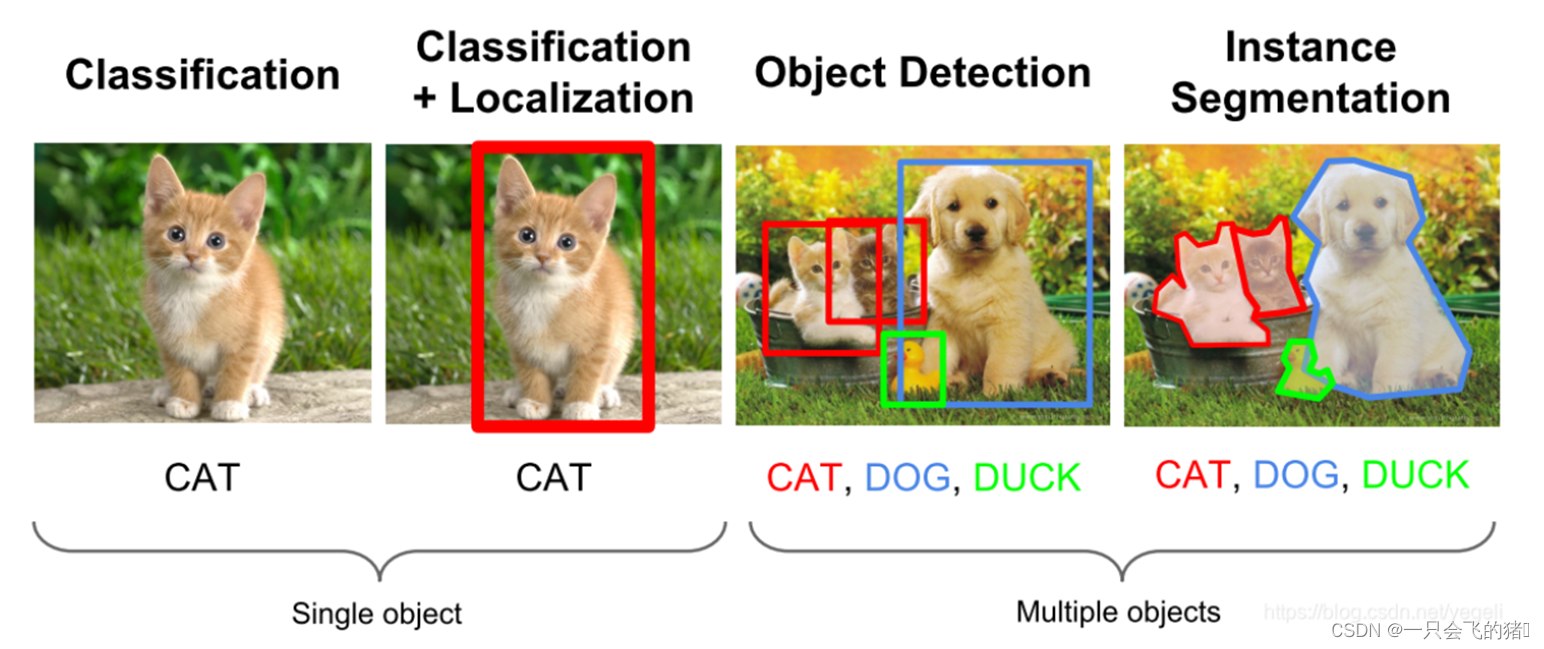
目标检测是计算机视觉的重要分支,主要任务是在给定的图片中精确找到物体所在位置,并标注出物体的类别,即包含了目标定位与目标分类两部分。在计算机视觉领域中的目标跟踪、图像分割、事件检测、场景理解等的任务都以目标检测作为基础。
 目标检测
目标检测  目标检测算法发展时间轴
目标检测算法发展时间轴
1.2 深度学习算法比较
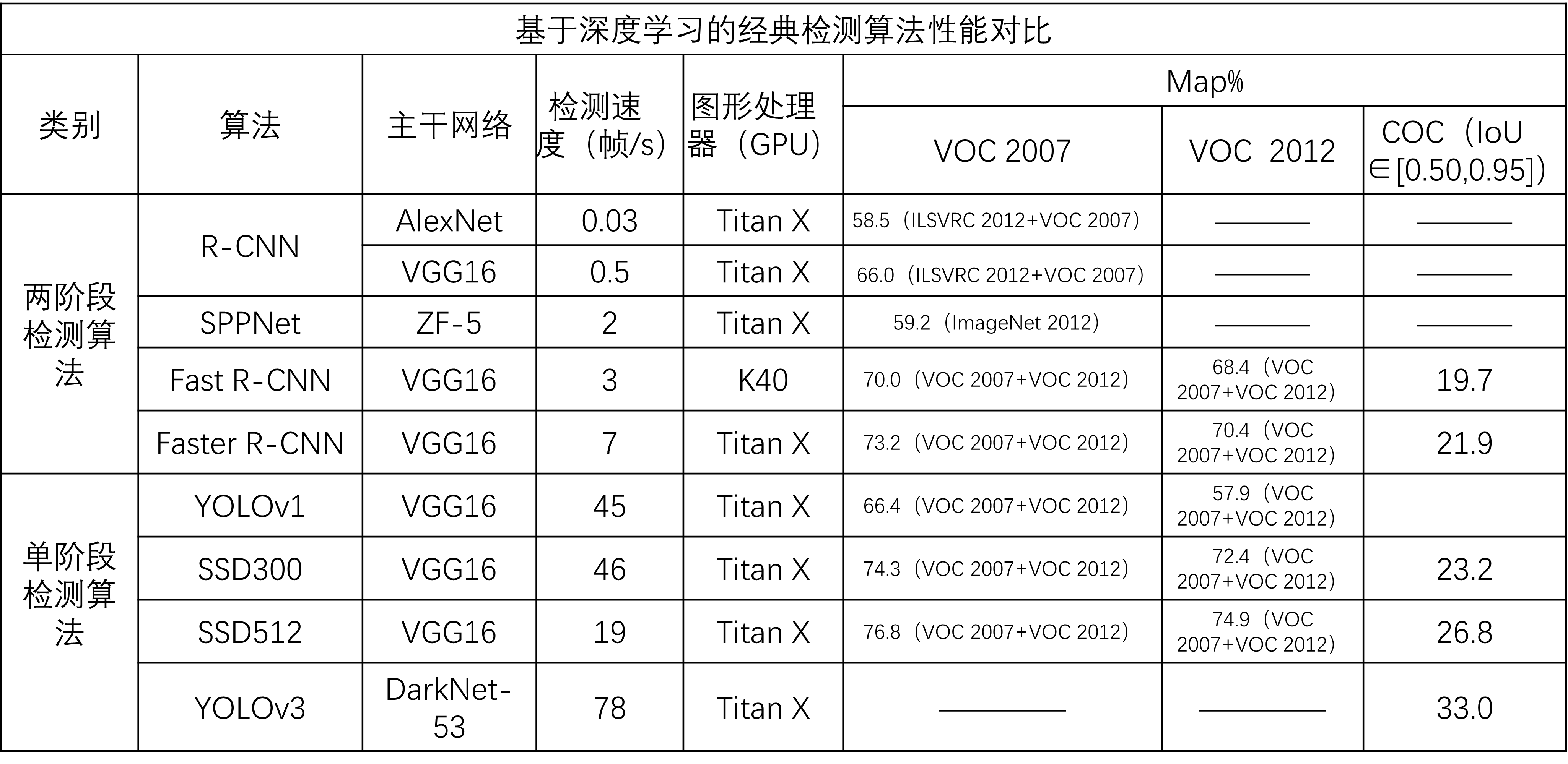
在基于深度学习算法的目标检测算法主要分两类:One-Stage与Two-Stage,比较如下图:
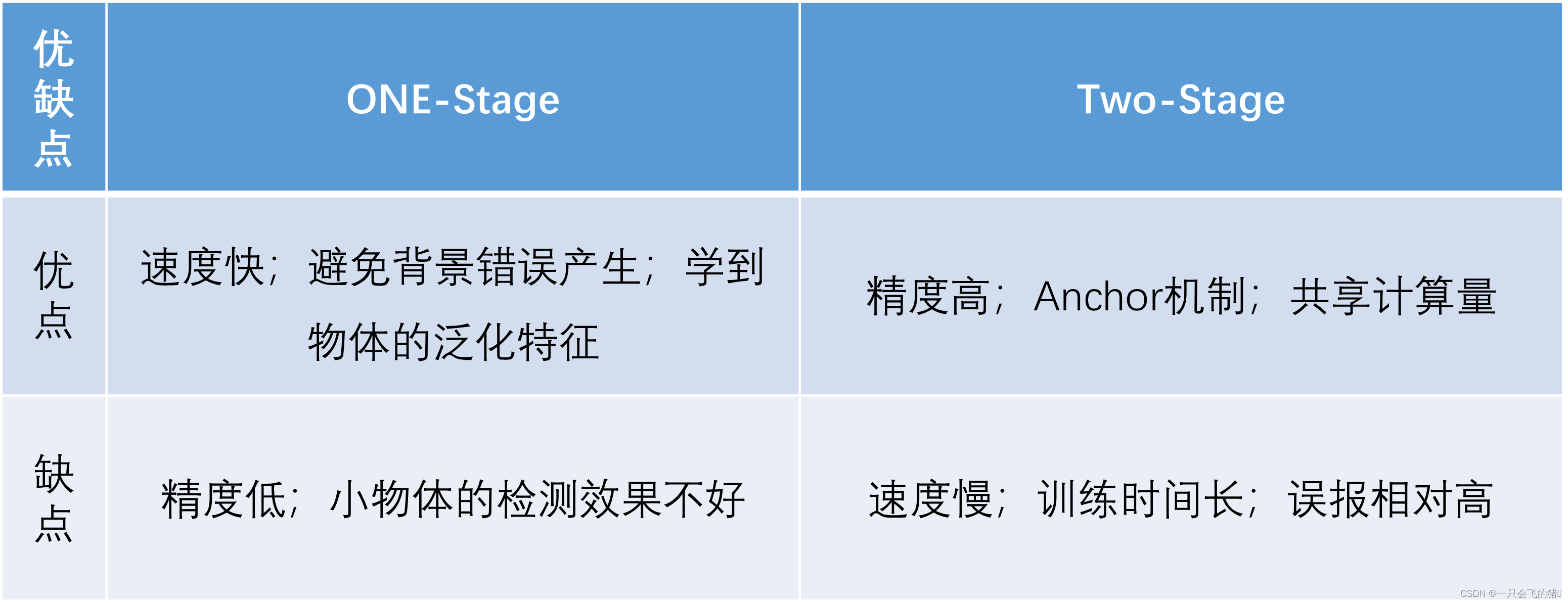 One-Stage和Two-Stage比较
One-Stage和Two-Stage比较
主要算法:
One-Stage:YOLO系列(v1-v5),SSD系列(R-SSD、DSSD、FSSD等),Retina-Net
Two-Stage:RCNN系列(Fast-RCNN、Faster-RCNN、Mask-RCNN),SPPNet,R-FCN。
