RT-thread的内核对象基础应用

-
启动流程 :
以RT-Thread Studio为例,用户程序入口为位于 main.c 文件中 的main 函数。系统启动后先运行startup_stm32f103xe.s文件中的汇编代码,运行"bl entry"指令后跳转到components.c 文件中调用entry函数,进而调用rtthread_startup函数,进行 RT-Thread 系统启动。在运行rtthread_startup函数时调用rt_application_init函数,创建并启动main线程,等调度器工作后进入mian.c文件中运行 main函数,完成系统启动。
-
内存分布
MCU 包含FLASH和RAM两类存储空间。RT-Thread Studio将程序编译后分为text、data和bss三个程序段,分别存储在 MCU 不同的存储区。

-
什么是静态对象和动态对象,区别 ?
静态对象会占用 RAM 空间,不依赖于内存堆管理器,内存分配时间确定,运行效率高。动态对象不占用额外的RAM空间,依赖于内存堆管理器,运行时申请 RAM 空间,当对象被删除后,占用的 RAM 空间被释放,运行效率较低。
-
内核对象有那些
内核对象包括:线程,信号量,互斥量,事件,邮箱,消息队列和定时器,内存池,设备驱动等
-
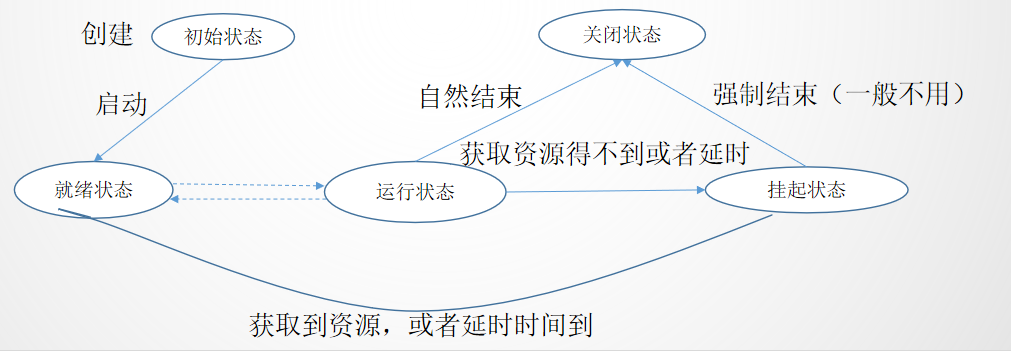
线程管理方式及特点?
(1)无线程运行时,从就绪线程列表中查找最高优先级线程运行。
(2)低优先级线程使高优先级的线程满足运行条件,当前线程停止运行,高优先级的线程运行。
(3)中断服务程序使高优先级的线程满足运行条件,中断完成时,被中断的线程挂起,高优先级线程运行。
线程切换时,调度器先将当前线程上下文信息保存,当再切回到这个线程时,调度器将该线程的上下文信息恢复。
-
线程有那些状态
-
什么是线程同步,有哪些方式?
线程间同步是指多个线程通过特定的机制来控制多个线程的执行顺序,线程间同步方式有信号量(semaphore)、互斥量(mutex)、和事件集(event),其核心思想是:在访问临界区的时候只允许一个 (或一类) 线程运行。 -
信号量的工作机制是怎样的?
线程可以获取和释放信号量,每成功获取一次信号量,信号值减1,每成功释放一次信号量,信号值加1。线程在获取信号量时,首先被添加至线程等待链表,当轮到其获取信号量时,如果信号值大于0,线程可以直接获取到信号量,如果信号值为0,则该线程无法获取到信号量,其状态由运行状态转换为挂起状态,直到有其它线程释放信号量,信号值大于0时,该线程才能获取到信号量,由挂起状态转换为就绪状态。
-
信号量的应用方法?
