MATLAB是一个十分便捷的软件,里面提供了许多集成的组件,本文利用simulink实现模糊控制器实现对某个对象追踪输入。
这里的对象根据自己的需求可以修改,那么搭建一个闭环控制系统并不是难事儿,主要是对于模糊控制器参数的设置,我这里simulink的仿真图搭建如下:
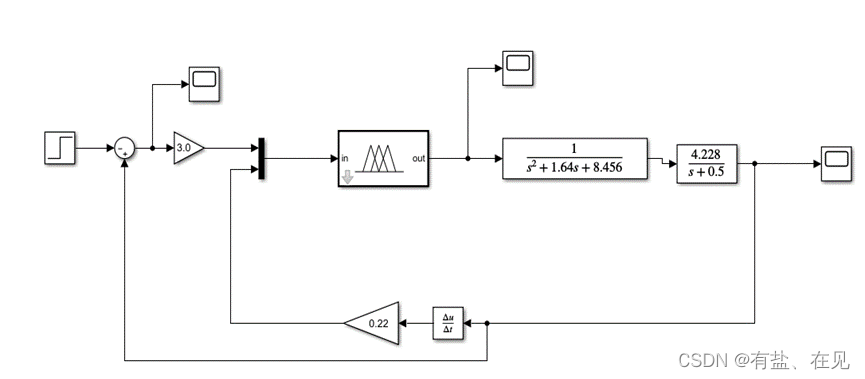
使用示波器观察了系统输出,控制器输出和误差的变化曲线。
误差E的波形图:

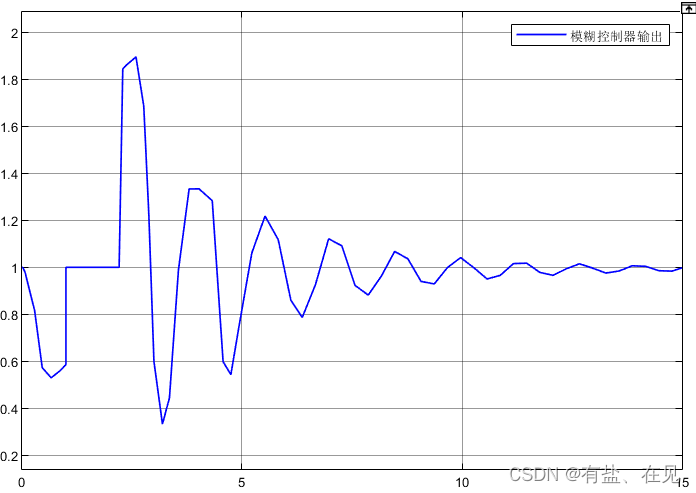
模糊控制器输出波形:
输出响应波形:
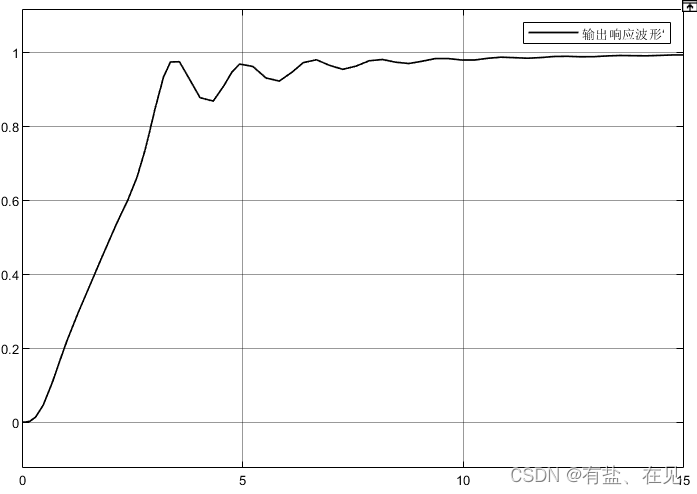
输入为阶跃响应 1 。
可见最终没有超调,上升时间<3s 。
具体的代码实现可见:https://download.csdn.net/download/mingangel/89403629