题目:
- 注意题目中说明了数据时非递减的,那么这样就存在二分性,能够实现logn的复杂度。
- 二分法每次只能取寻找特定的某一个值,所以我们要分别求左端点和有端点。
分析第一组用例得到结果如下:
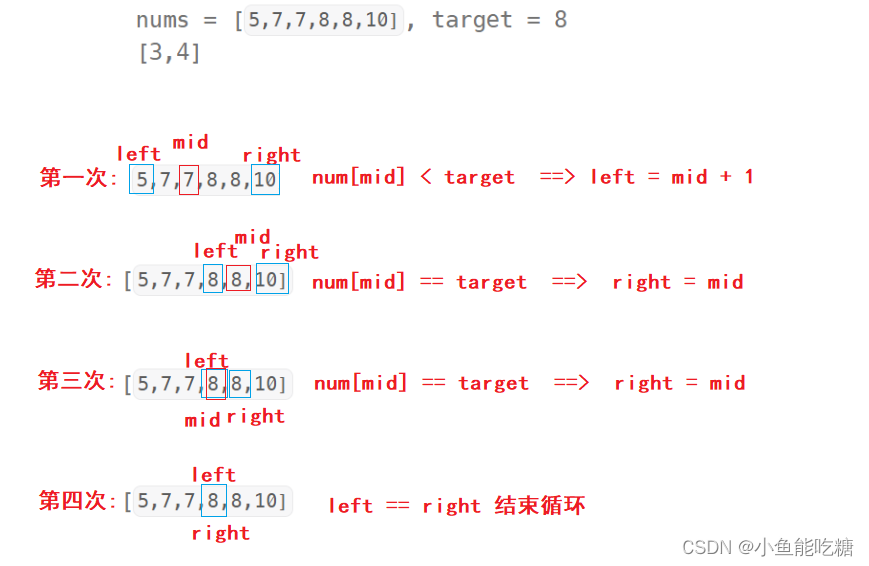
成功找到左端点8
由此可知,用二分法去寻找左端端点的时候:
-
若
num[mid]<target,那么此时mid的左边包括自身的值都小于target,所以直接执行赋值操作left = mid + 1即可。 -
当
num[mid]= =target的时候,由于可能此时的mid已经是左端端点了。但是 只是可能是左端点了,也有可能不是左端点,所以相等的情况就要和大于的情况合并起来操作,执行right = mid操作。 -
当
num[mid]>target的时候,mid的右边包括自身都比target的值要大,执行right = mid具有合理性,不能执行right = mid -1因为此时和等于合并起来了,判断条件变成是num[mid] <= target在等于的情况下,可能成为左端的端点。图示*😗
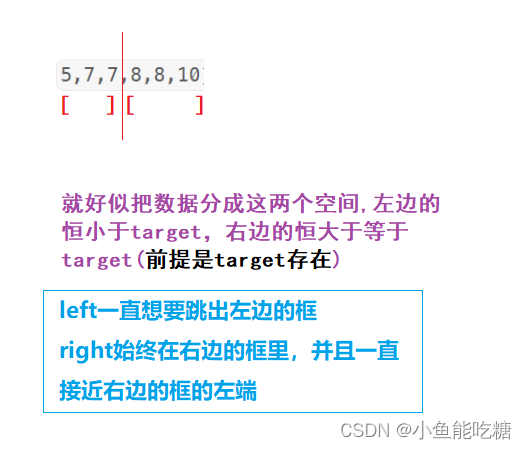
上述就是找最左边的端点的基本思路了,但是我们还有一些细节需要处理:
-
对于每次mid位置的取发:
1:mid = left + (right-left)/2
2:mid = left + (right-left +1)/2有以上两种取法,前后者在奇数的情况下相同,但是在偶数的情况下就会有所不同。
偶数的情况下,
1会取到中间两个数的片左边的那一个,2会取到中间两个数的偏右边那一个。
对于取左边端点来说:
到最终可能会有这么一种的情况:
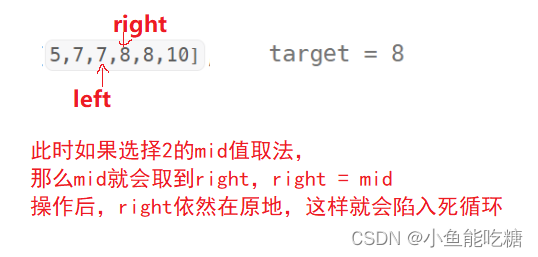
所以在用二分法寻找左侧端点的时候,应该要使用mid的第一种取法(mid = left + (right-left)/2 )。