1.3 常用数据集
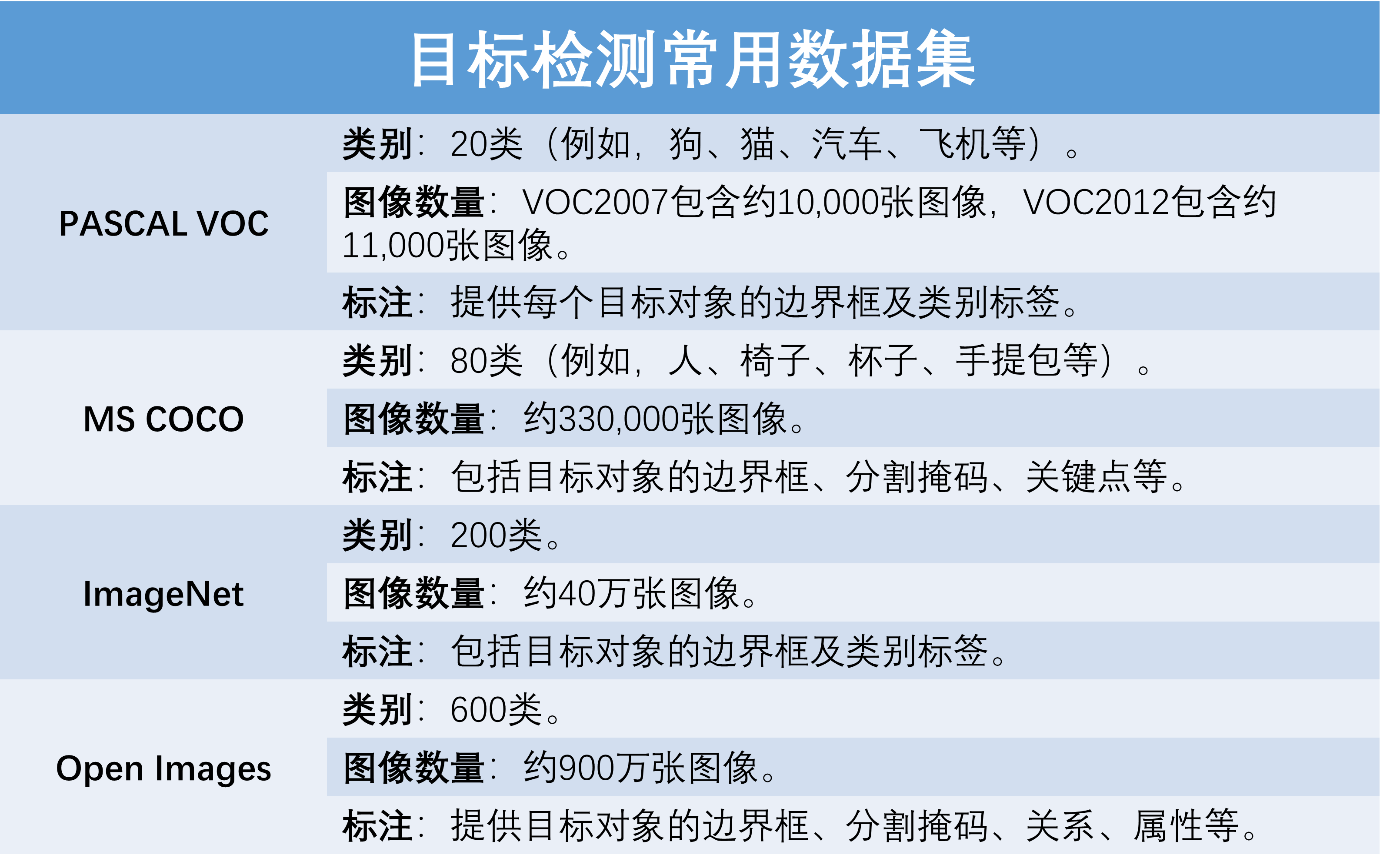
目标检测常用数据集是用于训练和评估目标检测模型的重要资源。这些数据集通常包含大量带有标注信息的图像,包括目标对象的类别和边界框。
 常用数据集
常用数据集
1.4 评价指标
传统检测器在行人检测的应用研究中,以每个窗口的漏检率与误报率作为检测器性能的度量标准。卷积神经网络的应用和检测器检测方法改变后,以平均检测精度作为同类检测准确性的评价指标,以类平均检测精度作为不同类别间的平均AP,以表现目标检测算法检测精度的综合性能,并引入交并比来描述目标检测算法的定位准确性。
 评价指标
评价指标
2 传统目标检测方法
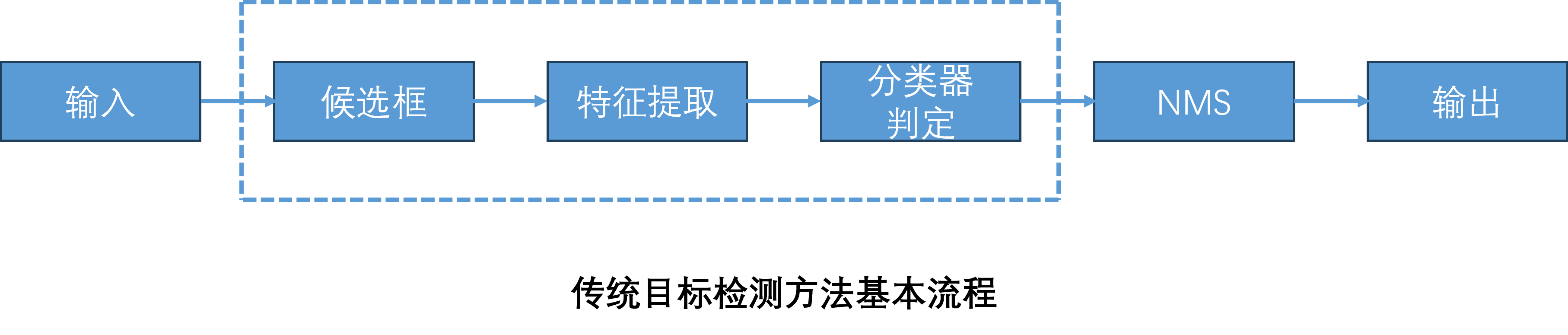
早期的目标检测算法大多是基于人工设计滤波器特征构建的。通过滑动窗口的方法对待检测图片提取候选框,接着进行特征提取,然后利用分类器进行分类判定。通过非极大值抑制(NMS)可以对候选框进行合并,消去重叠或冗余的候选框,输出最终结果。