1、串口屏界面设计
1.新建工程

保存位置自定义,作为一个合格的嵌入式工程师要有路径下没有中文的情况并命名。

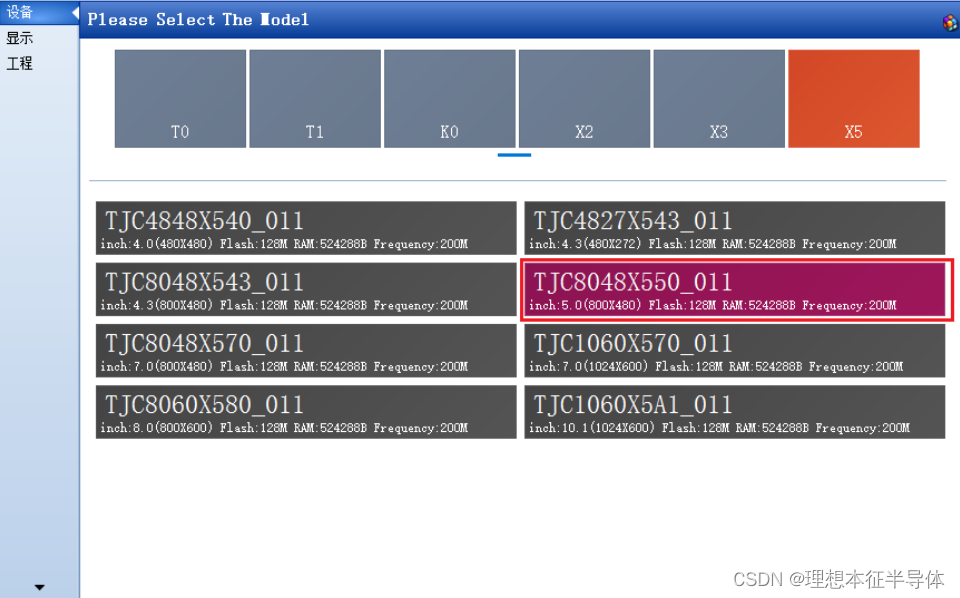
选择自己串口屏对应的芯片,一般屏幕背面会有,也可以查看资料。
选择显示方向,自行选择。按照自己的爱好

右边可对当前页面重命名。

再进行一些基础代码修改。一般情况下修改波特率与单片机串口一致即可。

Program.s
//以下代码只在上电时运行一次,一般用于全局变量定义和上电初始化数据
int sys0=0,sys1=0,sys2=0 //全局变量定义目前仅支持4字节有符号整形(int),不支持其他类型的全局变量声明,如需使用字符串类型可以在页面中使用变量控件
bauds=115200 //配置波特率为115200
dim=100 //配置亮度100
bkcmd=0
printh 00 00 00 ff ff ff 88 ff ff ff//输出上电信息到串口
page 0 //上电刷新第0页然后从工具箱添加组件

右下角可进行属性设置。

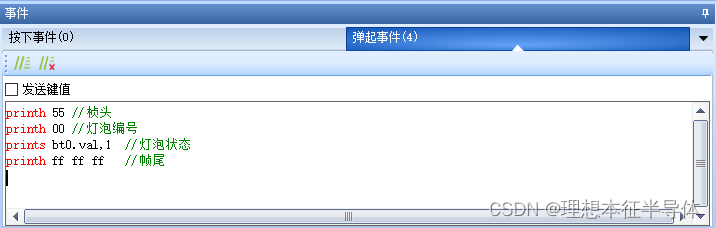
然后在按钮组件添加弹起事件,0 1 2 3类似,依次添加。
串口屏界面设计完毕,下载到串口屏。

