文件位置
openh264/codec/processing/src/BackgroundDetection.cpp
代码流程
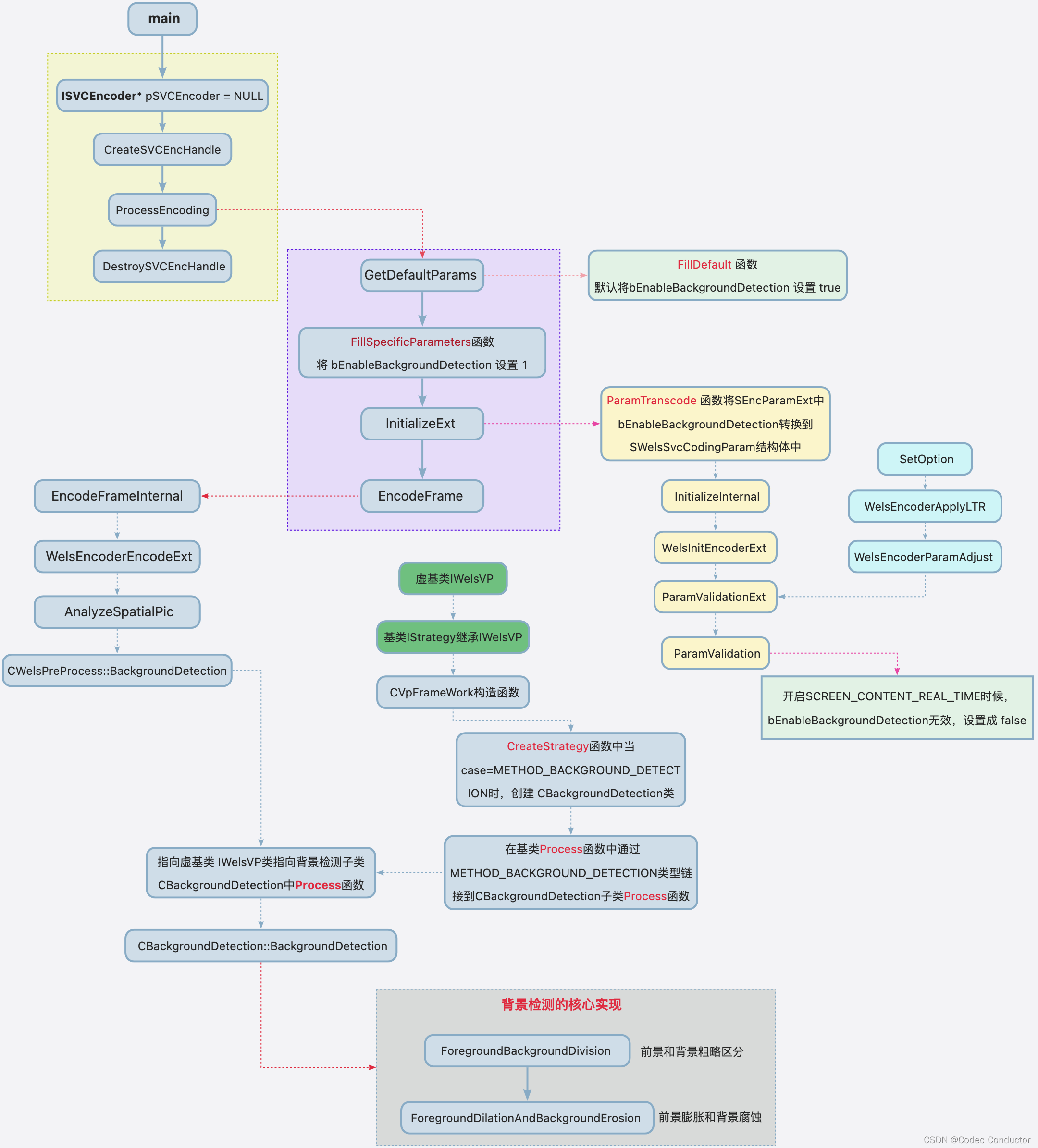
- 核心函数
- 从代码流程可以看到实现背景检测的核心功能主要是CBackgroundDetection类中
ForegroundBackgroundDivision函数和ForegroundDilationAndBackgroundErosion函数。
原理
- 参数开关控制:(bool)bEnableBackgroundDetection
ForegroundBackgroundDivision 函数
- 功能:前景和背景粗略区分
- 原理过程:
- 计算以宏块为单位的图像宽iPicWidthInOU和高iPicHeightInOU;
- 计算每行的宏块个数iPicWidthInMb;
- 声明并初始化指向Background OU数组的指针,该数组内部是宏块级OU 的数据信息;
- 双层for 循环遍历所有宏块级 OU单元;
- 调用GetOUParameters函数获取 OU 参数,主要是iSD、iSAD、ISD、iMAD、iMinSubMad、iMaxDiffSubSd;
- 当前 OU背景标志iBackgroundFlag赋值 0;
- 如果当前OU的平均绝对偏差(Mean Absolute Difference,MAD)大于63,则跳过当前OU;移动到下一个 OU;
- 如果当前 OU 的iMaxDiffSubSd小于等于iSAD / 8或者iMaxDiffSubSd小于等于16x8,且iSAD小于2x16x16x2;
- 如果iSAD小于16*8,则当前OU背景标志iBackgroundFlag 赋值 1;
- 否则,当前OU背景标志iBackgroundFlag 的计算公式如下:
- 如果当前 OU 的iSAD 小于2x16x16,判断当前 OU 的iSD是否小于iSADx3 / 4,将大小关系结果赋值给iBackgroundFlag;
- 否则,判断当前 OU 的iSDx2 是否小于当前 OU 的iSAD,将大小关系结果赋值给iBackgroundFlag;
- 移动到下一个宏块级OU;
- 原理图 :

- 相关源码:
ForegroundBackgroundDivision函数
