数据帧
数据帧:发送设备主动发送数据(广播式)
标准格式的11ID不够用了,由此产生了扩展格式
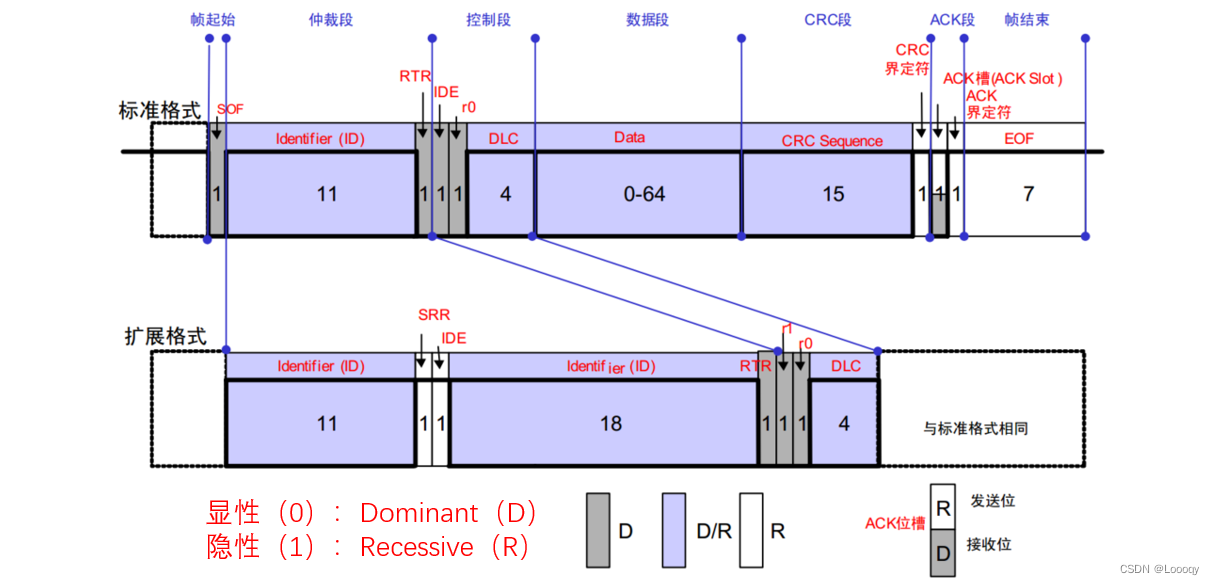
SOF:帧起始,表示后面一段波形为传输的数据位
ID:标识符,区分功能,同时决定优先级
RTR:远程请求位,区分数据帧和遥控帧
IDE:扩展标志位,区分标准格式和扩展格式
SRR:替代RTR,协议升级时留下的无意义位
r0/r1:保留位,为后续协议升级留下空间
DLC:数据长度,指示数据段有几个字节(1-8字节的有效载荷)
CRC:循环冗余校验,校验数据是否正确
ACK:应答位,判断数据有没有被接收方接收
CRC/ACK界定符:为应答位前后发送方和接收方释放总线留下时间
EOF:帧结束,表示数据位已经传输完毕
遥控帧
遥控帧:接收设备主动请求数据(请求式)
遥控帧无数据段,RTR为隐性电平1,其他部分与数据帧相同
CAN总线的数据主要依靠发送方自觉广播出来,一般发送放会定一个周期,定时广播自己的数据,但如果发送方没有及时发送出数据,或者说这个数据使用频率太低了,广播太频繁了大家用不到浪费总线资源,广播你太慢了,偶尔有用的话,又及时拿不到,可以规定发送发不需要主动广播这个数据,而是如果有设备需要的话,首先接收方(需要数据的一方)发出一个遥控帧,遥控帧包含报文ID(遥控帧也是广播出来的,每个设备都能收到遥控帧),如果其中某个设备有这个ID的数据,那这个设备就会通过数据帧广播出来
错误帧
错误帧:某个设备检测出错误时向其他设备通知错误。
总线上所有设备都会监督总线的数据,一旦发现"位错误"或"填充错误"或"CRC错误"或"格式错误"或"应答错误" ,这些设备便会发出错误帧来破坏数据,同时终止当前的发送设备
过载帧
过载帧:接收设备通知其尚未做好接收准备。
当接收方收到大量数据而无法处理时,其可以发出过载帧,延缓发送方的数据发送,以平衡总线负载,避免数据丢失
帧间隔
帧间隔:用于将数据帧及遥控帧与前面的帧分离开
位填充
位填充规则:发送方每发送5个相同电平后,自动追加一个相反电平的填充位,接收方检测到填充位时,会自动移除填充位,恢复原始数据
位填充作用:防止数据波形长时间不变化
增加波形的定时信息,利于接收方执行"再同步",防止波形长时间无变化,导致接收方不能精确掌握数据采样时机
将正常数据流与"错误帧"和"过载帧"区分开,标志"错误帧"和"过载帧"的特异性
保持CAN总线在发送正常数据流时的活跃状态,防止被误认为总线空闲