接下来进行单片机程序编写,本实验使用串口1与串口屏通讯。
程序与串口驱动无异
tjc_usart_hmi.h
#ifndef __TJCUSARTHMI_H_
#define __TJCUSARTHMI_H_
#include "stm32f10x.h"
/**
打印到屏幕串口
*/
void TJCPrintf (const char *str, ...);
void initRingBuff(void);
void writeRingBuff(uint8_t data);
void deleteRingBuff(uint16_t size);
uint16_t getRingBuffLenght(void);
uint8_t read1BFromRingBuff(uint16_t position);
void USART1_Init(uint32_t bound);
void USART1_printf(char* fmt,...); //串口1的专用printf函数
#define RINGBUFF_LEN (500) //定义最大接收字节数 500
#define usize getRingBuffLenght()
#define code_c() initRingBuff()
#define udelete(x) deleteRingBuff(x)
#define u(x) read1BFromRingBuff(x)
extern uint8_t RxBuff[1];
#endiftjc_usart_hmi.c
#include <stdint.h>
#include <stdio.h>
#include <string.h>
#include <stdarg.h>
#include "tjc_usart_hmi.h"
#include <stddef.h>
#include <stm32f10x_usart.h>
#define STR_LENGTH 100
typedef struct
{
uint16_t Head;
uint16_t Tail;
uint16_t Lenght;
uint8_t Ring_data[RINGBUFF_LEN];
}RingBuff_t;
RingBuff_t ringBuff; //创建一个ringBuff的缓冲区
uint8_t RxBuff[1];
void TJCPrintf (const char *str, ...){
char buffer[STR_LENGTH+1]; // 数据长度
u8 i = 0;
va_list arg_ptr;
va_start(arg_ptr, str);
vsnprintf(buffer, STR_LENGTH+1, str, arg_ptr);
va_end(arg_ptr);
while ((i < STR_LENGTH) && (i < strlen(buffer)))
{
USART_SendData(USART1, (u8) buffer[i++]);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
USART_SendData(USART1,(uint8_t)0xff); //这个函数改为你的单片机的串口发送单字节函数
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1,(uint8_t)0xff); //这个函数改为你的单片机的串口发送单字节函数
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1,(uint8_t)0xff); //这个函数改为你的单片机的串口发送单字节函数
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
/********************************************************
函数名: USART1_IRQHandler
作者:
日期: 2022.10.08
功能: 串口接收中断,将接收到的数据写入环形缓冲区
输入参数:
返回值: void
修改记录:
**********************************************************/
void USART1_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
RxBuff[0] = USART_ReceiveData(USART1);
writeRingBuff(RxBuff[0]);
}
}
/********************************************************
函数名: initRingBuff
作者:
日期: 2022.10.08
功能: 初始化环形缓冲区
输入参数:
返回值: void
修改记录:
**********************************************************/
void initRingBuff(void)
{
//初始化相关信息
ringBuff.Head = 0;
ringBuff.Tail = 0;
ringBuff.Lenght = 0;
}
/********************************************************
函数名: writeRingBuff
作者:
日期: 2022.10.08
功能: 往环形缓冲区写入数据
输入参数:
返回值: void
修改记录:
**********************************************************/
void writeRingBuff(uint8_t data)
{
if(ringBuff.Lenght >= RINGBUFF_LEN) //判断缓冲区是否已满
{
return ;
}
ringBuff.Ring_data[ringBuff.Tail]=data;
ringBuff.Tail = (ringBuff.Tail+1)%RINGBUFF_LEN;//防止越界非法访问
ringBuff.Lenght++;
}
/********************************************************
函数名: deleteRingBuff
作者:
日期: 2022.10.08
功能: 删除串口缓冲区中相应长度的数据
输入参数: 要删除的长度
返回值: void
修改记录:
**********************************************************/
void deleteRingBuff(uint16_t size)
{
if(size >= ringBuff.Lenght)
{
initRingBuff();
return;
}
for(int i = 0; i < size; i++)
{
if(ringBuff.Lenght == 0)//判断非空
{
initRingBuff();
return;
}
ringBuff.Head = (ringBuff.Head+1)%RINGBUFF_LEN;//防止越界非法访问
ringBuff.Lenght--;
}
}
/********************************************************
函数名: read1BFromRingBuff
作者:
日期: 2022.10.08
功能: 从串口缓冲区读取1字节数据
输入参数: position:读取的位置
返回值: 所在位置的数据(1字节)
修改记录:
**********************************************************/
uint8_t read1BFromRingBuff(uint16_t position)
{
uint16_t realPosition = (ringBuff.Head + position) % RINGBUFF_LEN;
return ringBuff.Ring_data[realPosition];
}
/********************************************************
