一、七自由度全主动悬架建模
七自由度车辆模型是分析车辆垂向动力学特性的经典模型,它能够全面描述车身运动姿态和车轮动力学行为。该模型包含以下七个自由度:车身质心垂向位移、车身俯仰角、车身侧倾角以及四个车轮的垂向位移。悬架系统由弹簧、阻尼器和直线电机作动器并联组成,轮胎简化为线性弹簧模型。
传统车辆的七自由度模型建立可参考如下文章:七自由度模型搭建与仿真_汽车七自由度振动-CSDN博客
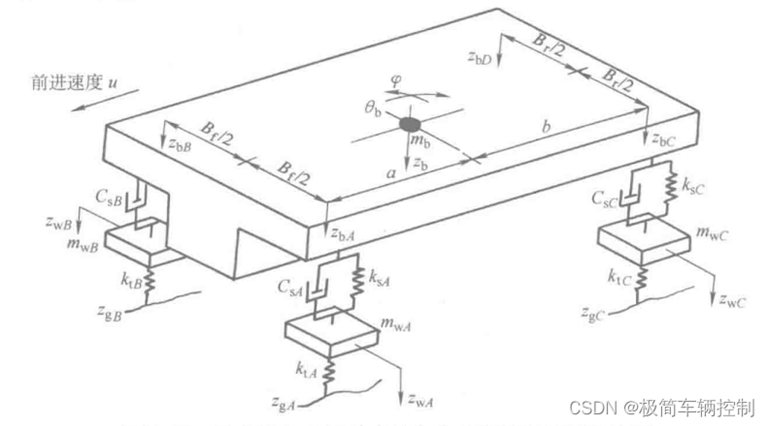
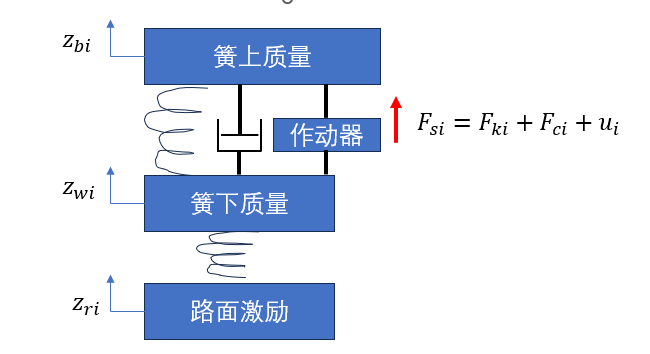
全主动悬架的七自由度模型与传统七自由度悬架模型的最大差异在于每个悬架都多了一个作动