void CBackgroundDetection::ForegroundBackgroundDivision (vBGDParam* pBgdParam) {
int32_t iPicWidthInOU = pBgdParam->iBgdWidth >> LOG2_BGD_OU_SIZE;
int32_t iPicHeightInOU = pBgdParam->iBgdHeight >> LOG2_BGD_OU_SIZE;
int32_t iPicWidthInMb = (15 + pBgdParam->iBgdWidth) >> 4;
SBackgroundOU* pBackgroundOU = pBgdParam->pOU_array;
for (int32_t j = 0; j < iPicHeightInOU; j ++) {
for (int32_t i = 0; i < iPicWidthInOU; i++) {
GetOUParameters (pBgdParam->pCalcRes, (j * iPicWidthInMb + i) << (LOG2_BGD_OU_SIZE - LOG2_MB_SIZE), iPicWidthInMb,
pBackgroundOU);
pBackgroundOU->iBackgroundFlag = 0;
if (pBackgroundOU->iMAD > 63) {
pBackgroundOU++;
continue;
}
if ((pBackgroundOU->iMaxDiffSubSd <= pBackgroundOU->iSAD >> 3
|| pBackgroundOU->iMaxDiffSubSd <= (BGD_OU_SIZE * Q_FACTOR))
&& pBackgroundOU->iSAD < (BGD_THD_SAD << 1)) { //BGD_OU_SIZE*BGD_OU_SIZE>>2
if (pBackgroundOU->iSAD <= BGD_OU_SIZE * Q_FACTOR) {
pBackgroundOU->iBackgroundFlag = 1;
} else {
pBackgroundOU->iBackgroundFlag = pBackgroundOU->iSAD < BGD_THD_SAD ?
