前言
实时目标检测在自动驾驶、机器人导航、物体追踪等领域应用广泛,近年来,YOLO 系列模型凭借其高效的性能和实时性,成为了该领域的主流方法。但传统的 YOLO 模型通常采用非极大值抑制 (NMS) 进行后处理,这会增加推理延迟,阻碍了其端到端部署的应用。此外,现有的 YOLO 模型在架构设计方面也存在着一些局限性,例如计算冗余、参数利用率低等问题,这些问题限制了模型的性能和效率。
-
Huggingface模型下载: https://huggingface.co/kadirnar/Yolov10
-
AI 快站模型免费加速下载: https://aifasthub.com/models/ kadirnar
技术特点
为了克服这些局限性,清华大学研究团队推出了全新一代的实时目标检测模型 YOLOv10,旨在进一步提升 YOLO 模型的性能和效率,并实现端到端的部署。YOLOv10 主要包含两方面的创新:
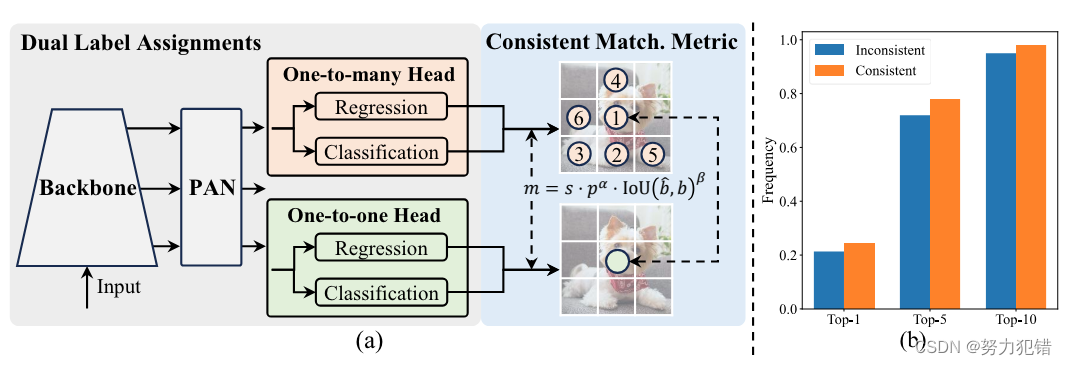
NMS-free 训练
传统 YOLO 模型在训练过程中使用一对多标签分配策略,这会导致推理阶段需要 NMS 进行后处理,降低了效率。为了解决这个问题,YOLOv10 采用了一致性双重标签分配策略 (Consistent Dual Assignments)。该策略将一对多标签分配与一对一标签分配结合在一起,既保留了前者的丰富监督信息,又避免了 NMS 的需要。在训练阶段,模型同时优化两个分支,而在推理阶段,则直接使用一对一分支进行预测,从而实现了端到端部署。
全方位优化模型设计
为了进一步提升 YOLO 模型的效率和性能,YOLOv10 在模型架构设计方面进行了全面的优化,主要包括以下几个方面:
-
轻量级分类头 (Lightweight Classification Head): 针对分类头和回归头的计算差异,YOLOv10 采用了更轻量级的分类头结构,减少了计算开销,同时保持了良好的性能。
-
空间通道 解耦 下采样 (Spatial-Channel Decoupled Downsampling ): YOLOv10 通过将空间降维和通道扩展分离,减少了计算量,同时最大限度地保留了信息。
-
秩引导模块设计 (Rank-Guided Block Design): YOLOv10 通过分析不同模块的秩 (Rank),根据模块的冗余程度采用不同的模块设计,例如,在冗余度较高的模块中采用更紧凑的结构,从而提高了模型效率。
-
大核卷积 (Large-kernel Convolution ): YOLOv10 在深层模块中使用大核深度可分离卷积,有效地扩展了感受野,提升了模型的特征提取能力。
-
部分自注意力模块 (Partial Self-Attention): 为了提升模型的全局建模能力,YOLOv10 引入了部分自注意力模块,它只对部分特征进行自注意力计算,并通过 1x1 卷积进行融合,从而降低了计算复杂度,提高了效率。

性能表现
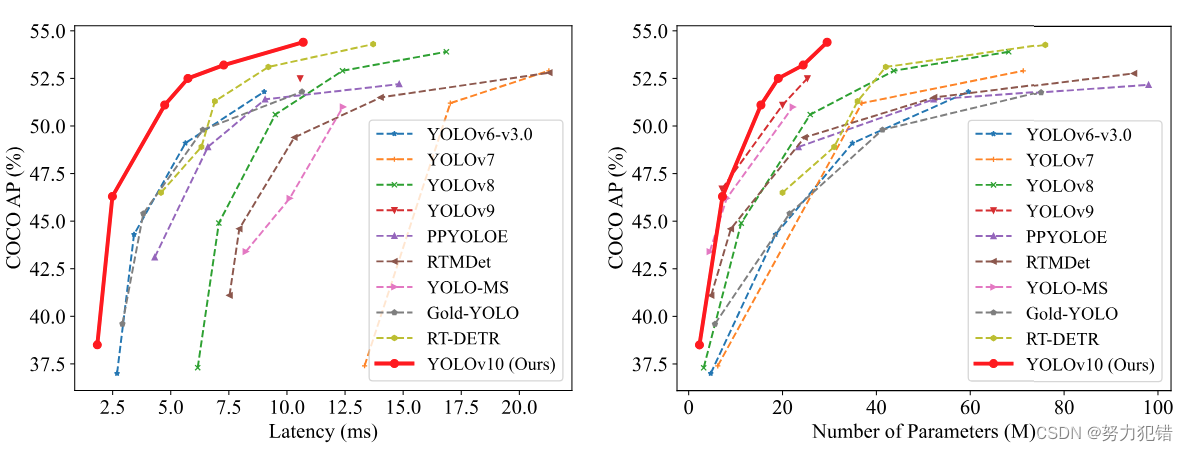
YOLOv10 在 COCO 数据集上取得了显著的性能提升,展现出优异的精度-效率平衡能力。与之前的 YOLO 模型相比,YOLOv10 在保持甚至提升精度的同时,显著降低了推理延迟,参数量和计算量也大幅减少。
-
速度提升: 例如,YOLOv10-S 比 RT-DETR-R18 速度快 1.8 倍,参数量减少 2.8 倍,计算量减少 2.8 倍,同时保持相似的精度。
-
参数量和计算量减少: 与 YOLOv9-C 相比,YOLOv10-B 速度提升 46%,参数量减少 25%,精度保持一致。

应用场景
YOLOv10 作为高效轻量、端到端实时目标检测的新标准,在各种应用场景中展现出巨大潜力,例如:
-
自动驾驶: 实时检测道路上的车辆、行人、交通信号灯等目标,为自动驾驶系统提供可靠的信息。
-
机器人导航: 帮助机器人实时识别周围环境中的物体,并进行避障和路径规划。
-
视频监控: 实时分析监控视频中的目标,例如识别犯罪嫌疑人、检测异常事件等。
-
人机交互 : 例如,在智能手机、平板电脑等设备上实现实时物体识别和跟踪。
总结
YOLOv10 通过引入一致性双重标签分配和全方位优化模型设计,在实时端到端目标检测领域取得了重大突破。该模型不仅在速度和效率方面表现出色,而且在精度和参数利用率方面也有显著提升,为开发者提供了更强大、更易于部署的实时目标检测工具。YOLOv10 的开源发布,将推动实时目标检测技术的发展,为各种应用场景带来更多可能性。
模型下载
Huggingface模型下载
https://huggingface.co/kadirnar/Yolov10
AI快站模型免费加速下载