器可以提供主动力,该力不受限于悬架运动方向,可主动向上或向下出力。如下图所示:我们可以主动控制每个减振器的Ui,调整车辆姿态。
坐标系定义和符号说明:车辆前进方向为x轴,横向为y轴,垂向为z轴,参数定义如下表:

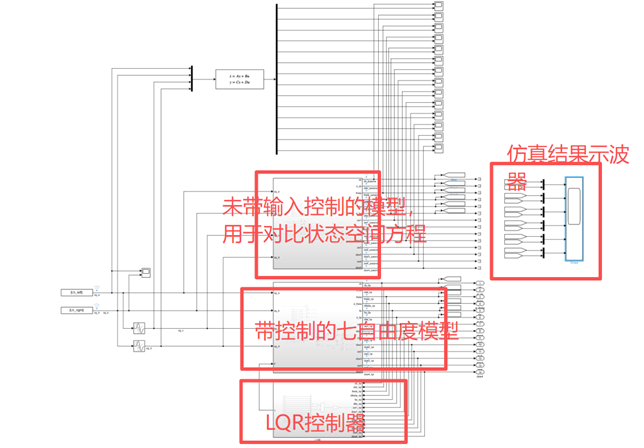
二、七自由度模型simuLink建模
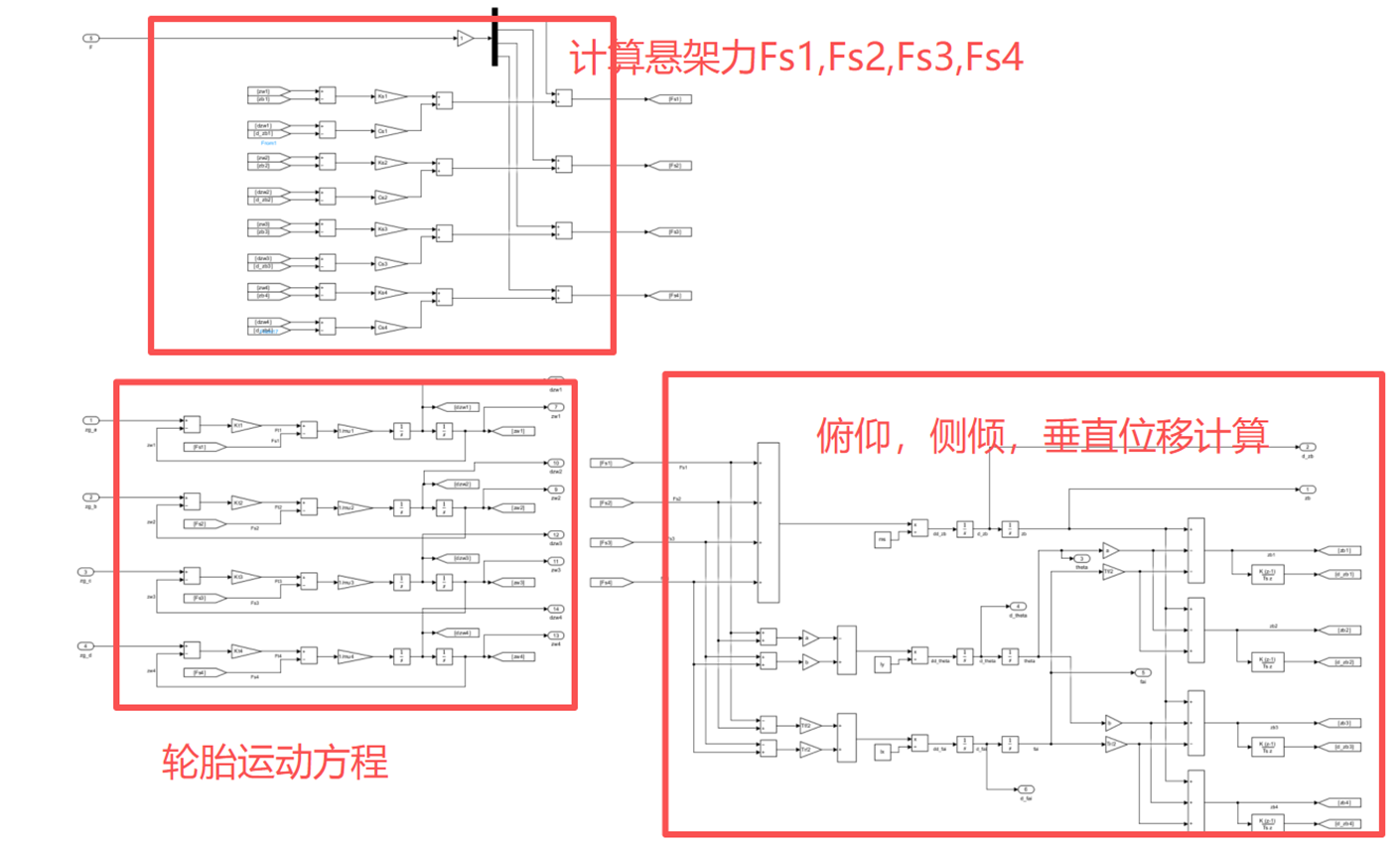
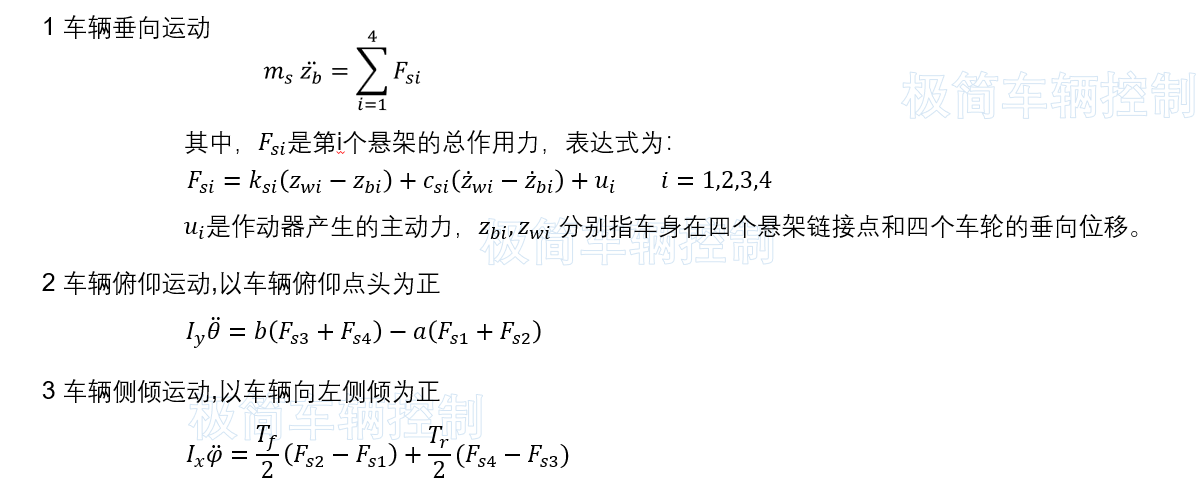
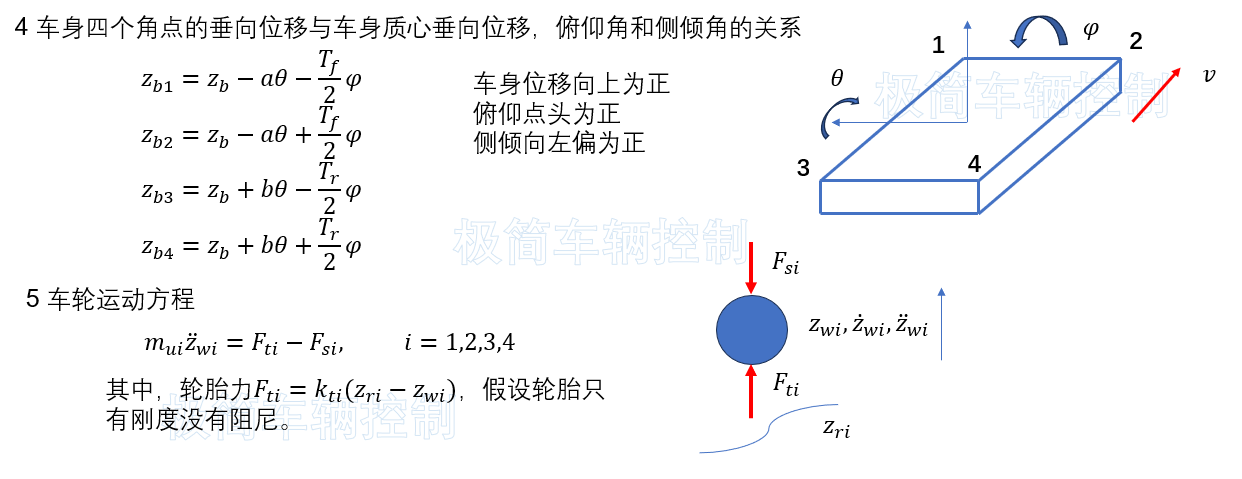
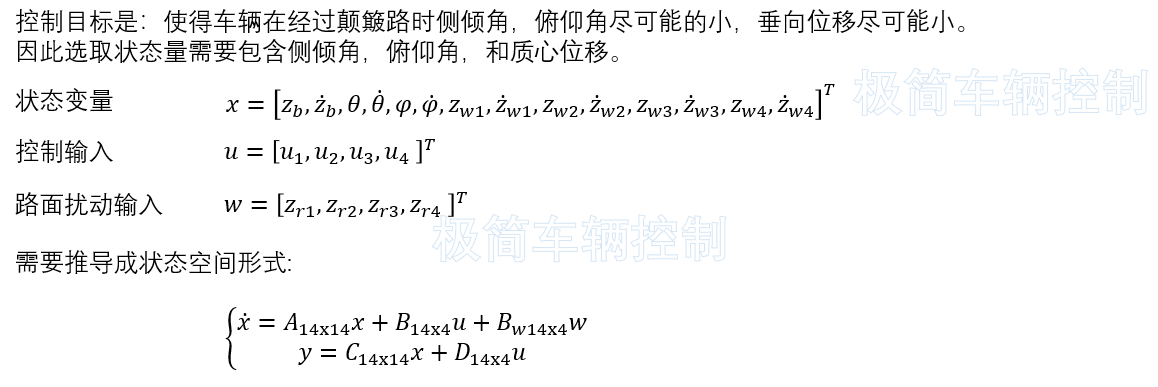
三、状态空间方程推导
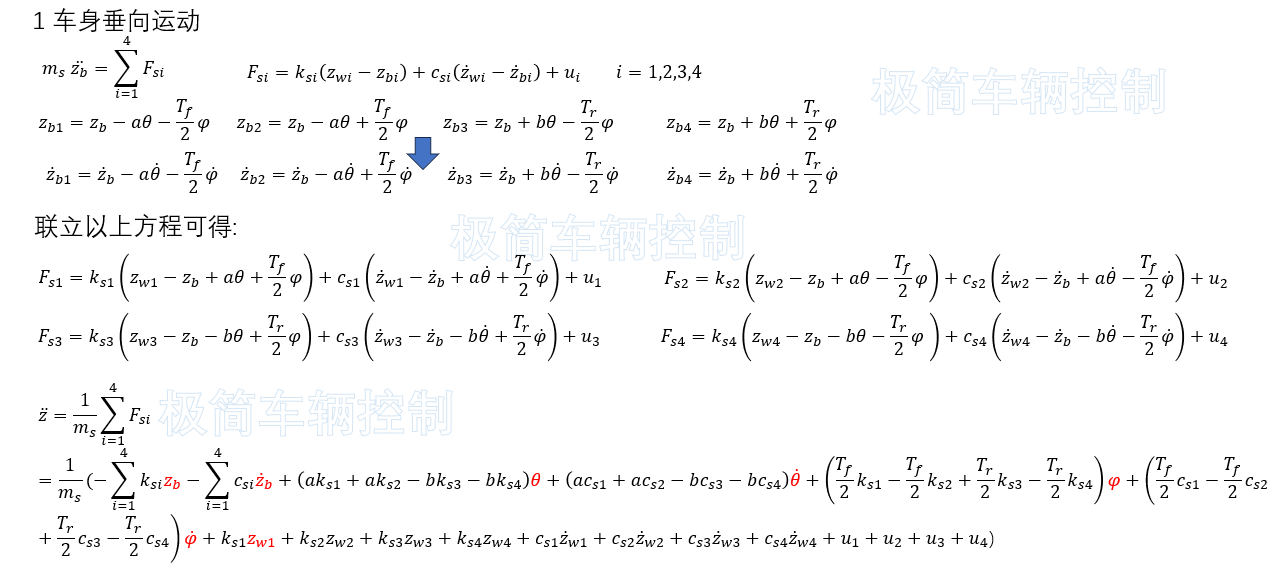
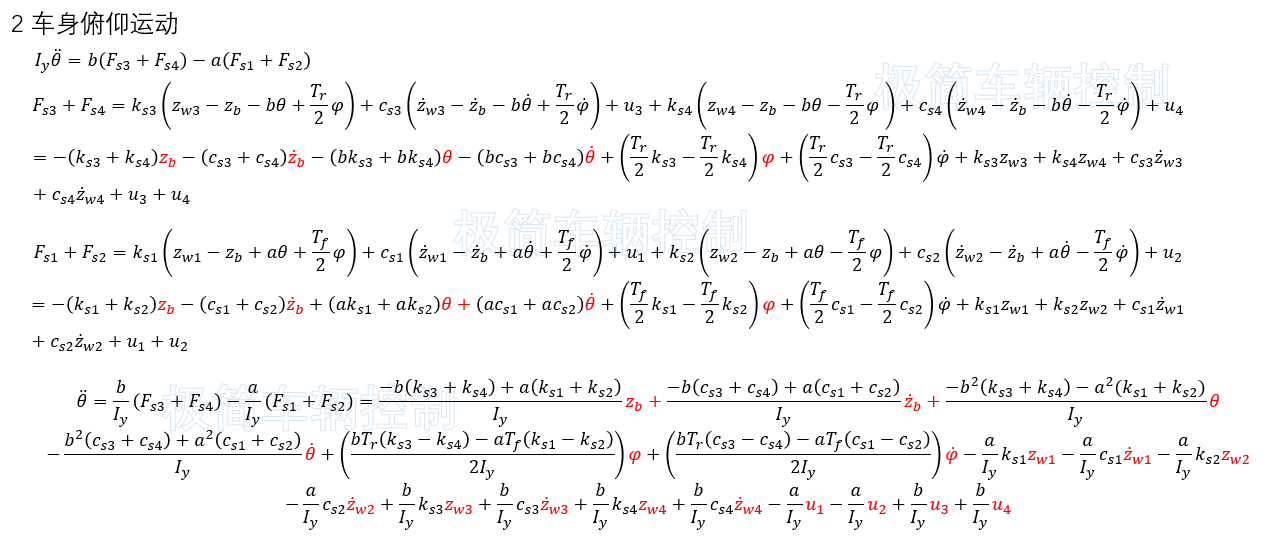
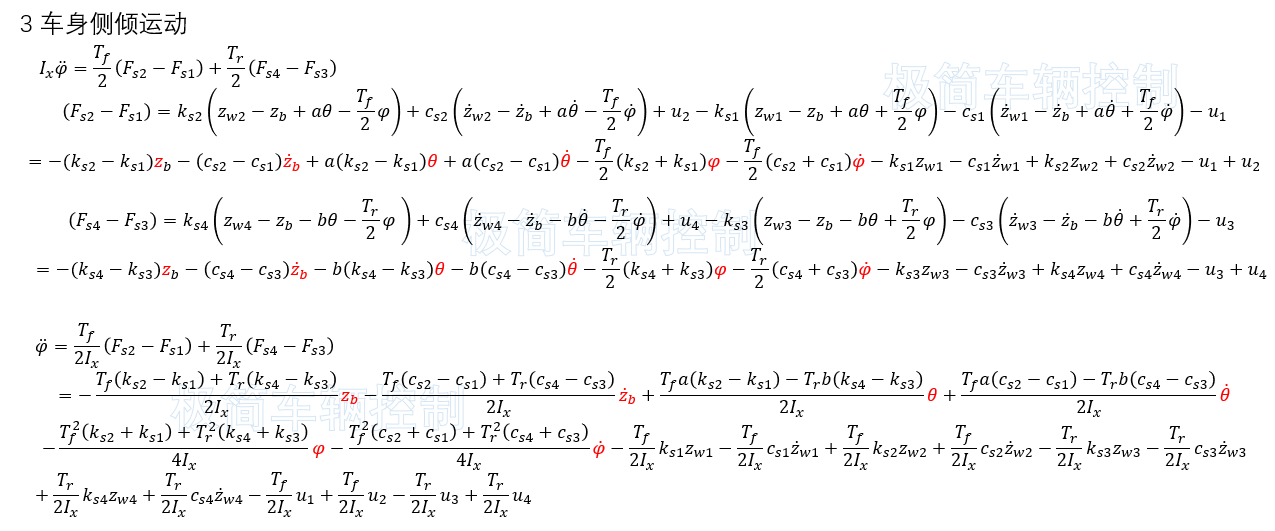
