LeetCode-103. 二叉树的锯齿形层序遍历【树 广度优先搜索 二叉树】
- 题目描述:
- [解题思路一:层序遍历,唯一区别就是`ans.append(level::-1 if len(ans) % 2 else level)`](#解题思路一:层序遍历,唯一区别就是
ans.append(level[::-1] if len(ans) % 2 else level)) - 背诵版:
- 解题思路三:0
题目描述:
给你二叉树的根节点 root ,返回其节点值的 锯齿形层序遍历 。(即先从左往右,再从右往左进行下一层遍历,以此类推,层与层之间交替进行)。
示例 1:
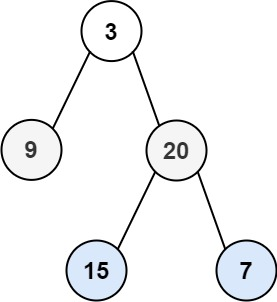
输入:root = 3,9,20,null,null,15,7
输出:\[3,20,9,15,7]
示例 2:
输入:root = 1
输出:\[1]
示例 3:
输入:root = \[\]
输出:\[\]
提示:
树中节点数目在范围 0, 2000 内
-100 <= Node.val <= 100
解题思路一:层序遍历,唯一区别就是ans.append(level[::-1] if len(ans) % 2 else level)
python
# Definition for a binary tree node.
# class TreeNode:
# def __init__(self, val=0, left=None, right=None):
# self.val = val
# self.left = left
# self.right = right
class Solution:
def zigzagLevelOrder(self, root: Optional[TreeNode]) -> List[List[int]]:
if not root:
return []
queue = deque([root])
ans = []
while queue:
level = []
for _ in range(len(queue)):
cur = queue.popleft()
level.append(cur.val)
if cur.left:
queue.append(cur.left)
if cur.right:
queue.append(cur.right)
ans.append(level[::-1] if len(ans) % 2 else level)
return ans时间复杂度:O(n)
空间复杂度:O(n)
背诵版:
python
# Definition for a binary tree node.
# class TreeNode:
# def __init__(self, val=0, left=None, right=None):
# self.val = val
# self.left = left
# self.right = right
class Solution:
def zigzagLevelOrder(self, root: Optional[TreeNode]) -> List[List[int]]:
if not root:
return []
q = deque([root])
ans = []
while q:
level = []
for i in range(len(q)):
cur = q.popleft()
level.append(cur.val)
if cur.left:
q.append(cur.left)
if cur.right:
q.append(cur.right)
# if len(ans) % 2 == 0:
# ans.append(level[:])
# else:
# ans.append(level[::-1])
ans.append(level[::-1] if len(ans) % 2 else level[:])
return ans时间复杂度:O(n)
空间复杂度:O(n)
解题思路三:0
python
时间复杂度:O(n)
空间复杂度:O(n)
创作不易,观众老爷们请留步... 动起可爱的小手,点个赞再走呗 (๑◕ܫ←๑)  欢迎大家关注笔者,你的关注是我持续更博的最大动力
欢迎大家关注笔者,你的关注是我持续更博的最大动力
原创文章,转载告知,盗版必究

♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