(pBackgroundOU->iSD < (pBackgroundOU->iSAD * 3) >> 2) :
(pBackgroundOU->iSD << 1 < pBackgroundOU->iSAD);
}
}
pBackgroundOU++;
}
}
}
void CBackgroundDetection::GetOUParameters (SVAACalcResult* sVaaCalcInfo, int32_t iMbIndex, int32_t iMbWidth,
SBackgroundOU* pBgdOU) {
int32_t iSubSD[4];
uint8_t iSubMAD[4];
int32_t iSubSAD[4];
uint8_t (*pMad8x8)[4];
int32_t (*pSad8x8)[4];
int32_t (*pSd8x8)[4];
pSad8x8 = sVaaCalcInfo->pSad8x8;
pMad8x8 = sVaaCalcInfo->pMad8x8;
pSd8x8 = sVaaCalcInfo->pSumOfDiff8x8;
iSubSAD[0] = pSad8x8[iMbIndex][0];
iSubSAD[1] = pSad8x8[iMbIndex][1];
iSubSAD[2] = pSad8x8[iMbIndex][2];
iSubSAD[3] = pSad8x8[iMbIndex][3];
iSubSD[0] = pSd8x8[iMbIndex][0];
iSubSD[1] = pSd8x8[iMbIndex][1];
iSubSD[2] = pSd8x8[iMbIndex][2];
iSubSD[3] = pSd8x8[iMbIndex][3];
iSubMAD[0] = pMad8x8[iMbIndex][0];
iSubMAD[1] = pMad8x8[iMbIndex][1];
iSubMAD[2] = pMad8x8[iMbIndex][2];
iSubMAD[3] = pMad8x8[iMbIndex][3];
pBgdOU->iSD = iSubSD[0] + iSubSD[1] + iSubSD[2] + iSubSD[3];
pBgdOU->iSAD = iSubSAD[0] + iSubSAD[1] + iSubSAD[2] + iSubSAD[3];
pBgdOU->iSD = WELS_ABS (pBgdOU->iSD);
// get the max absolute difference (MAD) of OU and min value of the MAD of sub-blocks of OU
pBgdOU->iMAD = WELS_MAX (WELS_MAX (iSubMAD[0], iSubMAD[1]), WELS_MAX (iSubMAD[2], iSubMAD[3]));
pBgdOU->iMinSubMad = WELS_MIN (WELS_MIN (iSubMAD[0], iSubMAD[1]), WELS_MIN (iSubMAD[2], iSubMAD[3]));
// get difference between the max and min SD of the SDs of sub-blocks of OU
pBgdOU->iMaxDiffSubSd = WELS_MAX (WELS_MAX (iSubSD[0], iSubSD[1]), WELS_MAX (iSubSD[2], iSubSD[3])) -
WELS_MIN (WELS_MIN (iSubSD[0], iSubSD[1]), WELS_MIN (iSubSD[2], iSubSD[3]));
}
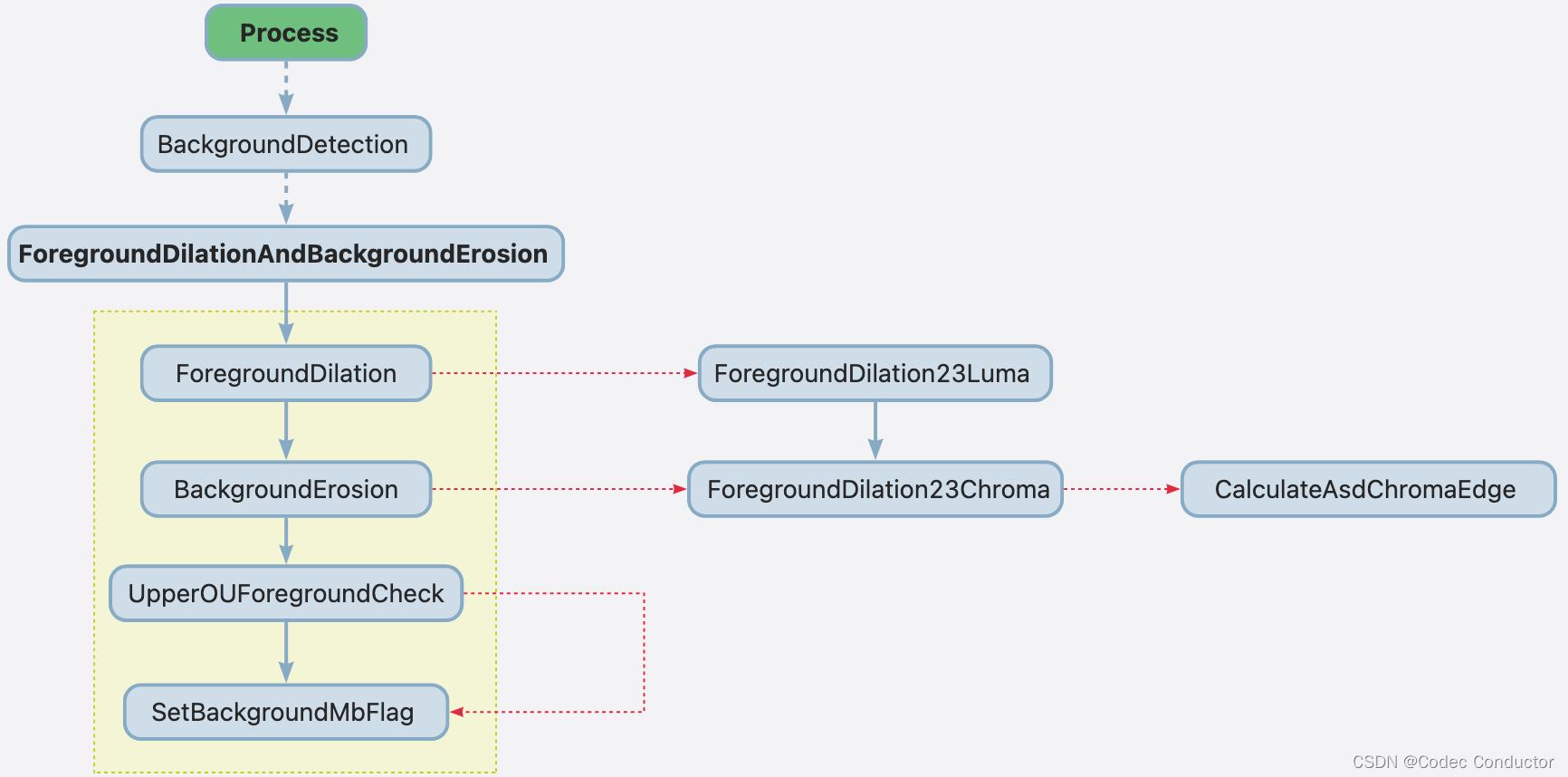
ForegroundDilationAndBackgroundErosion 函数
- 功能:前景膨胀和背景腐蚀
- 函数关系图 :
- 过程:
- 定义iPicStrideUV变量存储 图像UV 分量步长;
- 计算宏块级OU 的宽iPicWidthInOU和高iPicHeightInOU;
- 计算宏块级OU 的 UV 步长iOUStrideUV;
- 计算每行宏块个数iPicWidthInMb;
- 定义了一个指向SBackgroundOU结构体的指针pBackgroundOU,用来访问背景检测单元数组;
- 定义了一个指向int8_t的指针pVaaBackgroundMbFlag,用来访问背景宏块标志数组;
- 定义了一个长度为4的指针数组pOUNeighbours,用来存储当前OU的四个邻居OU的指针;