cpp
//(1)定义信号量句柄:
rt_sem_t dsem = RT_NULL;
//(2)主线程创建信号量:
dsem = rt_sem_create("dsem", 0, RT_IPC_FLAG_FIFO);
//(3)线程1#X释放信号量:
rt_sem_release(dsem);
//(4)线程2#Y获取信号量:
rt_sem_take(dsem, RT_WAITING_FOREVER);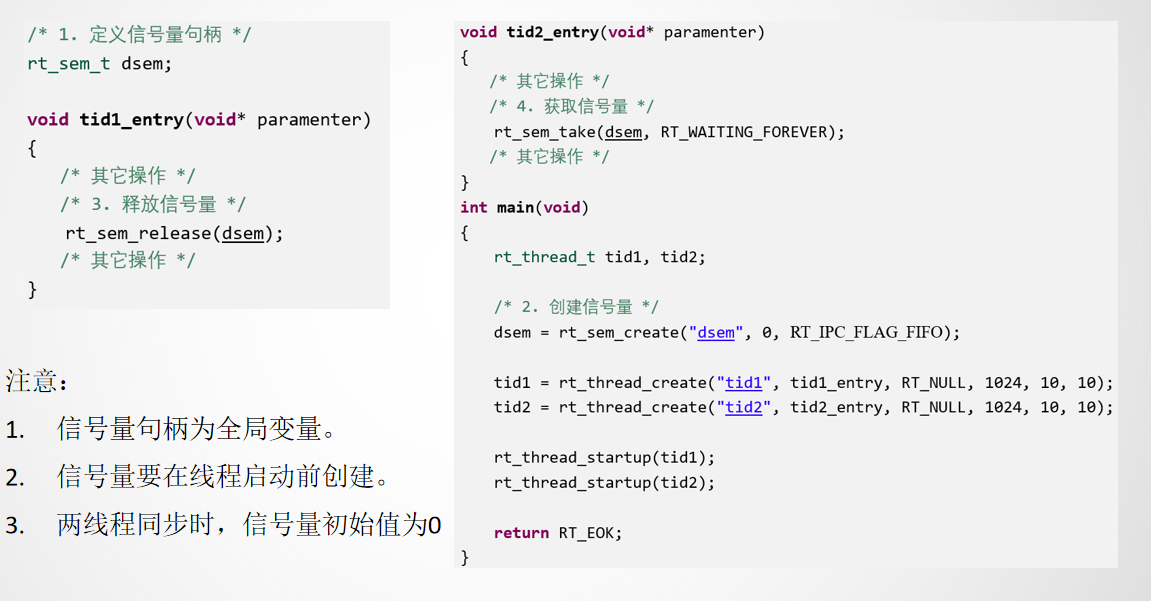
- 什么是会互斥量?
互斥量又叫相互排斥的信号量,是一种特殊的二值信号量
互斥量的状态只有两种:0和1。
线程可以获取和释放互斥量,线程成功获取互斥量后,该线程拥有互斥量的所有权,称为持有线程,某一个时刻一个互斥量只能被一个线程持有。互斥量只能由持有线程释放互斥量,其它线程无权释放互斥量。 - 互斥量和信号量的不同
互斥量:线程拥有互斥量的所有权,只能由持有线程释放;支持递归访问;能防止线程优先级翻转。
信号量:线程不具有信号量的所有权,可以由任何线程释放;线程递归持有会形成死锁;可能发生线程优先级翻转 - 什么是优先级反转?解决方法?
优先级翻转:当高优先级线程A通过信号量访问共享资源时,如果该信号量已被低优先级线程C持有,而线程C运行时被中等优先级线程B抢占,造成高优先级线程C被较低优先级线程阻塞,实时性难以得到保证。
优先级继承:暂时提高低优先级线程C的优先级至高优先级线程A的优先级,避免线程C被中等优先级线程B抢占,当低优先级线程C释放资源时,再将其优先级复原。注意:获得互斥量后,请尽快释放互斥量,并且在持有互斥量的过程中,不得再行更改持有互斥量线程的优先级。 - 互斥量的使用步骤?
cpp
//(1)定义互斥量句柄
rt_mutex_t dmutex = RT_NULL;
//(2)主线程创建互斥量:
dmutex = rt_mutex_create("dmutex ", 0, RT_IPC_FLAG_FIFO);
//(3)线程获取互斥量:
rt_mutex_release(dmutex);
//(4)持有线程释放互斥量:
rt_mutex_take(dmutex, RT_WAITING_FOREVER);
- 什么是事件集?
