前言
给出自适应容积卡尔曼滤波(ACKF)的MATLAB代码。
主要思想
通过自适应状态协方差Q来实现,得到了比传统方法更低的估计误差。适用于Q无法获取、估计不准、变化不定的情况,只有一个M文件,方便运行,保运行成功,不包讲解。
运行截图
三轴状态的估计曲线:

状态误差的曲线如下:
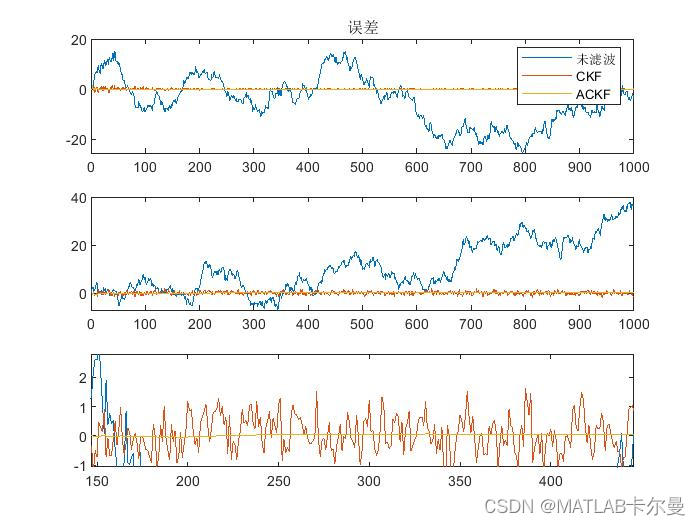
因为未滤波的误差太大了,将中间红色和黄色部分放大一点,得到下图:

能明显看出来ACKF的误差更小。
同时,程序还输出了误差的CDF图像,供参考:

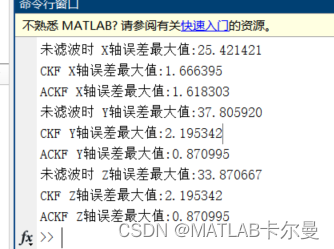
误差的统计特性如下:
代码结构
代码文件由以下几个部分组成:
源代码
matlab
% CKF与ACKF效果对比,自适应调节Q
% Evand©2024
% 作者联系方式:evandjiang@qq.com(除前期达成一致外,付费咨询)
% 2024-5-30/Ver1/
clear;clc;close all;
rng(0);
%% 滤波模型初始化
t = 1:1:1000;
Q0 = 1*diag([1,1,1]);w=sqrt(Q0)*randn(size(Q0,1),length(t));
R0 = 1*diag([1,1,1]);v=sqrt(R0)*randn(size(R0,1),length(t));
P0 = 1*eye(3);
X=zeros(3,length(t));
X_ekf=zeros(3,length(t));
X_ekf(:,1)=X(:,1);
Z=zeros(3,length(t)); %定义观测值形式
Z(:,1)=[X(1,1)^2/20;X(2,1);X(3,1)]+v(:,1); %观测量
%% 运动模型
X_=zeros(3,length(t));
X_(:,1)=X(:,1);
for i1 = 2:length(t)
X(:,i1) = [X(1,i1-1) + (2.5 * X(1,i1-1) / (1 + X(1,i1-1).^2)) + 8 * cos(1.2*(i1-1));
X(2,i1-1)+1;
X(3,i1-1)]; %真实值
X_(:,i1) = [X_(1,i1-1) + (2.5 * X_(1,i1-1) / (1 + X_(1,i1-1).^2)) + 8 * cos(1.2*(i1-1));
X_(2,i1-1)+1;
X_(3,i1-1)] + w(:,i1-1);%未滤波的值
Z(:,i1) = [X(1,i1).^2 / 20;X(2,i1);X(3,i1)] + v(i1); %观测值
end
%% CKF
Q = Q0*2; %人工构造Q不准确的情况
% 完整代码下载链接:https://gf.bilibili.com/item/detail/1105551012
R = R0;
P = P0;