- 将pOUNeighbours2(即顶部OU)初始化为pBackgroundOU;
- 外层 for 循环 遍历每一列宏块级OU;
- 初始化pRowSkipFlag指针,指向当前行的宏块标志;
- 初始化 pOUNeighbours0 (左OU) 为pBackgroundOU;
- 计算pOUNeighbours3(底OU);
- 内存 for 循环遍历每一行宏块级OU;
- 计算pOUNeighbours1(即右OU);
- 如果当前 OU pBackgroundOU的iBackgroundFlag为真;
- 调用ForegroundDilation函数进行前景膨胀;
- 否则;
- 调用BackgroundErosion函数进行背景腐蚀;
- 调用UpperOUForegroundCheck函数检测上方 OU是否为前景;
- 调用SetBackgroundMbFlag函数设置背景宏块标志;
- 更新pRowSkipFlag,pOUNeighbours、pBackgroundOU为下一个 宏块级OU 做准备;
- 更新pOUNeighbours2和pVaaBackgroundMbFlag指针,为下一行OU的处理做准备。
- 原理图 :

- 相关源码:
ForegroundDilationAndBackgroundErosion函数
void CBackgroundDetection::ForegroundDilationAndBackgroundErosion (vBGDParam* pBgdParam) {
int32_t iPicStrideUV = pBgdParam->iStride[1];
int32_t iPicWidthInOU = pBgdParam->iBgdWidth >> LOG2_BGD_OU_SIZE;
int32_t iPicHeightInOU = pBgdParam->iBgdHeight >> LOG2_BGD_OU_SIZE;
int32_t iOUStrideUV = iPicStrideUV << (LOG2_BGD_OU_SIZE - 1);
int32_t iPicWidthInMb = (15 + pBgdParam->iBgdWidth) >> 4;
SBackgroundOU* pBackgroundOU = pBgdParam->pOU_array;
int8_t* pVaaBackgroundMbFlag = (int8_t*)pBgdParam->pBackgroundMbFlag;
SBackgroundOU* pOUNeighbours[4];//0: left; 1: right; 2: top; 3: bottom
pOUNeighbours[2] = pBackgroundOU;//top OU
for (int32_t j = 0; j < iPicHeightInOU; j ++) {
int8_t* pRowSkipFlag = pVaaBackgroundMbFlag;
pOUNeighbours[0] = pBackgroundOU;//left OU
pOUNeighbours[3] = pBackgroundOU + (iPicWidthInOU & ((j == iPicHeightInOU - 1) - 1)); //bottom OU
for (int32_t i = 0; i < iPicWidthInOU; i++) {
pOUNeighbours[1] = pBackgroundOU + (i < iPicWidthInOU - 1); //right OU
if (pBackgroundOU->iBackgroundFlag)
ForegroundDilation (pBackgroundOU, pOUNeighbours, pBgdParam, j * iOUStrideUV + (i << LOG2_BGD_OU_SIZE_UV));
else
BackgroundErosion (pBackgroundOU, pOUNeighbours);
// check the up OU
if (j > 1 && i > 0 && i < iPicWidthInOU - 1 && pOUNeighbours[2]->iBackgroundFlag == 1) {
UpperOUForegroundCheck (pOUNeighbours[2], pRowSkipFlag - OU_SIZE_IN_MB * iPicWidthInMb, iPicWidthInOU, iPicWidthInMb);
}