事件集是一种内核对象,用于线程间事件通知。事件集可以包含多个事件,每个事件可以被一个或多个线程等待。事件集可以由一个或多个线程设置,也可以由一个或多个线程清除。 - 事件集的使用步骤?
cpp
//(1)定义事件集句柄
rt_event_t dev_event = RT_NULL;
//(2)主线程创建事件集:
dev_event = rt_event_create("dev_event", RT_IPC_FLAG_FIFO);
//(3)线程1#X设置事件集:
rt_event_send(dev_event, 0x01);
//(4)线程2#Y等待事件集:
rt_event_recv(dev_event, 0x01, RT_EVENT_FLAG_OR | RT_EVENT_FLAG_CLEAR, RT_WAITING_FOREVER);-
什么是线程同步 ?
线程间同步用于解决线程执行顺序的问题,线程间通信主要用于线程间信息传递,同时能够改变线程执行顺序。线程间通信的方式有邮箱、消息队列和信号 -
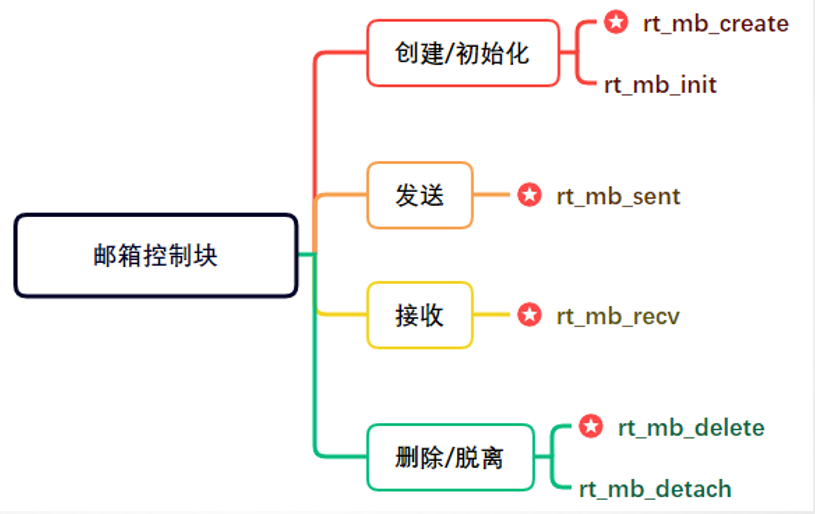
什么是邮箱,使用方法?
邮箱是一种线程间通信方法,开销较低,效率较高,邮箱中的每一封邮件只能容纳固定的 4 字节内容(针对 32 位处理系统,指针的大小即为 4 个字节,一封邮件恰好能容纳一个指针)。

cpp
//(1)定义邮箱句柄:
rt_mb_t dmb = RT_NULL;
//(2)主线程创建邮箱:
dmb = rt_mb_create("dmb", 10, RT_IPC_FLAG_FIFO);
//(3)线程1#X发送邮件:
rt_mb_send(dmb, (rt_ubase_t)value);
//(4)线程2#Y接收邮件:
rt_mb_recv(dmb, (rt_ubase_t*)&value, RT_WAITING_FOREVER);
- 社么是消息队列,用法?