典型算法有2001年的V-J(Viola-Jones)检测算法、2006年诞生的HOG+SVM检测算法和2008年诞生的DPM算法等。然而,这种方法使得滑动窗口的计算量随着图像像素的增加呈指数增长,且手工设计的特征对于目标多样性的变化并没有很好的鲁棒性,检测效率和精度都不高。
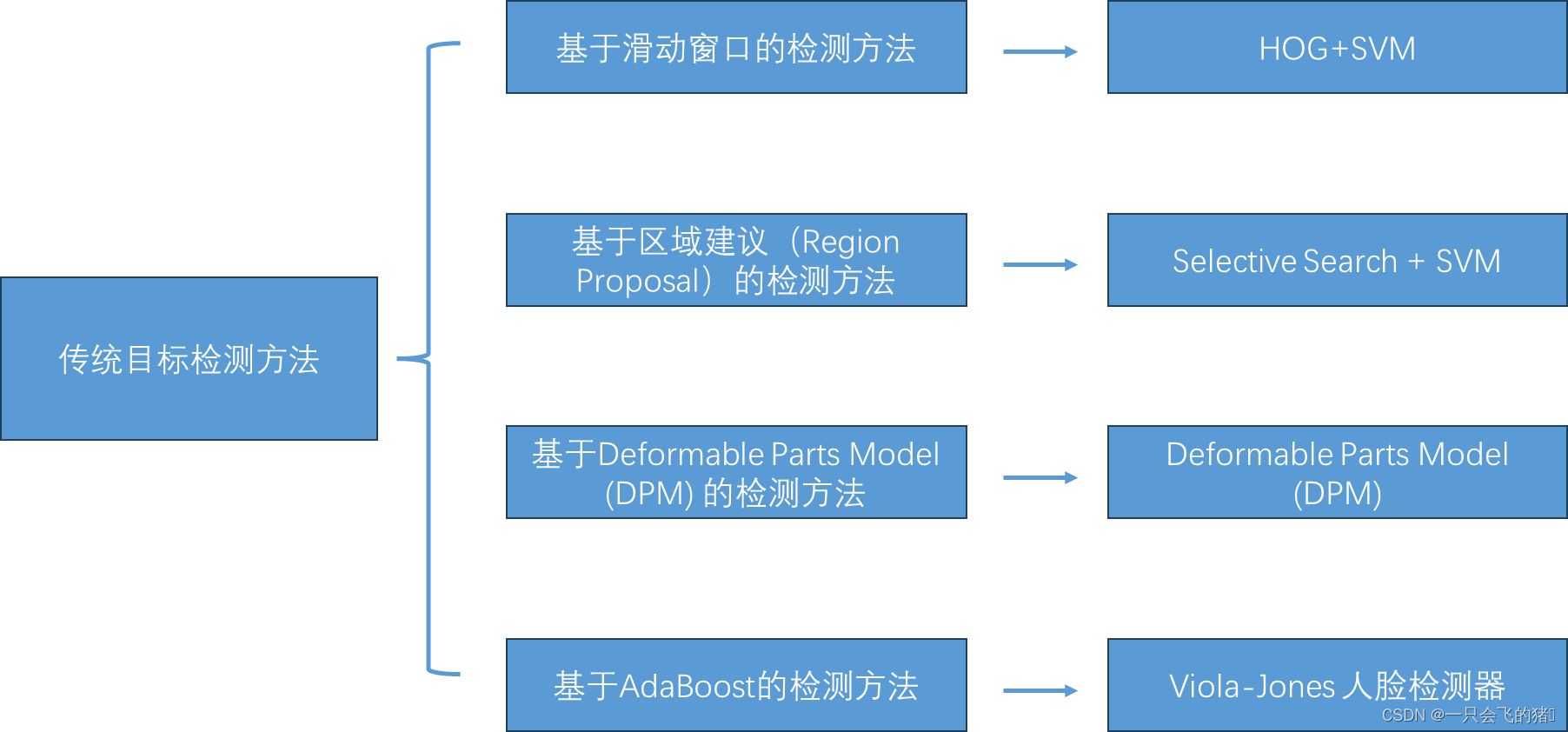 传统目标检测分类
传统目标检测分类
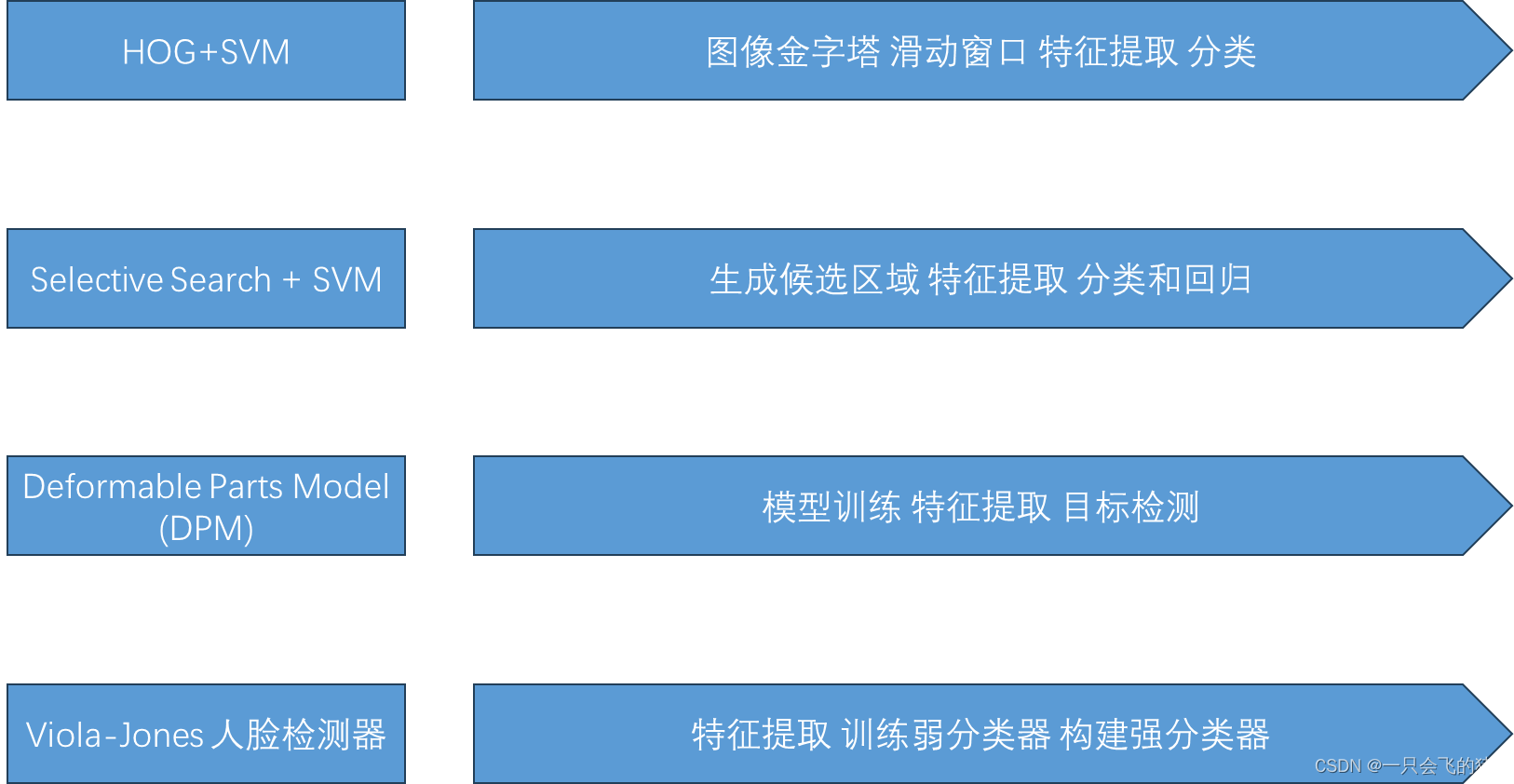 代表方法的实现
代表方法的实现
传统目标检测方法通常依赖于手工设计的特征(如HOG、SIFT、Haar-like)和经典的机器学习算法(如SVM、AdaBoost)。虽然这些方法在一定程度上取得了成功,它们通常存在以下局限性:
- 特征表达能力有限:手工设计的特征无法捕捉图像中丰富的高层语义信息。
- 计算复杂度高:滑动窗口方法计算量大,实时性差。
- 鲁棒性不足:对目标的形变、遮挡和光照变化等情况适应性差。
3 两阶段检测算法