函数名: getRingBuffLenght
作者:
日期: 2022.10.08
功能: 获取串口缓冲区的数据数量
输入参数:
返回值: 串口缓冲区的数据数量
修改记录:
**********************************************************/
uint16_t getRingBuffLenght()
{
return ringBuff.Lenght;
}
/********************************************************
函数名: isRingBuffOverflow
作者:
日期: 2022.10.08
功能: 判断环形缓冲区是否已满
输入参数:
返回值: 1:环形缓冲区已满 , 2:环形缓冲区未满
修改记录:
**********************************************************/
uint8_t isRingBuffOverflow()
{
return ringBuff.Lenght == RINGBUFF_LEN;
}
//初始化IO 串口1
//bound:波特率
void USART1_Init(uint32_t bound){
//串口1初始化并启动
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启ENABLE/关闭DISABLE中断
USART_Cmd(USART1, ENABLE); //使能串口
}main.c
#include "stm32f10x.h"
#include "tjc_usart_hmi.h"
#include "stm32f10x_rcc.h"
#define FRAMELENGTH 6
void NVIC_Configuration(void);
void RCC_Configuration(void);
int main(void)
{
RCC_Configuration();
NVIC_Configuration();
USART1_Init(115200); //串口初始化为115200
TJCPrintf("\x00"); //为确保串口HMI正常通信
while(1)
{
//stm32f103的GND接串口屏或串口工具的GND,共地
//stm32f103的TX1(PA9)接串口屏或串口工具的RX
//stm32f103的RX1(PA10)接串口屏或串口工具的TX
//stm32f103的5V接串口屏的5V,如果是串口工具,不用接5V也可以
//串口数据格式:
//串口数据帧长度:6字节
//帧头 led编号 LED状态 帧尾
//0x55 1字节 1字节 0xffffff
//例子1:上位机代码 printh 55 01 00 ff ff ff 含义:1号led关闭
//例子2:上位机代码 printh 55 04 01 ff ff ff 含义:4号led打开
//例子3:上位机代码 printh 55 00 01 ff ff ff 含义:0号led打开
//例子4:上位机代码 printh 55 04 00 ff ff ff 含义:4号led关闭
while(usize >= FRAMELENGTH)
{
//校验帧头帧尾是否匹配
if(u(0) != 0x55 || u(3) != 0xff || u(4) != 0xff || u(5) != 0xff)
{
//不匹配删除1字节
udelete(1);
}else
{
//匹配,跳出循环
break;
}
}
//进行解析
if(usize >= FRAMELENGTH && u(0) == 0x55 && u(3) == 0xff && u(4) == 0xff && u(5) == 0xff)
{
TJCPrintf("msg.txt=\"led %d is %s\"", u(1), u(2) ? "on" : "off");
udelete(FRAMELENGTH);
}
//delay_ms(1000);
}
}
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 嵌套向量中断控制器组选择 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* 配置USART为中断源 */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
/* 抢断优先级*/
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
/* 子优先级 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
/* 使能中断 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
/* 初始化配置NVIC */
NVIC_Init(&NVIC_InitStructure);
}
void RCC_Configuration(void){ //RCC时钟的设置
ErrorStatus HSEStartUpStatus;
RCC_DeInit(); /* RCC system reset(for debug purpose) RCC寄存器恢复初始化值*/
RCC_HSEConfig(RCC_HSE_ON); /* Enable HSE 使能外部高速晶振*/
HSEStartUpStatus = RCC_WaitForHSEStartUp(); /* Wait till HSE is ready 等待外部高速晶振使能完成*/
if(HSEStartUpStatus == SUCCESS){
/*设置PLL时钟源及倍频系数*/
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9); //RCC_PLLMul_x(枚举2~16)是倍频值。当HSE=8MHZ,RCC_PLLMul_9时PLLCLK=72MHZ
/*设置AHB时钟(HCLK)*/
RCC_HCLKConfig(RCC_SYSCLK_Div1); //RCC_SYSCLK_Div1------AHB时钟 = 系统时钟(SYSCLK) = 72MHZ(外部晶振8HMZ)
/*注意此处的设置,如果使用SYSTICK做延时程序,此时SYSTICK(Cortex System timer)=HCLK/8=9MHZ*/
RCC_PCLK1Config(RCC_HCLK_Div2); //设置低速AHB时钟(PCLK1),RCC_HCLK_Div2------APB1时钟 = HCLK/2 = 36MHZ(外部晶振8HMZ)
RCC_PCLK2Config(RCC_HCLK_Div1); //设置高速AHB时钟(PCLK2),RCC_HCLK_Div1------APB2时钟 = HCLK = 72MHZ(外部晶振8HMZ)
/*注:AHB主要负责外部存储器时钟。APB2负责AD,I/O,高级TIM,串口1。APB1负责DA,USB,SPI,I2C,CAN,串口2,3,4,5,普通TIM */
FLASH_SetLatency(FLASH_Latency_2); //设置FLASH存储器延时时钟周期数
/*FLASH时序延迟几个周期,等待总线同步操作。
推荐按照单片机系统运行频率:
0---24MHz时,取Latency_0;
24---48MHz时,取Latency_1;
48~72MHz时,取Latency_2*/
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); //选择FLASH预取指缓存的模式,预取指缓存使能
RCC_PLLCmd(ENABLE); //使能PLL
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET); //等待PLL输出稳定
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); //选择SYSCLK时钟源为PLL
while(RCC_GetSYSCLKSource() != 0x08); //等待PLL成为SYSCLK时钟源
} 代码很好理解,查看注释可知,可根据自己情况添加控制外设以及显示温湿度等函数