SetBackgroundMbFlag (pRowSkipFlag, iPicWidthInMb, pBackgroundOU->iBackgroundFlag);
// preparation for the next OU
pRowSkipFlag += OU_SIZE_IN_MB;
pOUNeighbours[0] = pBackgroundOU;
pOUNeighbours[2]++;
pOUNeighbours[3]++;
pBackgroundOU++;
}
pOUNeighbours[2] = pBackgroundOU - iPicWidthInOU;
pVaaBackgroundMbFlag += OU_SIZE_IN_MB * iPicWidthInMb;
}
}
inline void CBackgroundDetection::ForegroundDilation (SBackgroundOU* pBackgroundOU, SBackgroundOU* pOUNeighbours[],
vBGDParam* pBgdParam, int32_t iChromaSampleStartPos) {
int32_t iPicStrideUV = pBgdParam->iStride[1];
int32_t iSumNeighBackgroundFlags = pOUNeighbours[0]->iBackgroundFlag + pOUNeighbours[1]->iBackgroundFlag +
pOUNeighbours[2]->iBackgroundFlag + pOUNeighbours[3]->iBackgroundFlag;
if (pBackgroundOU->iSAD > BGD_OU_SIZE * Q_FACTOR) {
switch (iSumNeighBackgroundFlags) {
case 0:
case 1:
pBackgroundOU->iBackgroundFlag = 0;
break;
case 2:
case 3:
pBackgroundOU->iBackgroundFlag = !ForegroundDilation23Luma (pBackgroundOU, pOUNeighbours);
// chroma component check
if (pBackgroundOU->iBackgroundFlag == 1) {
int8_t iNeighbourForegroundFlags = (!pOUNeighbours[0]->iBackgroundFlag) | ((!pOUNeighbours[1]->iBackgroundFlag) << 1)
| ((!pOUNeighbours[2]->iBackgroundFlag) << 2) | ((!pOUNeighbours[3]->iBackgroundFlag) << 3);
pBackgroundOU->iBackgroundFlag = !ForegroundDilation23Chroma (iNeighbourForegroundFlags, iChromaSampleStartPos,
iPicStrideUV, pBgdParam);
}
break;
default:
break;
}
}
}
inline void CBackgroundDetection::BackgroundErosion (SBackgroundOU* pBackgroundOU, SBackgroundOU* pOUNeighbours[]) {
if (pBackgroundOU->iMaxDiffSubSd <= (BGD_OU_SIZE * Q_FACTOR)) { //BGD_OU_SIZE*BGD_OU_SIZE>>2
int32_t iSumNeighBackgroundFlags = pOUNeighbours[0]->iBackgroundFlag + pOUNeighbours[1]->iBackgroundFlag +
pOUNeighbours[2]->iBackgroundFlag + pOUNeighbours[3]->iBackgroundFlag;
int32_t sumNbrBGsad = (pOUNeighbours[0]->iSAD & (-pOUNeighbours[0]->iBackgroundFlag)) + (pOUNeighbours[2]->iSAD &
(-pOUNeighbours[2]->iBackgroundFlag))
+ (pOUNeighbours[1]->iSAD & (-pOUNeighbours[1]->iBackgroundFlag)) + (pOUNeighbours[3]->iSAD &