两阶段目标检测算法是当前目标检测领域中最为经典且广泛应用的一类方法。它们的核心思想是将目标检测任务分为两个阶段:首先生成候选区域(Region Proposals),然后对这些候选区域进行分类和边界框回归。这种方法的代表性算法包括R-CNN系列(R-CNN, Fast R-CNN, Faster R-CNN)和Mask R-CNN等。
 两阶段检测算法时间流程图
两阶段检测算法时间流程图
两阶段算法首先根据输入的图像生成候选框(Region Proposals),候选框的生成方法可分为选择性搜索和基于锚框的方法。选择性搜索首先对图像进行分割,得到一些小的区域,然后通过合并相邻的区域,得到一些更大的候选框,最后对这些候选框进行筛选,保留与目标物体较为相似的候选框。基于锚框的方法先在图像上生成一些固定大小和宽高比的锚框,然后通过卷积神经网络对每个锚框进行分类和回归,得到每个锚框的置信度和位置偏移量,最后根据置信度对锚框进行筛选,保留置信度较高的候选框。
 单阶段目标检测结构表征
单阶段目标检测结构表征

两阶段目标检测算法通过将候选区域生成和目标检测分为两个阶段,对传统的目标检测方法进行了优化和改进,其优点和缺点如下:
优点:
- 高精度:在候选区域生成后进行进一步的精细分类和回归,通常在准确性上表现优异。
- 处理复杂背景和小目标物体:候选区域生成阶段提供了初步的筛选,减少了背景干扰,精细检测阶段则进一步提高了检测质量。
- 候选区域质量高:通过RPN等机制生成的候选区域质量较高,减少了误检和漏检,提高了检测的整体性能。
缺点:
1、计算效率低 2、实现复杂性高 3、对于硬件资源要求高
4 单阶段检测算法
单阶段目标检测算法是一类在单个网络中同时完成候选区域生成和目标分类的算法,具有更高的检测速度。它们直接在特征图上进行密集预测,不像两阶段方法那样先生成候选区域再进行精细检测。
 单阶段检测算法时间流程图
单阶段检测算法时间流程图
单阶段检测算法通过简单的一次网络处理即可成功输出检测分类和预测框的边界,如图8所示。因此该类检测算法具备良好的检测速度,适合移动端使用,同时为算法模块的添加保留了足够的结构空间,用以实现检测应用的各种需求。
 单阶段目标检测结构表征
单阶段目标检测结构表征