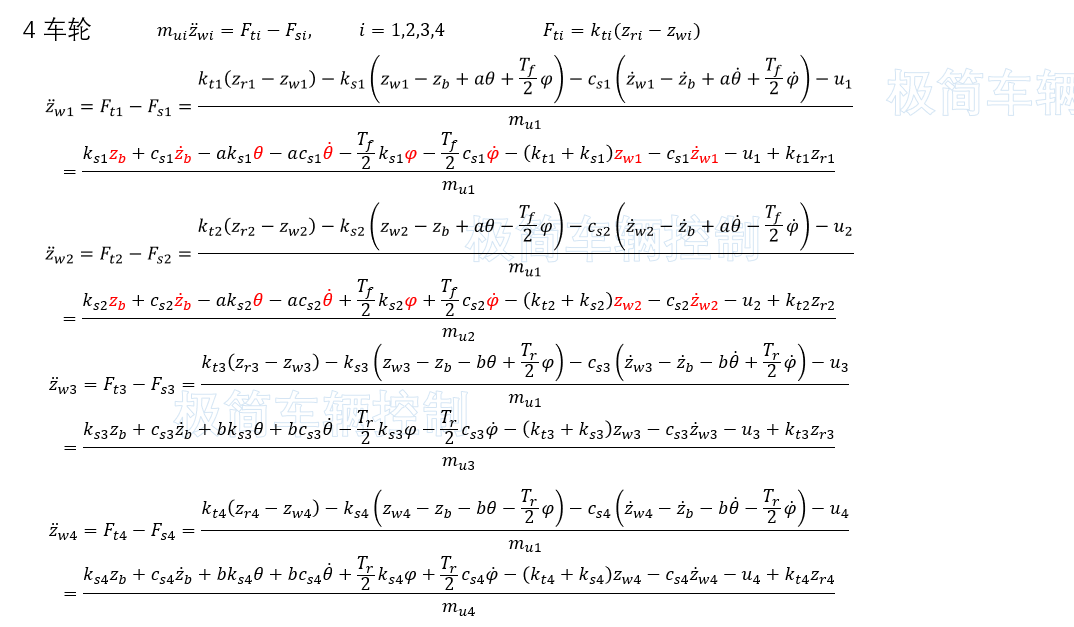
麻了吧?麻了。从以上乱七八糟的公式了再提炼出状态空间方程的A,B矩阵,就成功一大半。这是一页PPT都放不下的矩阵。

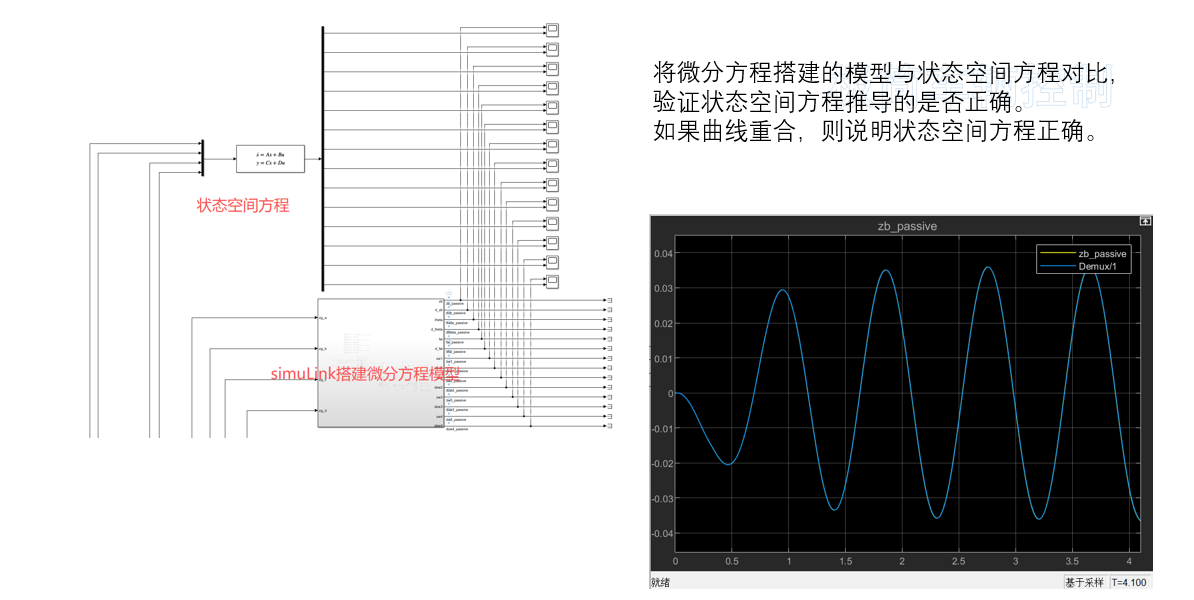
四、模型与状态空间方程校核
因为我们的LQR控制最重要的步骤是推导出状态空间方程,然后去算增益矩阵。所以必须确保空间方程推导的正确性。
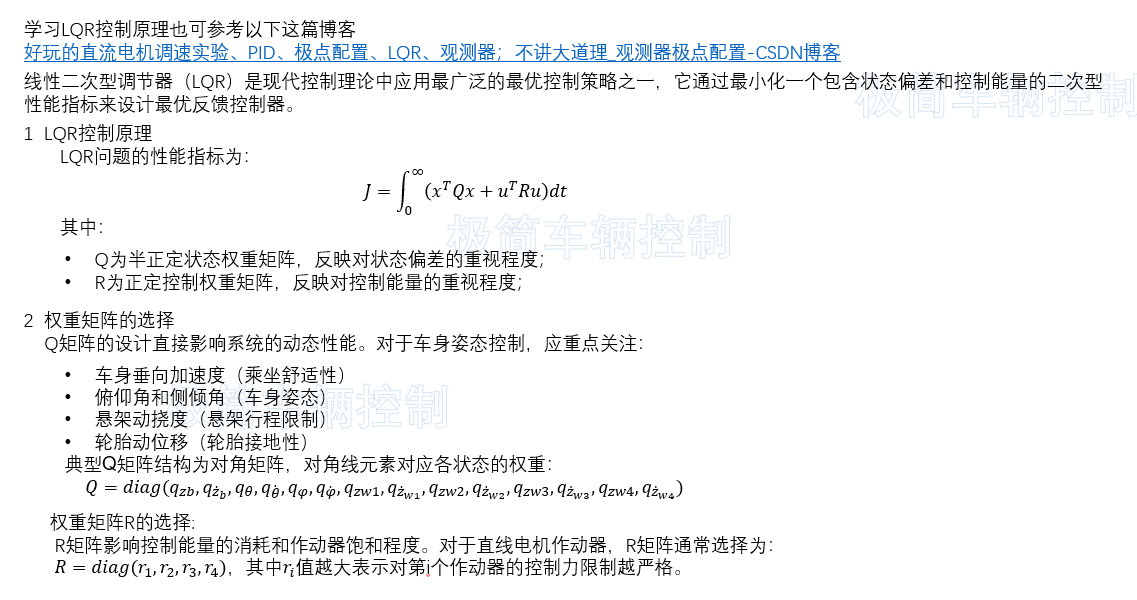
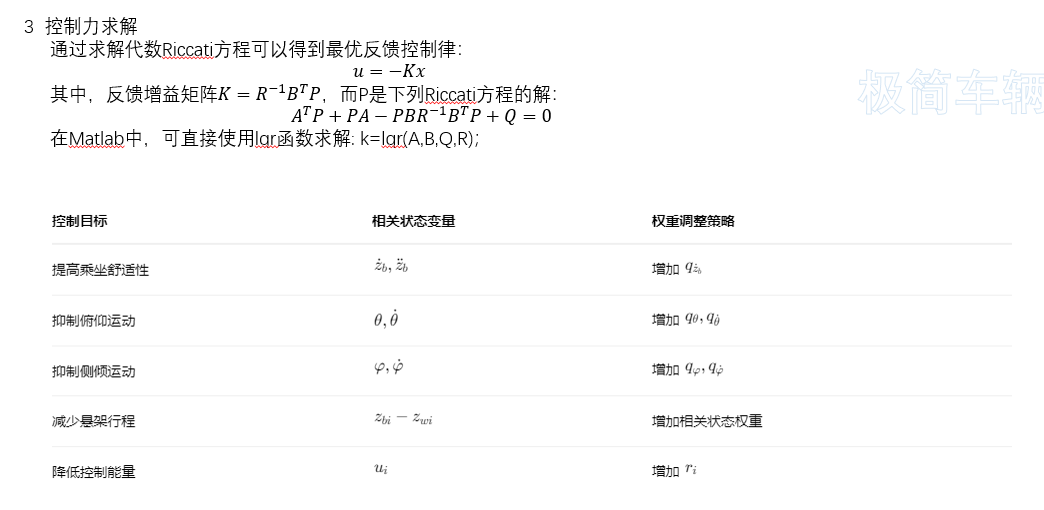
五、LQR控制
六、姿态控制仿真