(-pOUNeighbours[3]->iBackgroundFlag));
if (pBackgroundOU->iSAD * iSumNeighBackgroundFlags <= (3 * sumNbrBGsad) >> 1) {
if (iSumNeighBackgroundFlags == 4) {
pBackgroundOU->iBackgroundFlag = 1;
} else {
if ((pOUNeighbours[0]->iBackgroundFlag & pOUNeighbours[1]->iBackgroundFlag)
|| (pOUNeighbours[2]->iBackgroundFlag & pOUNeighbours[3]->iBackgroundFlag)) {
pBackgroundOU->iBackgroundFlag = !ForegroundDilation23Luma (pBackgroundOU, pOUNeighbours);
}
}
}
}
}
inline void CBackgroundDetection::UpperOUForegroundCheck (SBackgroundOU* pCurOU, int8_t* pBackgroundMbFlag,
int32_t iPicWidthInOU, int32_t iPicWidthInMb) {
if (pCurOU->iSAD > BGD_OU_SIZE * Q_FACTOR) {
SBackgroundOU* pOU_L = pCurOU - 1;
SBackgroundOU* pOU_R = pCurOU + 1;
SBackgroundOU* pOU_U = pCurOU - iPicWidthInOU;
SBackgroundOU* pOU_D = pCurOU + iPicWidthInOU;
if (pOU_L->iBackgroundFlag + pOU_R->iBackgroundFlag + pOU_U->iBackgroundFlag + pOU_D->iBackgroundFlag <= 1) {
SetBackgroundMbFlag (pBackgroundMbFlag, iPicWidthInMb, 0);
pCurOU->iBackgroundFlag = 0;
}
}
}
ForegroundDilation23Luma函数
inline bool CBackgroundDetection::ForegroundDilation23Luma (SBackgroundOU* pBackgroundOU,
SBackgroundOU* pOUNeighbours[]) {
SBackgroundOU* pOU_L = pOUNeighbours[0];
SBackgroundOU* pOU_R = pOUNeighbours[1];
SBackgroundOU* pOU_U = pOUNeighbours[2];
SBackgroundOU* pOU_D = pOUNeighbours[3];
if (pBackgroundOU->iMAD > pBackgroundOU->iMinSubMad << 1) {
int32_t iMaxNbrForegroundMad;
int32_t iMaxNbrBackgroundMad;
int32_t aBackgroundMad[4];
int32_t aForegroundMad[4];
aForegroundMad[0] = (pOU_L->iBackgroundFlag - 1) & pOU_L->iMAD;
aForegroundMad[1] = (pOU_R->iBackgroundFlag - 1) & pOU_R->iMAD;
aForegroundMad[2] = (pOU_U->iBackgroundFlag - 1) & pOU_U->iMAD;
aForegroundMad[3] = (pOU_D->iBackgroundFlag - 1) & pOU_D->iMAD;
iMaxNbrForegroundMad = WELS_MAX (WELS_MAX (aForegroundMad[0], aForegroundMad[1]), WELS_MAX (aForegroundMad[2],
aForegroundMad[3]));
aBackgroundMad[0] = ((!pOU_L->iBackgroundFlag) - 1) & pOU_L->iMAD;
aBackgroundMad[1] = ((!pOU_R->iBackgroundFlag) - 1) & pOU_R->iMAD;
aBackgroundMad[2] = ((!pOU_U->iBackgroundFlag) - 1) & pOU_U->iMAD;
aBackgroundMad[3] = ((!pOU_D->iBackgroundFlag) - 1) & pOU_D->iMAD;
iMaxNbrBackgroundMad = WELS_MAX (WELS_MAX (aBackgroundMad[0], aBackgroundMad[1]), WELS_MAX (aBackgroundMad[2],
aBackgroundMad[3]));
return ((iMaxNbrForegroundMad > pBackgroundOU->iMinSubMad << 2) || (pBackgroundOU->iMAD > iMaxNbrBackgroundMad << 1
&& pBackgroundOU->iMAD <= (iMaxNbrForegroundMad * 3) >> 1));
}
return 0;
}
ForegroundDilation23Chroma函数
inline bool CBackgroundDetection::ForegroundDilation23Chroma (int8_t iNeighbourForegroundFlags,
int32_t iStartSamplePos, int32_t iPicStrideUV, vBGDParam* pBgdParam) {
static const int8_t kaOUPos[4] = {OU_LEFT, OU_RIGHT, OU_TOP, OU_BOTTOM};
int32_t aEdgeOffset[4] = {0, BGD_OU_SIZE_UV - 1, 0, iPicStrideUV* (BGD_OU_SIZE_UV - 1)};
int32_t iStride[4] = {iPicStrideUV, iPicStrideUV, 1, 1};
// V component first, high probability because V stands for red color and human skin colors have more weight on this component
for (int32_t i = 0; i < 4; i++) {
if (iNeighbourForegroundFlags & kaOUPos[i]) {
uint8_t* pRefC = pBgdParam->pRef[2] + iStartSamplePos + aEdgeOffset[i];
uint8_t* pCurC = pBgdParam->pCur[2] + iStartSamplePos + aEdgeOffset[i];
if (CalculateAsdChromaEdge (pRefC, pCurC, iStride[i]) > BGD_THD_ASD_UV) {
return 1;
}
}
}
// U component, which stands for blue color, low probability
for (int32_t i = 0; i < 4; i++) {
if (iNeighbourForegroundFlags & kaOUPos[i]) {
uint8_t* pRefC = pBgdParam->pRef[1] + iStartSamplePos + aEdgeOffset[i];
uint8_t* pCurC = pBgdParam->pCur[1] + iStartSamplePos + aEdgeOffset[i];
if (CalculateAsdChromaEdge (pRefC, pCurC, iStride[i]) > BGD_THD_ASD_UV) {
return 1;
}
}
}
return 0;
}
inline int32_t CBackgroundDetection::CalculateAsdChromaEdge (uint8_t* pOriRef, uint8_t* pOriCur, int32_t iStride) {
int32_t ASD = 0;
int32_t idx;
for (idx = 0; idx < BGD_OU_SIZE_UV; idx++) {
ASD += *pOriCur - *pOriRef;
pOriRef += iStride;
pOriCur += iStride;
}
return WELS_ABS (ASD);
}