单阶段目标检测算法可以划分为四种网络,分别是YOLO全系、SSD、RetinaNet、EfficientDet。YOLO自问世到现在已经发展至YOLOv10,其网络结构不断更替改进,性能不断提升,开源代码使得其被广泛使用。


单阶段目标检测算法在单个网络中同时完成候选区域生成和目标分类的算法,其改进了两阶段目标检测的算法性能。其主要优缺点如下:
优点:
- 高检测速度:单阶段方法将候选区域生成和目标检测整合在一个网络中,简化了处理流程,减少了计算量。
- 实现简单:单阶段方法的网络结构较为简单,只有一个网络模块,避免了复杂的候选区域生成和二次处理步骤。
- 端到端训练:单阶段方法通常可以进行端到端的训练,不需要像两阶段方法那样需要单独训练候选区域生成器和检测器。
缺点:
1、精度相对较低 2、模型调优复杂 3、正负样本不均衡
5 总结和展望
简单介绍了传统目标检测方法的概念和结构,针对传统目标检测方法存在的问题,分析了基于卷积神经网络的目标检测算法的发展历程,根据检测算法分类综述了具有代表意义的检测器,包括R-CNN系列算法、YOLO系列算法和SSD算法等。
在目标检测算法发展过程中,通过模型结构改进(如增加卷积层、改变激活函数等)提高了模型的准确率和速度,通过数据增强(如旋转、翻转、裁剪等)增加了数据样本的多样性并提高了模型的泛化能力,利用损失函数改进(如使用聚焦损失提高了模型对难样本的处理能力,通过将多个目标检测器进行融合提高了目标检测的准确率和鲁棒性,通过对GPU、现场可编程门阵列等硬件进行优化提高了目标检测算法的速度和效率。
在目标检测算法研究中,如何针对应用需求改进和创新检测算法仍值得思考,未来可能的研究方向包括以下几个方面:
更快的检测速度。 随着物联网和边缘计算的发展,越来越多的应用场景需要实时目标检测。因此,目标检测算法需要更快的速度,以满足实时性要求。未来的研究方向包括更轻量级的网络结构、更高效的计算方法、更优化的硬件设备等。
更高的定位精度。 目标检测算法的定位精度对于一些应用场景非常重要,如医学影像分析、工业质检等。未来可以通过研究更深、更宽的神经网络结构、更有效的特征提取方法、更精细的目标分类方法等实现定位精度和检测效率的提升。