消息队列是邮箱的扩展,能够接收来自线程或中断服务例程中不固定长度的消息,并把消息缓存在自己的内存空间中

用法:
cpp
//(1)定义消息队列句柄:
rt_mq_t dmq = RT_NULL;
//(2)主线程创建消息队列:
dmq = rt_mq_create("dmq", 100, 10, RT_IPC_FLAG_FIFO);
//(3)1#线程发送消息:
rt_mq_send(dmq, &b, sizeof(b));
//(4)2#线程接收消息:
rt_mq_recv(dmq, &b, sizeof(b), RT_WAITING_FOREVER);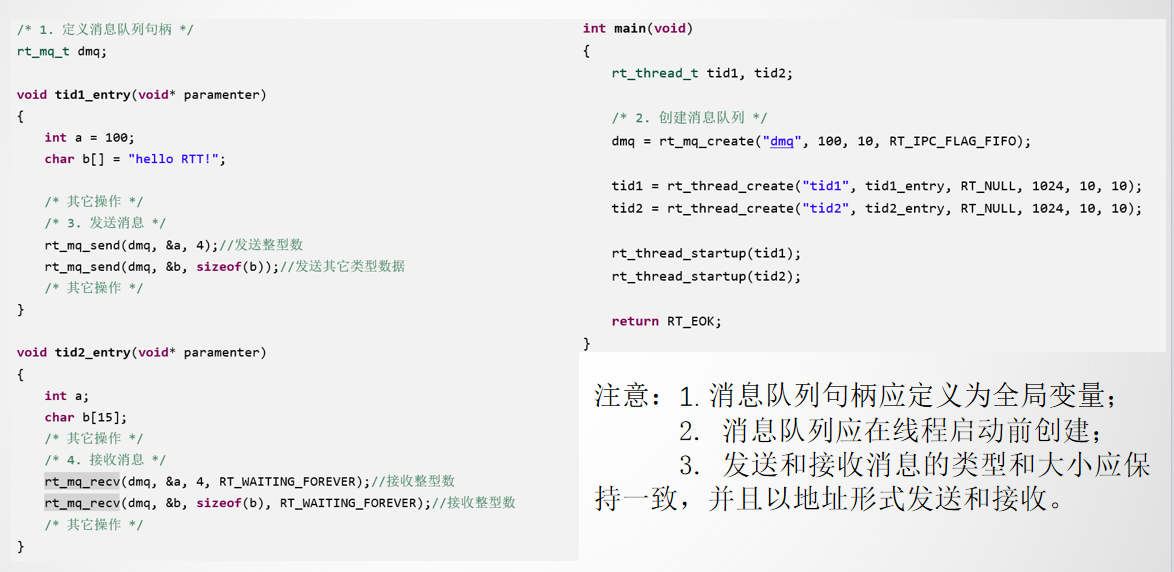
- 什么是信号,使用方法?
信号(又称为软中断信号),在软件层次上是对中断机制的一种模拟,用来通知线程发生了异步事件,用做线程之间的异常通知、应急处理。在原理上,一个线程收到一个信号与处理器收到一个中断请求可以说是类似的。
信号本质是软中断,线程不必通过任何操作来等待信号的到达,事实上,线程也不知道信号到底什么时候到达,线程之间可以互相通过调用 rt_thread_kill() 发送软中断信号。
信号的三种处理方法:
- 指定处理函数
- 忽略信号
- 系统默认值
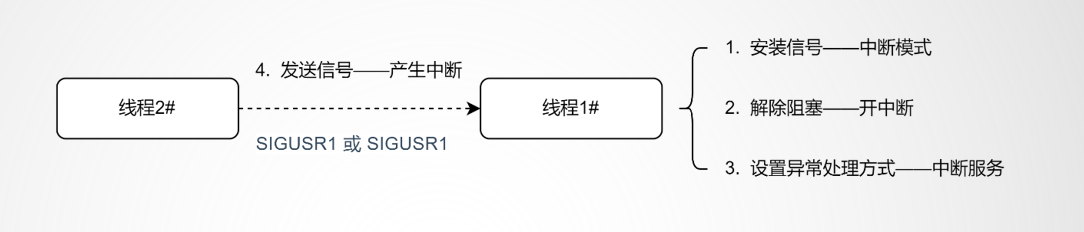
用法:
假设线程1 #需要对信号进行处理。首先,线程1要执行三个操作: 安装信号(类似硬件中工作方式设置为中断模式)、 解除阻塞(类似开中断)和设置异常处理方式(类似中断服务)。然后,线程2#可以给线程 1 发送信号(类似产生中断),触发线程 1 对该信号的处理。