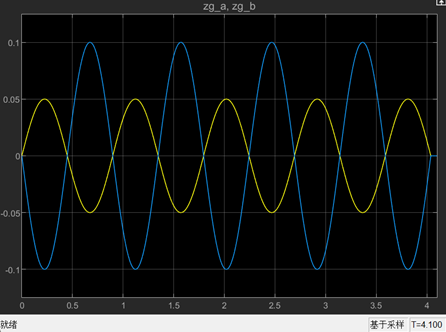
路面,左右高度不一致的交叉路面
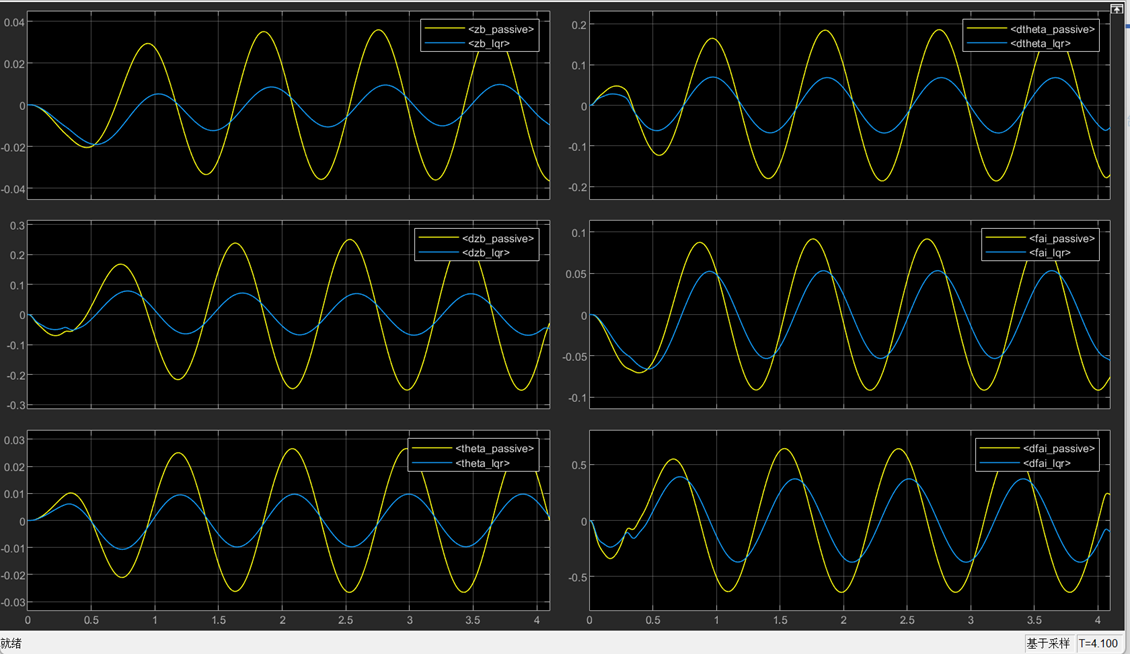
蓝线为带主动控制的结果,比不带控制的,俯仰角,侧倾角,垂向的位移均有很大提升。
七、关于模型和源码
还是在某宝店铺<极简车辆控制>中获取,原创不易,多多支持。