轻量级目标检测算法。 从 YOLOv3 开始,首次体现了移动设备对轻量级算法的需求。检测速度和精度得以保证之始,应用级的需求就开始向更轻、更便捷的方向转变,如移动机器人的目标识别抓取、农业应用等。尽管目前的检测算法在检测精度方面已经超越人类,但在细节和功能性上仍不及人眼,尤其是足够轻足够小的检测算法。
小目标检测。 YOLO 等结构简单的算法对小目标的检测失真,导致泛化能力低下,解决了小目标检测问题的算法检测速度较低而应用受限。
目标检测的多模态融合。 自动驾驶汽车凭借多种传感器实现对驾驶环境的机器识别,目标检测不仅可以通过图像进行,可以通过声音、红外线、雷达等多种传感器进行。将来自不同传感器的数据进行融合,从而实现对目标更加准确和全面地进行检测,可以使信息互补,实现误差校正、多样性增强以及实时性提高。
目标检测的场景自适应。 目标检测算法不同场景下的表现可能存在差异,通过自适应学习等方法,提高目标检测算法在不同场景下的准确率和鲁棒性,将极大提升目标检测在各行业中的应用泛化性能。
注意力机制。 检测算法区域划分、锚框选定等操作经常出现检测算法复杂性徒增的问题,注意力机制的引入能够大幅降低检测成本,高效关注图像有用信息,使现有检测算法检测性能快速提升成为可能。