光源
机器视觉中光源的作用
1)强化特征,弱化背景
2)光源打得好,图好了,后期算法更简化
3)图好了,测试速度更高
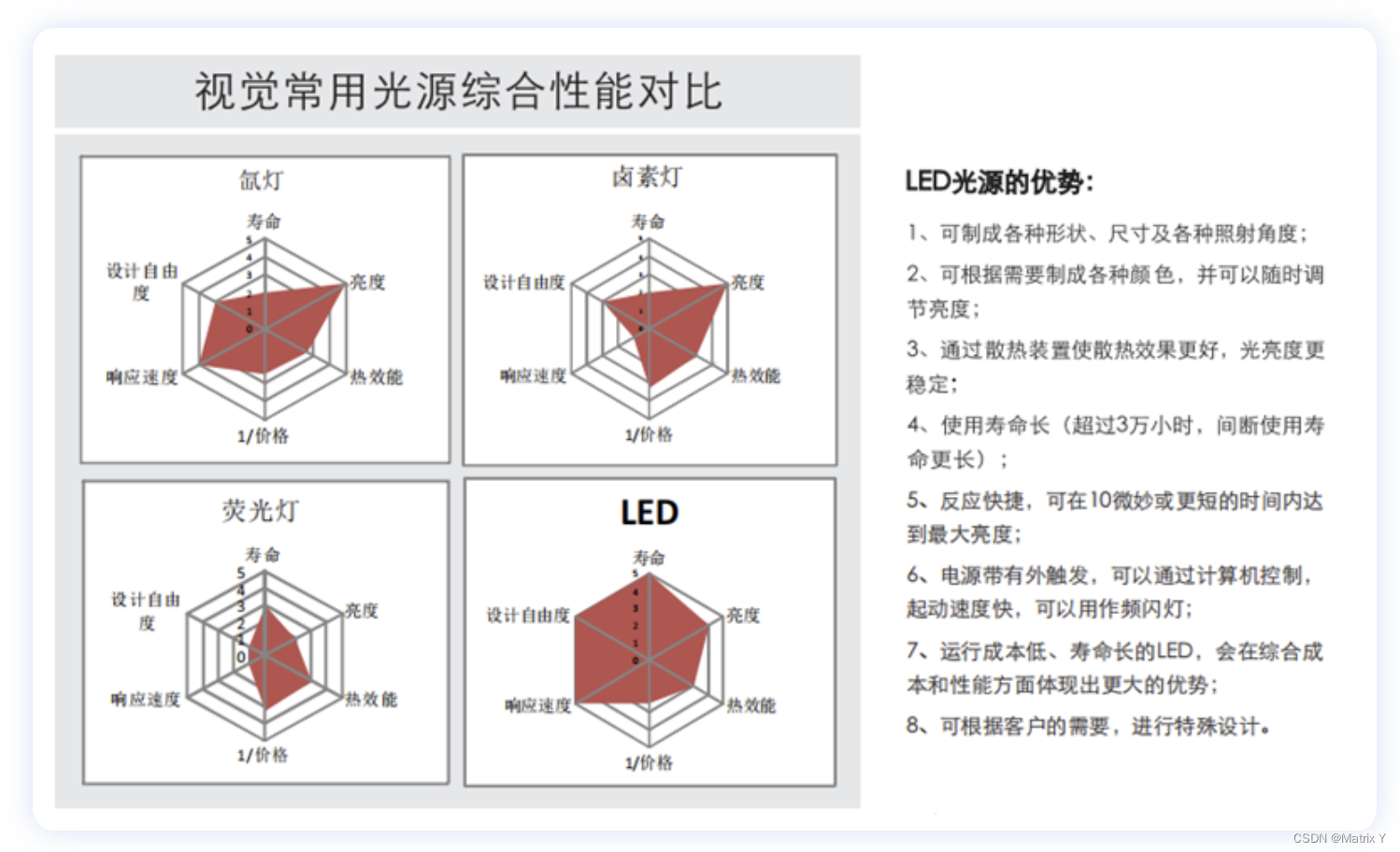
各种光源的综合性能对比及为啥使用LED灯
光的颜色的选择
白色光:通常用于拍摄彩色图像时使用,全局效果较好
蓝光:银色背景下的目标物
红光:可透过一些比较暗的物体,突出检测目标的特征,提高对比度。
绿光:主要针对红色,银色背景。
红外光:可透视塑料的检测
紫外光:证件检测,金属表面划痕检测,点胶溢胶检测
X光:透视检测,轮毂划痕等
实际应用中光源的选择
- 根据物体的形状选择适合的光源
- 根据所检测物体的颜色选择光源
- 根据光源的角度选择光源,如果选择一个错误角度的光源,哪怕光源再亮,反射的光线却没有被镜头所吸收,图象也是黑的
当使用环形光源检测物体反光的情况下,可以使用条形光源代替;当使用条形光源视野无法使得物体显现时,用环形光源代替;更多精彩内容。
镜头
相机
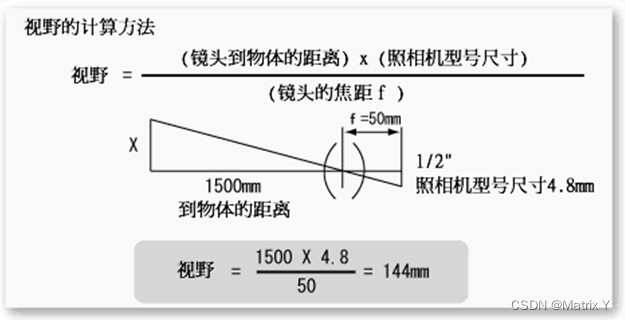
视场计算方法
放大倍率计算方法

焦距计算方法

传感器尺寸大小解释

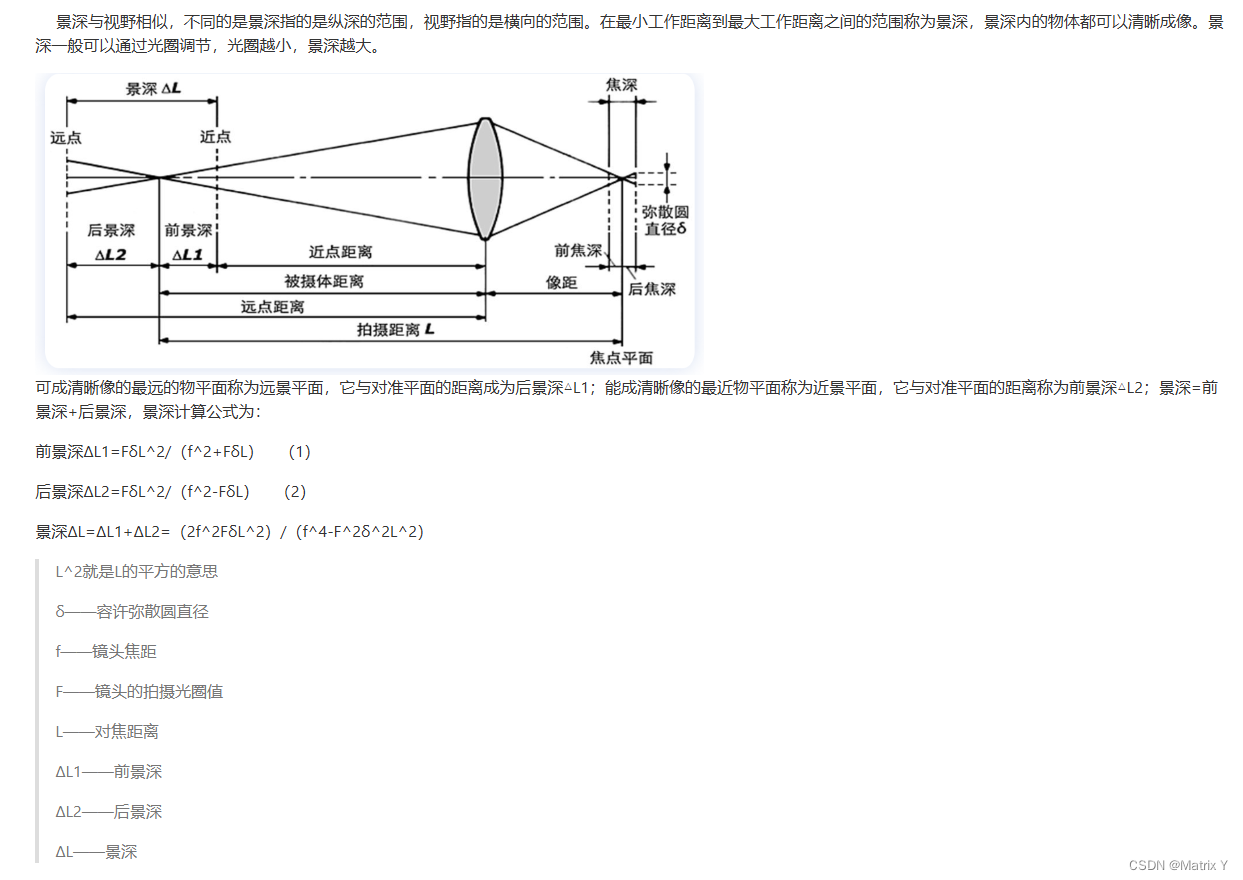
景深DOF计算公式
相机选择案例
**首先要确定目标的精度,然后以精度为根据选择分辨率。**然而为增加系统稳定性,不会只用一个像素单位对应一个测量/观察精度值,一般可以选择倍数4或更高。这样该相机需求单方向分辨率为1000,选用130万像素已经足够。
接着看工业相机的输出,如果是体式观察或机器软件分析识别,分辨率是越高越好;若是VGA输出或USB输出,则还依赖于显示器的分辨率,工业相机的分辨率再高,显示器分辨率不够,也是没有意义的;利用存储卡或拍照功能,也是尽量选择高像素的相机。
选择合适的分辨率,需要根据系统的需求来选择相机分辨率的大小,通常系统的像素精度等于视场(长或宽)除以相机分辨率(长或宽)
如果需要动态取像(飞拍)请一定选全局快门,卷帘快门只能用于静态取像。
如果要求拍摄的物体是运动的,要处理的对象也是实时运动的物体,那么当然选择CCD芯片的相机为最适宜。但有的厂商生产的CMOS相机如果采用帧曝光的方式的话,也可以当作CCD来使用的
镜头选型案例

一般提完需求之后,供应商会给我们选好相机,镜头,光源。我们如果知识做软件层面的开发的话,了解即可。但是要记住的就是,成像做的好,后期事半功倍。