cpp
//(1)在RT-Thread Settings中使能信号(默认不使能);
//(2)线程1#安装信号:
rt_signal_install(SIGUSR1, thread1_signal_handler);
//(3)线程1#解除信号阻塞:
rt_signal_unmask(SIGUSR1);
//(4)编写信号处理函数:
void tid1_signal_handler(int sig)
//(5)线程2#发送信号:
rt_thread_kill(tid1, SIGUSR1);
-
什么是IO设备
IO设备模型是建立在内核对象模型基础之上的一类对象,被纳入对象管理器的范畴。
-
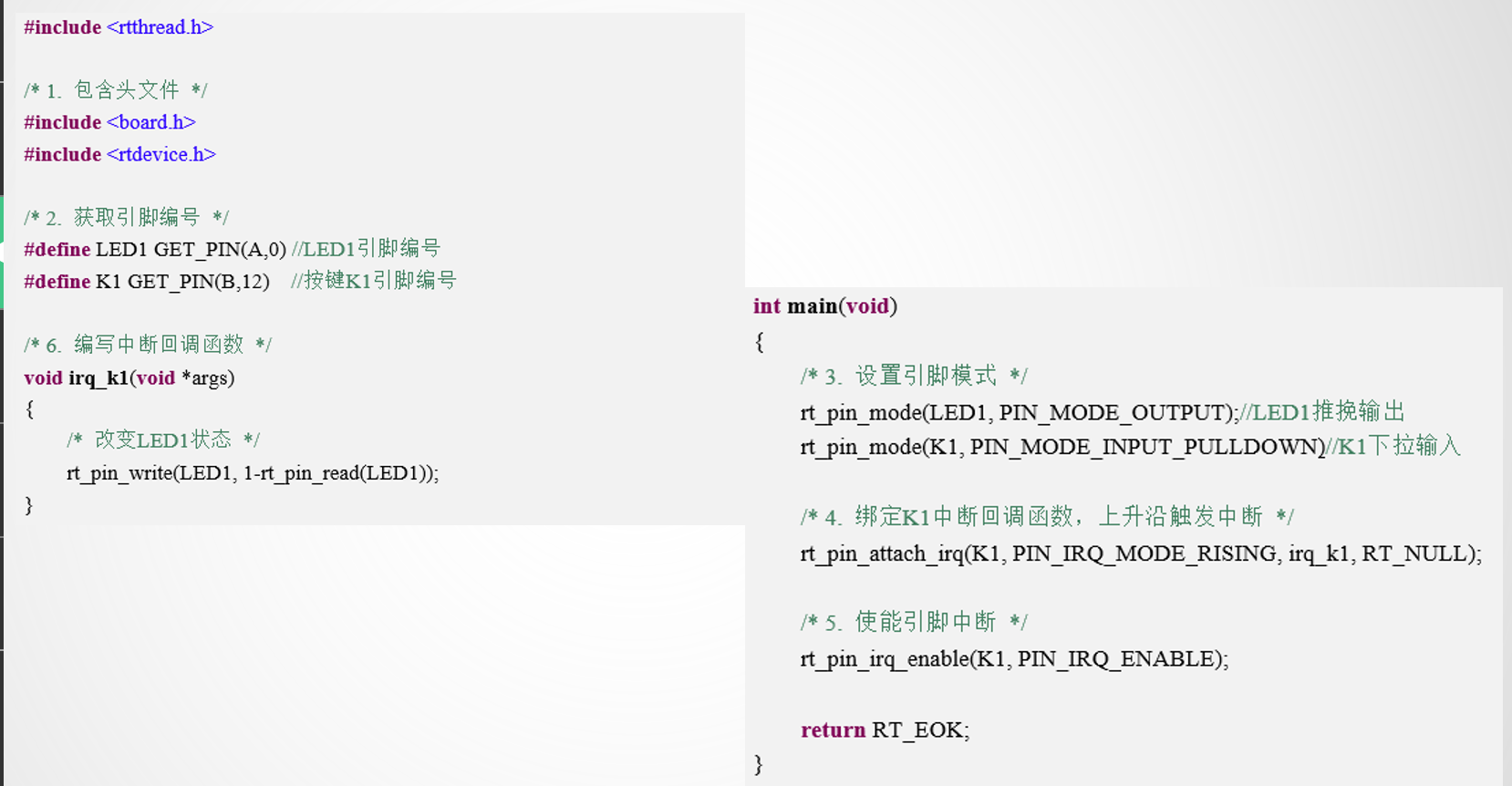
PIN设备的应用步骤
-
获取引脚编号(3种方法)
- 使用API
cpprt_base_t pin_num; pin_num = rt_pin_get("PA.0");- 使用宏
cpp#include <board.h> #define PIN_NUM GET_PIN(A,0)- 查看定义
cpp#define PIN_NUM 0 -
设置引脚模式
cpprt_pin_mode(pin_num, PIN_MODE_OUTPUT); -
设置引脚电平
cpprt_pin_write(pin_num, PIN_HIGH); -
设置引脚上下拉
cpprt_pin_pull_up(pin_num, 1);
-
中断示例: